
Fターム[5J070AK04]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 検出値の補正 (378)
Fターム[5J070AK04]の下位に属するFターム
温度補正 (28)
Fターム[5J070AK04]に分類される特許
61 - 80 / 350
速度推定装置及びコンピュータプログラム及び速度推定方法
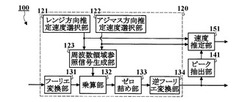
【課題】合成開口レーダによって観測された観測対象の速度を正しく推定する。
【解決手段】圧縮観測算出部(アジマス圧縮部120)は、複数の推定速度それぞれについて、上記受信信号から生成された所定のサンプリング間隔を有する一連の観測値と、上記推定速度に対応する参照信号との間の相関を取ることにより、上記所定のサンプリング間隔よりも短いサンプリング間隔を有する一連の圧縮観測値を算出する。ピーク抽出部141は、上記複数の推定速度それぞれについて、上記圧縮観測算出部が算出した一連の圧縮観測値のピークを抽出する。速度推定部151は、上記複数の推定速度のなかから、上記ピーク抽出部141が抽出したピークが極大となる推定速度を求めて、上記観測対象の推定速度とする。
(もっと読む)
レーダ装置

【課題】直列給電式のアレーアンテナを送受信アンテナとして用いたレーダ装置において、アンテナ素子の給電位相のずれを補正すること。
【解決手段】送信アレーアンテナ10の給電線路100は、終端において補正線路102に接続されている。送信アレーアンテナ10に隣接する受信アレーアンテナ11−1の、受電点側から数えて1つ目のアンテナ素子101aと、受電点との間の位置には、スイッチ103が設けられている。補正動作時には、スイッチ103によって、補正線路102と受信アレーアンテナ11−1の受電点とが接続され、受信アレーアンテナ11−1の受電点とアンテナ素子101aとの間が切断される状態となる。この補正動作時に補正線路102を介して受信した信号から位相変化量のずれを検出することができ、アンテナ素子101の給電位相のずれを補正することができる。
(もっと読む)
追尾装置
【課題】バイアス誤差推定精度を向上させた追尾装置を得る。
【解決手段】目標Tの動態データを取得する第1のセンサ11と、目標Tの距離、仰角および方位角を取得する第2のセンサ12と、動態データを第2のセンサ12の航跡出力時刻に時刻合わせを行う補正処理部40と、時刻合わせが行われた動態データと第2のセンサ12の航跡とを比較して一致度を出力する一致度判定処理部50と、一致度に基づき、バイアス誤差推定処理部70における予測処理で使用する予測ベクトル算出式を切替える運動モデル設定処理部60と、運動モデル設定処理部60の設定結果に基づき、カルマンフィルタによるバイアス誤差推定処理を行うバイアス誤差推定処理部70と、バイアス誤差ベクトル推定値を蓄積するバイアス誤差データベース80と、バイアス誤差ベクトル推定値を用いてバイアス誤差補正値を算出するバイアス誤差補正処理部90とを備える。
(もっと読む)
半導体集積回路およびその動作方法
【課題】車載用ミリ波レーダ装置に搭載されA/D変換器とMPUを内蔵する半導体集積回路で、内蔵A/D変換器のチップ占有面積を削減して、内蔵A/D変換器の分解能を改善する。
【解決手段】半導体集積回路で、レーダ装置の複数の受信信号は、単一のデジタル補正型A/D変換器によってA/D変換される。単一のA/D変換器のデジタル補正型A/D変換器は、受信インターフェース1のマルチプレクサから出力される複数の受信信号を順次にA/D変換するフォアグラウンドデジタル補正型A/D変換器2、3、4、5である。単一のA/D変換器は、従属接続された複数の変換器MDAC1…Nを有するパイプライン型A/D変換器2を含む。半導体集積回路は、デジタル補正のための補正用信号生成部3とデジタル補正用D/A変換器4とデジタル補正部5を具備する。
(もっと読む)
レーダ装置
【課題】ターゲットにより反射された信号の直交検波後のI信号とQ信号との間に生じる位相ずれ量をリアルタイム且つ適正に補正し、ターゲットの到来角度の推定精度の劣化を抑制する。
