
Fターム[5J070AB15]の内容
レーダ方式及びその細部 (42,132) | 送信信号 (3,620) | 連続波(CW) (917)
Fターム[5J070AB15]の下位に属するFターム
振幅変調(AM−CW) (30)
周波数変調(FM−CW) (701)
位相変調(PM−CW) (30)
Fターム[5J070AB15]に分類される特許
101 - 120 / 156
小便器洗浄システム
【課題】複数のドップラーセンサから発信される電波同士が干渉して、自動洗浄機能が誤作動することを防止した小便器洗浄システムを提供する。
【解決手段】ドップラーセンサにより人体や尿を検知して使用後の便器を自動洗浄する自動洗浄機能を備えた複数の小便器を併設してなる小便器洗浄システムにおいて、複数の小便器のうちの一つに設けられた制御手段は、各小便器に設けた各ドップラーセンサを、その動作期間が互いに重複しないように間欠動作させるべく、他の小便器の制御手段へ、通信手段を介してドップラーセンサの動作タイミングを指定する動作タイミング情報を送信する主制御機能を実行し、この動作タイミング情報を受信した各制御手段は、動作タイミング情報に基づいて、各ドップラーセンサをそれぞれ間欠動作させる従制御機能を実行することにした。
(もっと読む)
電子走査式レーダ装置

【課題】時分割受信型電子走査型レーダにおいても、方向性を利用した干渉抑圧が可能な、電子走査式レーダ装置の提供
【解決手段】サンプリングされたビート信号RDを、各アンテナ素子について時間方向に複数の短時間データSDに切り出す。短時間データSDの周波数スペクトルから、干渉波の干渉成分周波数を検出する。干渉波の干渉成分周波数から、干渉波の折り返し前周波数の候補(fBB)を複数生成し、各候補について位相補正を行う。補正後の周波数に対してデジタルビームフォーミング処理を行って、方位方向の電力の最大ピーク(図10のP1,P2,P3,P4)をそれぞれ抽出し、最大のピーク電力(図10のP2など)を示す周波数候補を選択して、干渉成分の到来方位を推定する。推定された干渉成分の到来方位から、当該干渉成分を抑圧するフィルタを作用させ、干渉成分を抑圧する。
(もっと読む)
レーダ
【課題】接近してくる高速の飛翔体や車両等の移動体を高速に探知し、接近に対する対処をとるために必要な前記移動体の位置情報を得ることが可能で、高速捜索及び追尾に好適な、また電波干渉の小さいレーダを提供する。
【解決手段】XY平面上の3点(A,B,C)に配置したアンテナ6,16と、前記3点のうちのいずれか1点に配置したアンテナから符号変調された連続波の電波を送信波7として送信するための送信手段と、前記3点のアンテナに対応してそれぞれ設けられて、送信波7が飛翔体8で反射された受信波9を受信する受信手段とを備え、前記3点で受信した時の各々の受信波の伝搬時間を基に飛翔体8のXY平面上の位置を算出する構成である。
(もっと読む)
物体検知センサ
【課題】センサの真下付近から遠方を含む所定の監視領域に対して物体の位置を精度良く計測することができる物体検知センサを提供すること。
【解決手段】監視領域を物体検知センサ2からの距離に応じて複数の監視区画11,12,13に分割し、各区画を検知範囲とする複数のアンテナ3,4,5を切り替えて使用する。各アンテナ3,4,5の俯角方向のビーム幅は、物体検知センサ2の設置位置から遠い側を監視するアンテナほど小さくする。信号処理回路8において電波レーダの出力情報と電波照射経路とを照合することによって、設置した物体検知センサ2の真下を含む領域において物体の監視面内での位置を計測する。
(もっと読む)
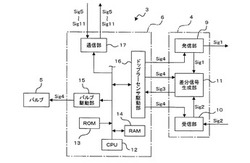
小便器洗浄装置
【課題】このような調整作業をせずとも人体検出や尿流検出の性能を確保すると共に、施工現場で簡単に自動設定することができる小便器洗浄装置を提供すること。
【解決手段】小便器の内側又は背面側に設けられたマイクロ波センサと、このマイクロ波センサからのセンサ出力信号を増幅する増幅部と、この増幅部によって増幅されたセンサ出力信号の交流電圧成分から対象物検出周波数成分を抽出する対象物検出抽出部と、この対象物検出抽出部の出力に基づいて対象物検出を行う制御部とを備えた小便器洗浄装置において、センサ出力信号の直流電圧成分の電圧レベルに応じて、増幅部の増幅率を変更する。
