
Fターム[2F065LL41]の内容
光学的手段による測長装置 (194,290) | 光学系 (17,149) | 格子 (823)
Fターム[2F065LL41]の下位に属するFターム
回折格子 (629)
Fターム[2F065LL41]に分類される特許
1 - 20 / 194
3D表面形状測定と組み合わされた位相ステッピングシェアログラフィーのための低コヒーレント干渉計システム
3次元形状データ取得装置の光学測定ヘッド
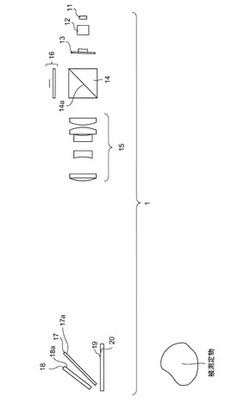
【課題】小型化の3次元形状データ取得装置の光学測定ヘッドを提供する。
【解決手段】投射光学系および撮像光学系は、プリズム型偏光ビームスプリッタ14と、ワイヤーグリッド偏光ビームスプリッタ17と、プリズム型偏光ビームスプリッタ14とワイヤーグリッド偏光ビームスプリッタ17との間に配置される結像光学系15とを有し、MEMS13と撮像手段16は、互いにプリズム型偏光ビームスプリッタ14の偏光分離面を挟み互いに交差する方向に配置され、ワイヤーグリッド偏光ビームスプリッタ17は、MEMS13から出射され結像光学系15を透過した光を透過し、ミラー18により被測定物表面に投射され被測定物表面で反射された光は、ワイヤーグリッド偏光ビームスプリッタ17の偏光分離面で結像光学系15に向けて反射させる構成とし、ワイヤーグリッド偏光ビームスプリッタ17の偏光分離面と、ミラー18の反射面とは互いに非平行とした。
(もっと読む)
3次元形状測定装置

【課題】3次元形状の測定精度をより改善できる3次元形状測定装置を提供すること。
【解決手段】本発明の3次元測定装置は、測定対象物を固定するワークステージと、光源、光源から照射された光を透過させる格子及び格子の格子イメージを測定対象物に結像させる投影レンズを含み、測定対象物に対して格子イメージを第1方向にN回入射した後、測定対象物に格子イメージを第2方向にN’回入射する投影部と(N及びN’は2以上の自然数)、結像レンズ及びカメラを含み、測定対象物によって反射される第1方向反射イメージ及び第2方向反射イメージを受信するイメージ取り込み装置と、イメージ取り込み装置に受信された第1方向反射イメージ及び第2方向反射イメージを用いて測定対象物の影領域を補償して測定対象物の3次元状態を算出する制御部と、を含む。
(もっと読む)
形状計測装置、及び形状計測装置の調整方法
【課題】正確に調整可能な形状計測装置を提供する。
【解決手段】第1の光を発する第1の発光部11、及び第2の光を発する第2の発光部12と、第1の光及び第2の光を受ける格子3と、平坦な基板が配置されるステージ14と、格子3を透過した第1の光を第1の入射角で基板表面に入射させ、格子3を透過した第2の光を第2の入射角で基板表面に入射させる投影光学系5と、第1の光による基板表面の格子3の第1の変形像、及び第2の光による基板表面の格子3の第2の変形像に基づき、基板表面の高さ方向の位置を算出する高さ算出部と、基板表面の高さ方向の位置が投影光学系5の焦点位置と一致するよう、ステージ14を移動させる移動装置15と、を備える、形状計測装置。
(もっと読む)
形状計測装置、形状計測システム、及び形状計測方法
【課題】低いコストで、広い高さ範囲を高精度に計測可能な形状計測装置を提供する。
【解決手段】第1の光を発する第1の発光部11、及び第2の光を発する第2の発光部12と、第1の光及び第2の光を受ける格子3と、測定物4が配置されるステージ14と、格子3を透過した第1の光、及び格子3を透過した第2の光の両方が透過する投影光学系5であって、第1の光を第1の入射角で測定物4表面に入射させ、第2の光を第2の入射角で測定物4表面に入射させる投影光学系5と、第1の光による測定物4表面の格子3の第1の変形像、及び第2の光による測定物4表面の格子3の第2の変形像に基づき、測定物4表面の高さの分布を算出する高さ分布算出部と、を備える、形状計測装置。
(もっと読む)