【解決手段】所定の送信周期で高周波送信信号を送信アンテナから送信し、ターゲットに反射された反射波の信号を受信アンテナで受信する。所定の符号長の符号系列を分割したサブ符号長を有する第1、第2サブ符号系列と、第1、第2サブ符号系列にそれぞれ2種類の異なる係数を乗じた第3、第4、第5、第6サブ符号系列とから、第1送信周期では、第3サブ符号系列と第4サブ符号系列とを連結した符号を変調した第1の送信信号を生成する。第2送信周期では、第4サブ符号系列と第5サブ符号系列とを連結した符号を変調した第2の送信信号を生成する。生成された第1及び第2の送信信号を高周波送信信号に変換し、送信アンテナから送信する。
(もっと読む)
ミリ波撮像装置
【課題】パッシブ型のミリ波撮像装置において、撮像時の反射板の駆動の影響を受けることなく画像を安定して撮像でき、しかも、その撮像画像から、人の足部に隠された物体を正確に検出できるようにする。
【解決手段】被写体2となる人体から放射されるミリ波帯の熱雑音を受信することで、被写体2の画像を撮像するミリ波撮像装置において、被写体2から放射されたミリ波帯の熱雑音をラインセンサ12に入射させる経路を、ケース20に設けられた開口部22、反射板16、及びレンズ14にて構成し、しかも、開口部22と反射板16は、ケース20の下方に配置し、ラインセンサ12は、レンズ14を挟んで、ケース20の上方に配置する。この結果、撮像時に装置全体が大きく振動して被写体2の撮像精度が低下するのを防止でき、しかも、被写体2の足部に隠された物体を良好に検知できるようになる。
(もっと読む)
信号処理装置、レーダ装置、信号処理方法、および信号処理プログラム
【課題】干渉以外のエコーに対する抑圧を低減しつつ、干渉成分を的確に除去することができる信号処理装置を提供する。
【解決手段】空間フィルタ172は、例えば鮮鋭化フィルタ等からなり、複数の過去のエコー信号を画像メモリ16から読み出し、注目サンプルの鮮鋭化を行う。例えば、注目サンプルy’(i,j)を囲む8画素のエコー信号を含む9画素についてのエコー信号を画像メモリ16から読み出し、鮮鋭化処理を行う。そして、相関処理部17は、画像データ生成部15から入力された最新のデータと、空間フィルタ処理後の過去のデータと、の重み付け加算を行う。
(もっと読む)
拡張現実のためのブロードバンドパッシブ追跡
それぞれが周囲の放送ソースからの電磁波(たとえば、無線周波数「RF」信号)を感知する能力を有するいくつかのパッシブ受信機を使用することができるブロードバンドパッシブセンシングおよび追跡システムに関する技術が、全般的に説明される。各パッシブ受信機は、1つまたは複数のアンテナによって感知するように構成され得る。異なる位置の複数の受信機が、関心のあるシーンの協調した追跡を行うように構成されたブロードバンドセンシングネットワークを形成するために利用され得る。一部の例によれば、ビームフォーミングアルゴリズムが、物体を測位および追跡するためにパッシブ受信機によって形成されたアンテナアレーを利用するブロードバンドセンシングネットワークに適用され得る。 (もっと読む)
レーダ装置
【課題】S/N比を改善し測距精度の向上を図った多周波パルス方式のレーダ装置を提供する。
【解決手段】電力の小さい近距離用パルスと電力の大きい遠距離用パルスを送信周波数を変えながら交互に送信し、目標で反射した近距離用パルスと遠距離用パルスをそれぞれ異なる周波数の帯域制限を与えて通過させた後出力する送受信系1〜6と、前記送受信系の出力から前記目標までの距離を測距する測距系7〜11と、を備えたレーダ装置。送受信系が、近距離用パルスと遠距離用パルスを生成して送信させると共に遠距離用パルスと近距離用パルスを切り換えるときに送信周波数をステップさせる合成帯域型の送信機1を含む。
(もっと読む)
先行車検出装置
【課題】2WS基準システムまたは4WS基準システムにおけるオフセット値に対して、さらに自車に適合する差分量を加算することによって、カーブ路における自車線上の先行車を精度よく検出できる先行車検出装置を提供する。