(もっと読む)
マイクロ波撮像システム及びマイクロ波による撮像方法
【課題】
離れた領域内の、禁制品等の対象物を識別するのに十分な解像度で離れたところのマイクロ波撮像を実行することが可能なマイクロ波撮像システム及びマイクロ波による撮像方法を提供。
【解決手段】
複数のアンテナ素子を含むアンテナアレイが、離れた領域を含む容積部分内のターゲットにマイクロ波照射が向かうようにそれぞれの方向係数がプログラム可能にされ、ターゲットから反射された反射マイクロ波照射を受信するようにそれぞれの方向係数が更にプログラム可能にされている。プロセッサは、反射マイクロ波照射の強度を測定し、容積部分のマイクロ波画像内のボクセルの値を求める。そして、離れた領域内の対象物を識別するのに十分な解像度でマイクロ波画像を作成する。
(もっと読む)
マイクロ波ドップラーセンサ
【課題】 前面にある障害物の影響を受けることなく高感度にかつ誤動作なく移動物体を検出できるマイクロ波ドップラーセンサを提供すること
【解決手段】 マイクロ波を生成する局部発振器11と、そのマイクロ波を放射する送信アンテナ13と、送信アンテナから放射されたマイクロ波の反射波を受信する受信アンテナ14と、受信アンテナから受信したマイクロ波と局部発振器から出力されるマイクロ波を混合する第1ミキサ12と、第1ミキサの出力と位相が90度異なる第2ミキサ18と、第1,第2ミキサのそれぞれの出力を2値化する各2値化処理部19と、それら両2値化処理部の出力からから動体を検出する動体検出判定部20を備える。動体検出判定部は、2値化処理部から出力される信号成分であるドップラー信号と雑音成分であるその他の信号とを検出し、信号成分と雑音成分から動体検出を行う。
(もっと読む)
マイクロ波ドップラーセンサ
【課題】 ドップラーセンサ自身の持つノイズや蛍光灯などの影響によるノイズの影響を受けることなく高精度に動体を検出することができるマイクロ波ドップラーセンサを提供すること。
【解決手段】 局部発振器11からの出力信号を送信アンテナ13から出射し、対象物20からの反射波を受信アンテナ14で受信する。出力信号は、第1ミキサ12に直接注入し、第2位相器17を介して第2ミキサ18に注入する。反射波は、第1位相器16を介して第1ミキサに入力し、第2ミキサへは直接入力する。各位相器は位相を90度遅らせる。動体からの反射波は、ドップラー効果により周波数変調されるので、各ミキサから混合信号として出力されるドップラー信号は位相差が180度生じる。第2ミキサによる混合信号を負帰還増幅器19を用いて局部発振器11で生成される信号を振幅変調する。ノイズ等の不要な振幅性雑音成分は位相差が生じないため抑圧される。
(もっと読む)
移動体検知装置及び移動体検知方法
【課題】外乱の影響を受けずに移動体を正しく検知する。
【解決手段】基準電圧生成部14は、検波器13が検波した検波信号S3の信号レベルを基準電圧値Vref0に加算し、コンパレータ15は、信号S2と基準電圧値Vrefとを比較して、パルス信号P1を出力する。カウンタ16は、パルス信号P1のパルス数をカウントしてトリガ信号P3をリトリガーブル・タイマ18に出力し、リトリガーブル・タイマ18は移動体検知信号P4を出力する。自走タイマ17は、パルス信号P1の出力が停止している場合、カウンタ16に、トリガ信号P3の出力間隔よりも長い間隔でリセット信号P2を出力する。雪等の外乱により、パルス信号P1の出力が間歇的となった場合、パルス信号P1がリセットされるため、リトリガーブル・タイマ18はHレベルの移動体検知信号P4を出力しなくなる。
(もっと読む)
車載用侵入検知装置および検知方法
【課題】盗難と関係の無いような現象に基づく侵入発生の信号を、違法な侵入の場合に発生する信号と区別し、後検出を防止する。
