
Fターム[3E054EA01]の内容
包装位置への供給−物品の供給 (7,769) | 供給態様(連続、間欠) (457) | 連続供給 (303)
Fターム[3E054EA01]の下位に属するFターム
間欠供給化 (123)
Fターム[3E054EA01]に分類される特許
21 - 40 / 180
難保形性食用油脂製品の供給装置及び供給方法
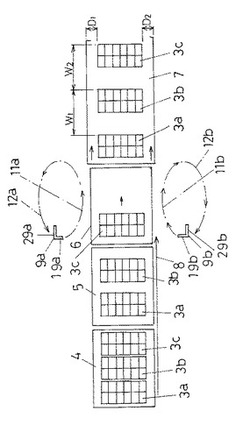
【課題】板状の難保形性食用油脂製品がベルトコンベアを介して、包装機に位置精度よく連続的に移載する難保形性食用油脂製品の供給装置や供給方法を提供する。
【解決手段】難保形性食用油脂製品3を当該複数のベルトコンベア装置4、5、6によって、前記包装機に供給する供給装置であって、切断機によって切断されていて、前記ベルトコンベア装置4、5によって搬送されてきた前記難保形性食用油脂製品の位置調整が行われる位置調整用のベルトコンベア装置6が前記包装機の直前に配備されていると共に、当該位置調整用のベルトコンベア装置6によって、前記包装機7の方向に向けて搬送される前記難保形性食用油脂製品3を、前記包装機7に搭載されている包装シート上に、所定の向き及び位置と、所定の間隔で供給する、移載位置補正機構が当該位置調整用のベルトコンベア装置6に付設されている難保形性食用油脂製品の供給装置と供給方法。
(もっと読む)
カートナー

【課題】不定形で扁平な物品を積み重ねた集積体を安定した状態で確実に箱詰めすることができるカートナーを提供する。
【解決手段】マスク等の扁平な物品を1枚づつ包装した不定形で扁平な軽量のピロー包装体を積み重ねた集積体PGを物品搬送経路上の供給位置αに供給する物品供給手段10と、供給位置αに供給された集積体PGを物品搬送経路に沿って搬送する物品搬送手段20と、胴部を筒状に開口したカートンCを挿入領域βに搬送するカートン搬送手段30と、集積体PGを物品搬送手段20によって搬送しながら物品搬送経路上の挿入領域βでカートンCに挿入する物品挿入手段40とを備えている。物品挿入手段40は、集積体PGを物品搬送経路の側方に押し出すプッシャ44と、挿入領域βで集積体PGを上方から押える押え手段48とを有し、押え手段48によって集積体PGを上方から押えながら、プッシャ44によって側方に押し出すようになっている。
(もっと読む)
供給装置
【課題】適切なタイミングで物品を供給する。
【解決手段】供給装置10は、冷菓XA1を搬送するバケットコンベア2の搬送面3aの上方に、バケットコンベア2の流れ方向と交差するように配置される環状の第一のベルト13と、この第一のベルト13からバケットコンベア2の搬送面3aに突出するように設けられ、第一のベルト13が走行することによって、バケットコンベア2の搬送面3a上の冷菓XA1を押し進める押し部材16と、を備えている。第一のベルト13は、バケットコンベア2の下流側に近付く方向で、かつバケットコンベア2の搬送面3aの側方に配置されるフィンガーコンベア4の方向に傾けた方向に走行する進行領域13aを有する。
(もっと読む)
搬送装置および方法
【課題】物品から屑が発生し蓄積することを防止する。
【解決手段】搬送装置10は、屑が発生する2個の焼き菓子XA1を、流れの幅方向に並べた状態で上流から下流に向かって押し進めるフィンガー11と、このフィンガー11の下方に配置されて焼き菓子XA1を下側から支持するプレート21と、を備えている。プレート21は、搬送面21として機能し、流れの幅方向の外側から内側に向かって下方に傾斜するように設定されている。
(もっと読む)
搬送装置及びそれを用いた包装機
【課題】 不安定な被包装物であっても、位置ずれを起こさずに確実に搬送すること