【解決手段】本発明の先行車検出装置は、自車の車両情報に基づいて当該自車が2WS車か4WS車かを判定する車両判定手段と、自車の前方にある物標の横位置情報を取得する横位置情報取得手段と、2WS車または4WS車に応じて横位置情報を自車のカーブ路における車体スリップ角が0度である直線走行方向基準の横位置情報に換算するオフセット値を算出するオフセット値算出手段と、オフセット値に基づいて横位置情報を直線走行方向基準の横位置情報に換算する直線走行方向基準換算手段と、直線走行方向基準の横位置情報に基づいて自車の前方にある物標が自車の前方にある先行車であるか否かを判定する先行車判定手段とを備える。
(もっと読む)
角速度推定装置及びコンピュータプログラム及び角速度推定方法
【課題】移動体の角速度を精度よく推定する。
【解決手段】周辺物体観測装置811(レーダ)は、移動体の周辺に存在する物体について、移動体を基準とした物体の相対位置を繰り返し観測する。相対位置取得部211は、周辺物体観測装置811が観測した観測結果を取得する。静止物体判定部220(停止物識別部)は、周辺物体観測装置811が相対位置を観測した物体が静止しているか否かを判定する。物体相関部230(停止物用追尾部)は、周辺物体観測装置811が観測した複数の相対位置のなかから、同一の物体について周辺物体観測装置811が観測した複数の相対位置を判定する。角速度推定部(状態推定部240、軌道推定部)は、移動体の角速度を推定する。
(もっと読む)
パッシブレーダシステムおよびパッシブレーダ方法
【課題】長時間積分時にも評価関数Pの先鋭度が劣化せず、低S/N環境下やステルス目標など低RCSの移動目標に対しても、検出・標定精度を高める。
【解決手段】散乱波を受信して時系列データを生成する第1の受信系と、直接波を受信して時系列データを生成する第2の受信系と、両時系列データに基づく相互相関を演算し、移動目標に対する到来時間差およびドップラ周波数差を観測情報として特定する相互相関演算手段(16)と、観測情報と測角値情報とを用いて、移動目標の位置を得る目標標定手段(17)とを備えるパッシブレーダ装置(10)を異なる位置に複数台配置し、各パッシブレーダ装置は、相互の観測情報を送受信する通信手段(18)と、すべてのパッシブレーダ装置で特定されたそれぞれの観測情報に基づいて、移動目標の瞬時速度ベクトルを推定する瞬時速度ベクトル推定手段(19)とをさらに備える。
(もっと読む)
画像レーダ装置
【課題】画像化する領域における補償誤差を小さくしつつ、分割する領域のサイズを従来のものよりも大きくして画像再生処理の効率を向上させるとともに、分割する領域の数を減らして結合後の画像における不連続部分を減らすことができる画像レーダ装置を得る。
【解決手段】軌道データ格納部12に格納されたプラットフォームの実軌道の軌道データに基づいて、参照軌道を算出する参照軌道算出部21と、地表上に、位相補償に用いられる複数の基準点を設定する複数基準点設定部22と、実軌道および参照軌道と基準点との距離差に基づいて、位相補償量を決定する補償量決定部23と、位相補償量に基づいて、観測データ格納部13に格納された観測データの位相を補償する補償処理部31と、位相補償後の観測データに対して画像再生処理を実行し、レーダ画像を再生する再生処理部32とを備える。
(もっと読む)
レーダ装置及び目標探知方法
【課題】被探知目標を正確に探知する開口合成技術を実現する。
【解決手段】レーダ装置は、複数の受信アンテナで受信された各エコー信号から生成された各ベースバンド信号に対して、等しい空間位相を与える送信アンテナ及び受信アンテナの組み合わせから得られる各ベースバンド信号を基準として開口合成を適用することにより、合成ベースバンド信号ベクトルを生成する信号合成部と、複数の送信アンテナのアレイ多項式と複数の受信アンテナのアレイ多項式との積から得られる合成アレイ多項式の各項の係数を用いることにより補正データを取得する補正データ取得部と、この補正データを用いて当該合成ベースバンド信号ベクトルを補正する補正部と、この補正部により補正された合成ベースバンド信号ベクトルを用いることにより角度推定を行う推定部と、を備える。
(もっと読む)
経路予測装置
【課題】観測データが長期間に亘って欠けている時においても信頼性ある経路予測が可能な経路予測装置を得る。