【解決手段】車内に送信した送信波が車内の物体に反射した反射波を解析して車内への侵入を検出する車載用侵入検知装置において、前記反射波の1周期における最大の出力が所定レベル以上である状態が連続して第1の所定時間続かなかった場合、侵入とは認識しないように設定されていると共に、該所定レベル以上である状態の時間計測中は前記反射波が前記所定レベル以下に低下しても該所定レベル以下の継続時間が第2の所定時間以下である場合は前記所定レベル以上である状態の時間計測を継続させるように設定する。
(もっと読む)
移動体測定システム
【課題】 簡易な構成により、被測定物までの距離及び位置を容易に測定することが可能な移動体測定システムを提供する。
【解決手段】 移動体測定システムS1は、被測定物Zまでの距離L1,L2を電波によって測定する複数の距離センサ10a,10bと、複数の距離センサ10a,10bのそれぞれからの測定情報及び複数の距離センサ10a,10b同士の配置情報L0に基づいて、被測定物Zの位置を求める演算部21と、を備える。
(もっと読む)
防犯センサ
【課題】検知対象物体の移動方向や位置に関わらず常に的確な検知を行うことができる信頼性の高い防犯センサを提供する。
【解決手段】検知エリアに向けてマイクロ波を送信し、この検知エリア内に存在する物体からの反射波を受信して、その物体までの距離に対応する距離情報を出力するとともに、その物体の方向情報を出力するマイクロウエーブセンサ320と、これによって得られる2次元物体位置情報の時間的な変化に基づいて前記物体の移動パターンを認識し、その移動パターンに基づいて前記検知エリア内に検知対象物体が存在しているか否かを判別する検知対象物体存在判別手段332と、この検知対象物体存在判別手段によって検知対象物体が存在していると判別された場合に警告信号を出力するように制御する警告信号出力制御手段333とを備える。
(もっと読む)
レーダ装置
【課題】 2周波CWモノパルス方式のレーダ装置において、移動する人からの反射波はドップラ信号の周波数スペクトルに先鋭なピークを生じにくく検出しにくい。
【解決手段】 2つの受信部によりLチャンネル、Rチャンネルのドップラ信号を取得する。各チャンネルの2周波の送信波に対するドップラ信号からLチャンネルの距離情報350,Rチャンネルの距離情報352を取得する。周波数毎に両距離情報の差の絶対値354を求め、その絶対値が所定の閾値DErrを越える帯域358はノイズ信号を含むものとして除去し、物体からの反射波に基づくドップラ信号を含む有効周波数帯域を取得する。同様に、両チャンネルのドップラ信号に基づいて、反射波の到来する角度情報を送信周波数に対応して2種類取得し、それらの相関に基づいて有効周波数帯域を抽出する。取得した有効周波数帯域の情報に基づいて移動物体の検知、位置等の測定を行う。
(もっと読む)
距離測定装置、距離測定方法および距離測定プログラム
【課題】 狭い放射周波数帯域においても、近距離まで精度良く計測可能な距離測定装置、距離測定方法および距離測定プログラムを提供する。
【解決手段】 送信部20は、発信部12の出力信号と同一周波数fの電磁波を計測軸(x軸)方向に放出する。検出部30は、方向性結合器32にて検出した反射波Rを送信信号の同相信号と直交信号とにより同期検波し、検波信号から直流成分を抽出することにより、反射波Rの同相成分I(f)と直交成分Q(f)とを検出する。解析信号生成部42は、反射波Rの同相成分I(f),直交成分Q(f)と、所定の距離d0に応じた周期性を持つ信号I0(f),Q0(f)とをミキシングし、得られた側帯波の一方のみを用いて解析信号p(f)を生成する。フーリエ変換部44は、解析信号p(f)をフーリエ変換して得られたプロファイルP(x)から測定対象物までの距離を求める。
(もっと読む)
定在波測距装置
【課題】 定在波測距装置において、距離測定の高精度と高速化を両立させる。
【解決手段】 信号送受信部2から周波数をステップ状に変化させた送信信号を送出させ、サンプリング部3では受信信号の定在波を送信信号の周波数に同期したタイミングでサンプリングする。第1の距離計測部22で周波数ごとに空間伝播遅延時間に対応するサンプリング波形の振幅変動区間の時間幅に基づいて第1の距離値R1を算出するとともに、第2の距離計測部23で振幅が変動する区間を除く領域の振幅情報を、送信信号の周波数ごとに並べて生成した振動波形の振動周期に基づいて第2の距離値R2を算出する。周波数ステップごとに距離値R1が得られるので、精度の高い距離値R2とともに高速化が図れる。