【解決手段】 搬送面上に、被包装物8の供給区間Kから下流側に至るまでサイドコンベア装置14を配置する。サイドコンベア装置は、水平平面内で回転するエンドレスベルト20の外周面に多数の羽部21を設ける。図示した供給区間で対向するベルト面間の距離が離れた開状態では羽部は被包装物に接触せず、供給ロボットに保持された被包装物はスムーズにその位置に挿入でき、そのまま前進移動させ搬送装置の搬送速度と同期をとる。この前進移動に合わせて、テンションローラ32,第2アイドルプーリ34を前進移動させて供給区間を下流側に延長し、供給ロボットによる被包装物の前進移動を許容しつつ、前回供給された被包装物(白丸)を支持した状態を維持する。その後、テンションローラ32や従動プーリ15′を中央に移動して供給区間にある羽部で供給された被包装物を支持する。
(もっと読む)
ボトル回転装置およびボトル回転装置を備えるボトル搬送装置
【課題】簡素な構造であって工程を増加させることなくボトルを確実に回動できるボトル回転装置およびボトル回転装置を備えるボトル搬送装置を提供する。
【解決手段】ボトル回転装置12およびボトル回転装置12を備えるボトル搬送装置10は、搬送方向の上流側から下流側に延びる一対のベルト16,17と、一対のベルト16,17を、速度偏差を有して駆動する駆動部とを備え、一対のベルト16,17は、ボトル1に有するネックリング8を吊り下げるための掛止部21,22を互いの対向位置に有する。
(もっと読む)
搬送装置
【課題】物品から発生した屑が搬送面の隅に蓄積することを防止する。
【解決手段】搬送装置10は、上流から下流に向かって焼き菓子XA1を押し進めるフィンガー11と、このフィンガー11の下方に配置されて焼き菓子XA1を下側から支持する搬送面25aを有してなり、搬送面25aの幅が焼き菓子XA1の幅と比較して狭く設定された状態で配置されるカバー25と、このカバー25との間に、焼き菓子XA1から発生する屑を落下させる隙間hを形成するように搬送面25aの側方に沿って設けられたサイドガイド26,32と、を備えている。
(もっと読む)
鶏卵整列装置
【課題】鶏卵の損傷を防ぎながら、均等な間隔で整列させることができる鶏卵整列装置を提供する。
【解決手段】本発明に係る鶏卵整列装置は、X方向へ鶏卵Eを搬送する搬送部1と、鶏卵Eを搬送部1の幅方向へ分散しながら停留させる停留部2と、停留部2の下流側に隣接し、搬送部1の幅方向に均等な間隔となるように鶏卵Eを案内する案内部3と、案内部3が案内する間隔と同じ間隔で鶏卵Eを整列させる整列仕切部4とを備えている。鶏卵Eは、案内部3によって整列仕切部4の上流側先端に直接接触しないように案内されるので、鶏卵Eの損傷や、整列仕切部4で形成された通路の入り口に鶏卵Eが重なり合って詰まることを防げる。また、鶏卵Eは、停留部2によって搬送部1の幅方向へ分散されるので、整列仕切部4で形成された複数の通路に偏りなく鶏卵Eを整列させることができる。
(もっと読む)
集積供給システム
【課題】物品の形状や包装態様に関係なく、包装機に物品を供給できる集積供給システムを提供する。
【解決手段】集積供給システム12は、複数の物品XA1を外包機11に向けて搬送するベルトコンベア14と、ベルトコンベア14と協働するアームコンベア15と、物品XA1を外包機11に向けてガイドするガイドユニット16と、等を備えている。ガイドユニット16は、ベルトコンベア14のベルト33上に通路を形成する一対の外側ガイド部材46,47と、外側ガイド部材46,47に形成される通路を仕切って複数の小通路に分割する中間ガイド部材48〜52と、等を備えている。外側ガイド部材46,47は、外包機11に向かうに連れて互いの間隔が狭小となるようにベルトコンベア14の筐体45に取り付けられる。アームコンベア15は、ベルトコンベア14と共に、ベルト33に置かれた物品XA1を搬送するアーム57等を備えている。
(もっと読む)