【解決手段】観測情報記憶部に記憶されている観測情報を監視し解析し、観測データが得られている間は該観測情報の解析結果を元に上記目標側経路評価関数パラメータ値調整部を周期的に実行し上記目標側経路評価関数パラメータ値記憶部に記憶されているパラメータの値を調整し、観測データが欠けている間は上記目標側経路評価関数パラメータ値記憶部に記憶されているパラメータの値を上記目標側最適経路生成部に入力して目標側最適経路を生成させる経路予測システムタスク実行部を含み、経路予測システムタスク実行部は、観測情報の解析結果に応じて、目標側経路評価関数パラメータ値調整部で調整するパラメータの数を変更する。
(もっと読む)
広帯域パルスレーダの距離計測方法
【課題】精度の高い距離計測が可能な広帯域パルスレーダの距離計測方法を提供する。
【解決手段】広帯域パルスレーダ信号の目標物からの反射波受信信号に対して各々異なる基底関数を使用する複数のウェーブレット変換を行なって各々ピーク値を算出する(ステップ23A,23B)。算出されたピーク値に補正を行ない(ステップ24)、この補正されたピーク値に基づいて距離算出を行なう。
(もっと読む)
先行車検出装置
【課題】従来に比して正確に先行車の位置を検出可能な先行車検出装置を提供する。
【解決手段】自車両の前方を走行する先行車の位置を検出する先行車検出装置であって、少なくとも先行車の左右方向の位置情報を検出する先行車位置検出手段と、現時点において検出した位置情報を補正するフィルタ補正手段と、先行車の走行状態を推定する先行車走行状態推定手段と、フィルタ補正手段による補正の度合いを、先行車走行状態推定手段によって推定された先行車の走行状態に応じて変更するフィルタ制御手段とを備える先行車検出装置である。
(もっと読む)
車両の周辺監視装置
【課題】レーダデータと赤外線カメラデータの同期ずれを補正する。
【解決手段】車両の周辺の物体を検出するレーダと、車両の周辺の画像を撮像するカメラと、を備える車両周辺監視装置において、レーダが検出した物体の位置に対応する、カメラが撮像した対応画像上の所定領域を特定して当該所定領域内の前記物体を特定する手段とを備え、特定された対応画像上の所定領域の移動量の時間変化と、カメラが撮像した画像上での所定物体の移動量の時間変化との位相ずれ量を算出する手段と、位相ずれ量がゼロになるように、レーダまたはカメラの出力信号の位相補正をおこなう位相補正手段と、を有する。
(もっと読む)
目標検出装置
【課題】演算負荷の低減を図った上で移動目標の検出精度の向上を実現する目標検出装置を得る。
【解決手段】パルスヒット毎ビデオ信号を生成するパルス圧縮手段(1)と、パルスヒット毎ビデオ信号の1CPI分に対してコヒーレント積分を行い、レンジ−ドップラー周波数空間で構成された1CPI分のビデオ信号を生成するCPI毎コヒーレント積分手段(2)と、1CPI分のビデオ信号に基づいて、CPI間での検出セルの推移を探索し、推移履歴を生成する探索処理部(100)と、推移履歴に基づいて、パルスヒット毎のビデオ信号の各検出セルを初回パルスヒット時のセル位置へ補正し、補正後のパルスヒット毎のビデオ信号に対してパルスヒット方向にフルコヒーレント積分処理を行う積分処理部(200)と、積分処理後のビデオ信号に対して閾値処理を行うことで、移動目標の検出を行う閾値処理手段(4)とを備える。
(もっと読む)
追尾装置
【課題】大目標と小目標との観測値の取り合いによる追尾性能の劣化を回避し、高精度の航跡を生成可能な追尾装置を得る。
【解決手段】センサ10と、位置相関マトリクスを生成する位置相関処理部20と、セル数相関マトリクスを生成するセル数相関処理部30と、位置相関マトリクスおよびセル数相関マトリクスを用いて相関調停結果を生成する相関調停処理部40と、相関調停結果を用いて観測値クラスタを生成する位置クラスタリング処理部50と、統合セル数観測値を監視する統合セル数観測値監視処理部 60と、カルマンフィルタにより統合セル数推定値および更新後の統合セル数予測値を生成する統合セル数更新予測処理部70と、カルマンフィルタにより航跡の位置速度予測値および位置速度推定値を生成する位置速度更新予測処理部80と、遅延処理部90と、表示処理部100と、を備える。
(もっと読む)
61 - 80 / 350
[ Back to top ]