(もっと読む)
防犯センサ
【課題】誤報が発生することを極力回避するとともに、特定方向の検知を禁止したり方向によって検知感度を変更可能とすることで動作の信頼性を高めることが可能な防犯センサを提供する。
【解決手段】検知エリアに向けてマイクロ波を送信し、この検知エリア内に存在する物体によって反射された前記マイクロ波を受信して、その受信強度に応じた反射波受信強度信号を出力するマイクロウエーブセンサ120と、方向可変アンテナ装置110と、この方向可変アンテナ装置110に対して送受信方向の走査を指示して反射波受信強度信号の出力との関係を求める走査測定手段131と、求められた関係に基づいて検知対象物体が存在しているか否かを判別する検知対象物体存在判別手段132と、検知対象物体が存在していると判別された場合に警告信号を出力する警告信号出力制御手段133とを備える。
(もっと読む)
交通渋滞と「つるつる路面」検知装置および河川流量計測監視装置と防災防犯監視および防災救助装置
【課題】交通渋滞および降雪地域における「つるつる路面」の検出とそれを告知する対策は急務である。これらを解決するために映像やセンサーが数多く設置させる。その場合、動画像を光ケーブルなどのネット回線を利用するところとなるが、センサーデータと動画像が回線に占める占有率が増大し、回線の効率は劣化する。
【解決手段】マイクロ波を感知しこれを音声波形データに変換する。棄却閾値以外の値を抽出して補正し誤差を最小とすることで、交通渋滞、「つるつる路面」の検知と河川の流計測における表面の速度を測定する。これに映像を加え映像は動画の差分を抽出し、センサーと組み合わせて遅延画像を蓄積することにより、ネット上の回線の占有率を大幅に引き下げる。緊急時には整備したこれらの機器を非常用の通信機器として使用する。広くドライバーに告知することは事故防止につながる。河川にあっては水害対策および観測者の安全確保を実現する。
(もっと読む)
レーダ装置
【課題】様々な走行状況において障害物を効果的に検出する。
【解決手段】発振器10は、FM−CWモードとCWモードの両方で発振信号を出力し、スイッチ14は広角送信アンテナ16a、狭角送信アンテナ16bを切り換えて電波を送信する。送信波は障害物に当たって反射され、受信アンテナで受信される。受信アンテナ20で得られる受信信号をミキサ22で送信波と混合し、得られた差信号をフィルタ24でフィルタリングしてビート信号を得る。ビート信号に基づき、信号処理回路26が障害物の距離、速度を検出する。そして、制御回路30は、2種類のモード、2種類の送信アンテナ16a、16bを適応的に切り換えて、各種状況で効果的な障害物の検出を行う。
(もっと読む)
航空機用レーダ・システム
使用中に自機を取り囲む領域内の少なくとも1つの監視可能なゾーンにある別の航空機を少なくとも検出するための設備を、航空機に設けるためのレーダ・システムであって、このシステムは、監視可能なゾーンごとに少なくとも1つのサブシステムを備え、サブシステムは、電磁探索信号を送信するための1つの送信器と、その探索信号の反射を受信するための少なくとも1つの受信器とを備え、送信器は、その航空機に対して静止した方向に探索信号を送信するように配列される。  (もっと読む)
(もっと読む)
クラブヘッド速度及びテンポを測定するための小型レーダー
【課題】ゴルフスイングの時間(94)を計るためにレーダーを用いる、ゴルフクラブヘッドのスイングを計る装置(10)である。
【解決手段】クラブヘッド速度の測定(88)も具備する。開示された実施形態の詳細には、ゴルフスイングの開始及び終了を検出し、及びレーダー信号の情報から検出できることが含まれる。好ましくは、RFドップラーレーダーが用いられる。様々な形式の使用及びディスプレイが提供される。従って、ゴルフのプレー及び素振りにおけるスイングパラメータの測定について改善した機器に対するニーズがある。
(もっと読む)
101 - 120 / 156
[ Back to top ]