位置測定システム、リソグラフィ装置およびデバイス製造方法
【課題】従来の較正方法と比べてあまり時間がかからない較正を適用するより正確な位置測定システムを提供する。
【解決手段】位置測定システムは、第1部分EGおよび第2部分ESと、計算ユニットと、を備える。第1部分および第2部分は、第2部分に対する第1部分の位置を表す位置信号を提供することによって第2部材に対する第1部材の位置を決定する。計算ユニットは、位置信号を受信するための入力端子を含む。計算ユニットは、使用中、位置信号に変換を適用して第2部材に対する第1部材の位置を表す信号を得るように、および、変換に調整を適用して第1部分または第2部分あるいは両方のドリフトを少なくとも部分的に補償するように、構成される。調整は、第1部分または第2部分あるいは両方のそれぞれの所定のドリフト特性に基づく。所定のドリフト特性は、第1部分および/または第2部分の1つ以上の基本形状を有する。
(もっと読む)
微小角変位測定方法と装置
【課題】簡単な構造で、数十ナノラジアン以下の微小角変位を測定可能な微小角変位測定方法と装置を提供する。
【解決手段】レーザ光源12と、レーザ光源12からのレーザ光Lを収束又は発散させるレンズ18と、レーザ光Lを分岐させる偏光ビームスプリッタ20と1/4波長板22を有する。測定対象面24で反射したレーザ光Lが、臨界角直前の角度で臨界面26aに入射する臨界角プリズム26を備える。臨界角プリズム26の臨界面26aで反射したレーザ光Lが入射する一方の画像センサ30と、臨界角プリズム26の臨界面26aを透過したレーザ光Lが入射する他方の画像センサ32とを備える。各画像センサ30,32の各画素の出力を基に、測定対象面24の微小角変位を演算する微小角変位演算手段であるコンピュータ34を備える。臨界角プリズム26に入射するレーザ光Lを分割するビームスプリッタを設けても良い。
(もっと読む)
位置検出装置、位置検出方法、露光装置、露光方法およびデバイス製造方法
【課題】反射面を通過した光束に発生する偏光成分による相対的な位置ずれなどの影響を実質的に受けることなく、被検面の面位置を高精度に検出することのできる面位置検出装置。
【解決手段】投射系は、第1反射面7b,7cを有する投射側プリズム部材7を備えている。受光系は、投射側プリズム部材に対応するように配置された第2反射面8b,8cを有する受光側プリズム部材8を備えている。第1反射面および第2反射面を通過した光束の偏光成分による相対的な位置ずれを補償するための位置ずれ補償部材をさらに備えている。
(もっと読む)
形状計測装置及び形状計測方法
【課題】物体の形状計測を非接触且つ高精度で行い得る形状計測装置及び形状計測方法を提供する。
【解決手段】 本発明の形状計測装置1は、少なくとも5つの光源を等間隔に直線状に配列した光源アレイ11、1次元格子の格子面を有する格子プレート12、1次元格子が投影される計測対象物体21を撮影するカメラ13及び制御ユニット50を備える。制御ユニット50は、少なくとも5つの光源のうち隣接配置の少なくとも4つの光源からなる光源組を2組設定し、この2組の光源組における各光源を順次点灯するよう光源アレイ11を制御するとともに、それぞれ計測対象物体21に投影される1次元格子を撮影するようカメラ13を制御し、撮影された画像から2組の光源組による計測対象物体21上に投影された1次元格子の位相をそれぞれ算出し、当該2つの位相の差を位相シフト量として予め定めた換算式に基づいて計測対象物体21に関する高さ座標を求める。
(もっと読む)
鏡面反射面の形状測定
【課題】鏡面反射面の形状を測定する方法が提供される。
【解決手段】ターゲット面142に配置されたターゲット140の表面144に表示されたパターンを測定面122に配置された鏡面反射面124から反射させる。反射の画像が撮像面154において記録される。撮像面154に対する鏡面反射面124上の複数の点の位置が決定される。反射の画像上の複数のフィーチャ位置とパターン上の複数のフィーチャ位置との間の第1の関係が決定される。複数の点の位置を初期状態として用いて、鏡面反射面の表面プロファイル及び第1の関係を含む第2の関係から鏡面反射面の形状が決定される。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】従来の干渉計に比べて高精度な移動体の位置情報の計測を可能にする。
【解決手段】露光装置は、基板を保持して、XY平面内で移動し、XY平面に交差する反射面134を有するステージWSTと、計測装置20Y’とを備えている。計測装置は、ステージWSTの上方に配置され反射面134を介して入射した光ビームを回折させて反射面134に戻す固定スケール135と、反射面134に戻された光ビームを検出する検出部(124A、124B、126、28)と、を有する。計測装置は、固定スケール135からの戻りビームを、再度反射面134を経由させることで得られる前記光ビームの複数の回折ビームの干渉光を前記検出部で検出することで、ステージWSTのY軸方向の位置を計測する。
(もっと読む)
3次元形状測定装置
【課題】3次元形状測定装置を提供すること。
【解決手段】3次元形状測定装置は、光を発生する光源ユニットおよび光源ユニットから発生された光を格子パターンを有する格子パターン光に変更する格子ユニットを含み、格子パターン光を所定方向から測定対象物に照射する照明部、および格子ユニットを格子パターンの延長方向および格子パターンの配置方向に対して所定の傾斜方向に移送させる格子移送ユニットを含む。よって、製造コストを低減して、3次元形状測定装置は容易に管理することができる。
(もっと読む)
検出対象物の中心位置を算出する方法、装置およびプログラム
【課題】複数の検出対象物が任意の方向を向いて配置されている場合であっても、それぞれの検出対象物の中心位置を算出することができる方法、装置およびプログラムを提供する。
【解決手段】既知の半径を有する円筒または球を少なくとも一部に含む検出対象物の中心位置を算出する方法を提供する。当該方法は、少なくとも1つの検出対象物を撮像した入力画像を取得するステップと、検出対象物の形状に相当する領域を入力画像から抽出するステップと、抽出された領域についての高さ情報を取得するステップと、抽出された領域内において明るさが極大となる部分を特定し、当該部分の法線方向を決定するステップと、決定した法線方向と、既知の半径と、明るさが極大となる部分の位置と、対応する高さ情報とから、検出対象物の中心位置を決定するステップとを含む。
(もっと読む)
形状計測装置及び形状計測方法
【課題】二次元平面を構成する基準面を複数用いて物体の三次元形状を計測する形状計測装置及び形状計測方法を提供する。
【解決手段】本発明の形状計測装置100は、物体を照射する第1の光源20と、物体を照射する第2の光源30と、物体を撮像するための複数の画素を有するカメラ10と、第1の光源20及び第2の光源30の各々で得られる画素毎の輝度比を各基準面の高さと対応付けた画素毎の画素別輝度比・三次元座標変換テーブルを予め保持するメモリ70と、物体を撮像して得られるそれぞれの画像信号の画素毎の輝度比を算出し、該輝度比の値から画素別輝度比・三次元座標変換テーブルを参照して当該物体の三次元座標を決定する制御ユニット50とを備える。
(もっと読む)
3次元形状測定方法および基板検査方法
【課題】3次元形状測定装置および測定方法を提供すること。
【解決手段】3次元形状測定方法は、測定対象物の第1測定領域で第1画像を撮影する段階と、第1中央処理ユニットを通じて前記第1画像を演算処理し、前記第1測定領域での3次元形状を算出する段階と、前記第1中央処理ユニットが前記第1画像を演算処理する間に、前記測定対象物の第2測定領域で第2画像を撮影する段階と、第2中央処理ユニットを通じて前記第2画像を演算処理し、前記第2測定領域での3次元形状を算出する段階と、を含む。これにより、3次元形状の測定時間を短縮させることができる。
(もっと読む)
変位・ひずみ分布計測光学系と計測手法
【課題】安価で小型の変位・ひずみ分布計測光学系と計測手段を提供すること。
【解決手段】複数の撮像素子を使用することで、光学素子の数を減らし、2次元の変位・ひずみ分布計測を行うことができる装置を小型にすることができる。さらに、計測対象物の近傍に鏡を設置することにより、撮像素子の数を減らし、さらに小型の装置とすることができる。
(もっと読む)
計測装置、検査装置及び計測方法
【課題】高速に搬送される計測対象の物体の3次元形状計測を高精度に行う。
【解決手段】プロジェクタ2は、Y軸方向に並ぶ明暗ピッチによりコード化されたスリットパターンがX軸方向に複数配列され、Y位置が同じビットデータを各スリットパターンから抽出してX軸方向に沿って並べたときのビット列の値がY軸方向に沿って線形に変化するように各スリットパターンがコード化されたスリットパターン像を、物体Mの搬送経路上に投影する。撮像装置3は、物体MがX軸方向に搬送されスリットパターン像を通過する様子を、プロジェクタ2とは異なる角度から撮像する。コード生成部6は、撮像された動画像に基づいて、物体M上における計測対象の位置が、各スリットパターンにそれぞれ到達したときの明暗をコード化する。高さ算出部7は、コード化されたコードに基づいて、計測対象の位置の高さを算出する。
(もっと読む)
回折光学素子及び計測装置
【課題】均一な光量分布の回折パターンが得られる回折光学素子を提供する。
【解決手段】複数の基本ユニットが2次元的に配列されており、入射する光に対して2次元的な回折光を発生させる回折光学素子であって、前記回折光を平面上に投影させることにより、前記平面上の所定の範囲内に複数の光スポットを発生させるものであり、前記所定の範囲を4角形とした場合、前記所定の範囲を略同一形状となるNx×Ny個以上の領域に均等に分割し、前記分割された領域のうち、前記所定の範囲の中心領域における領域の前記光スポットの数をMcとし、前記所定の範囲の4隅における領域の前記光スポットの数の平均をMoとし、前記所定の範囲に照射される最大の回折角度をθdとした場合に、Nx及びNyはともに3以上の奇数であって、15°≦θd、Mo/Mc>−0.02173×θd+1.314であることを特徴とする回折光学素子を提供することにより上記課題を解決する。
(もっと読む)
形状計測装置
【課題】計測対象物体の形状を高速かつ高精度に計測する装置を提供する。
【解決手段】計測対象物体21の形状を計測する装置であって、光源用基板32と、該光源用基板32上に配置された複数の格子投影用LED33とを有する格子投影用光源31と、1次元格子が描かれた格子面を含む、光源用基板32に平行に配置された格子プレート34とを有する格子投影部30と、1次元格子が投影された計測対象物体21を撮影する撮影部11と、撮影された画像に対して位相解析処理を施して、計測対象物体21の形状を求める解析制御装置12とを備え、複数の格子投影用LED32の各々の光軸が、光源用基板32の法線に対して、計測対象物体21側に傾斜していることを特徴とする。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】移動体を精度良く駆動する。
【解決手段】 ウエハWを保持し所定面内で移動するウエハステージWSTと、所定面内と実質的に平行に配置される移動スケール44A〜44Dに、複数のヘッド48a〜48kを介してそれぞれ所定平面と交差する方向からビームを照射して、ウエハステージWSTの位置情報を計測するエンコーダシステムと、エンコーダシステムの計測情報に基づいてウエハステージWSTを制御する制御システムによって、複数のヘッド48a〜48kのうち移動スケール44A〜44Dと対向する複数のヘッド48a〜48kの数が変化するとともに、ウエハステージWSTの移動によって、複数のヘッド48a〜48kのうち位置情報の計測に用いられるヘッドが別のヘッドに切り換わる。
(もっと読む)
1 - 20 / 194
[ Back to top ]