物品ハンドリング装置
【課題】物品を順次搬入する物品搬入コンベアから物品を取り上げ、物品受け止め部に積み込むという作業を能率良く遂行することができる物品ハンドリング装置を提供する。
【解決手段】物品ハンドリング装置10において、複数の物品1を順次搬入する物品搬入コンベア11から、移載ロボット12の第1ピッキングヘッド13と第2ピッキングヘッド14が交互に物品1を1個ずつ吸着し、第1物品受け止め部16または第2物品受け止め部17に積み込む。第1ピッキングヘッド13と第2ピッキングヘッド14を独立して三次元移動させる制御装置15は、第1ピッキングヘッド13と第2ピッキングヘッド14の一方が物品搬入コンベア11から物品受け止め部16、17に向かい、他方が物品受け止め部16、17から物品搬入コンベア11に向かうとき、相互を安全距離に保つ。
(もっと読む)
搬送装置
【課題】物品群の前後端を効率よく揃えて当該物品群を搬送する搬送装置を提供する。
【解決手段】物品群Zを搬送する搬送装置1であって、物品群Zが滑動するシュート2と、シュート2の下方端に近接配置され、滑動した物品群Zが載置される載置台3と、載置台3の上方に配置されるコンベヤ4と、を備え、コンベヤ4は、載置台3上における物品群Zの搬送方向後端を押圧搬送可能な搬送片54を所定間隔で複数配設した無端索体51、及び、無端索体51を回転させる駆動手段6aを有する無端搬送手段を備えており、搬送片54は、シュート2の滑動面21上において物品群Zを受け止めて該物品群Zの搬送方向前端を揃えることを特徴とする搬送装置1。
(もっと読む)
搬送装置
【課題】大小二個の物品を重ねてセットにした状態で包装する場合であって、包装機で包装材料を切り離したりシールしたりする際に、物品の噛込みが生じることを防止する搬送装置を提供する。
【解決手段】搬送装置11は、第一および第二の物品XA1,XA2を重ねてセットにした状態で包装機14に順次供給する供給路15と、この供給路15の下方に沿って配置され、循環するように走行する第一および第二のチェーン16,17と、所定の間隔で第一のチェーン16に連結され、供給路15を走行することで供給路15に投入された第一の物品XA1を押し進める複数の第一のフィンガー25と、所定の間隔で第二のチェーン17に連結され、第一のフィンガー25に後続して供給路15を走行することで供給路15に投入された第二の物品XA2を押し進める複数の第二のフィンガー26と、を備えている。
(もっと読む)
選果システム
【課題】表面が柔らかい青果物でも容易に箱詰めできる選果システムを提供する。
【解決手段】青果物6を載置した載置台5を上流側から下流側に搬送する主搬送手段が備えられ、主搬送手段には上流側から青果物6を載置台5上に載せる載置工程と、前記青果物6の品質を測定する品質計測工程と、前記品質計測工程の測定結果から等級や階級別に青果物6を選別してパック詰めするパック詰め工程とが設けられる選果システムにおいて、パック詰め工程は、主搬送手段の下流部で等級や階級別に分岐して搬送する複数の選別ライン30が設けられ、各選別ライン30の側方には、載置台5上に載置された青果物6のがく片側を吸着してパック48まで搬送し、整列させて吸着を解除してパック48内に詰めるパック詰めロボット33を備えるものとする。
(もっと読む)
物品分離装置
【課題】物品を連続して搬送しながら、物品を傷めることなく、後続の物品から分離させる物品分離装置を提供する。
【解決手段】物品を列をなした状態で搬送する搬送コンベヤ手段10と、先頭の物品に当接係合する係合部材51と、係合部材を移動させる係合部材駆動手段50と、隣接する物品同士間に進入そして脱出する分離部材31と、分離部材を移動させる分離部材駆動手段30を備え、係合部材駆動手段50が係合部材を先頭の物品P1の前面に当接した状態で前進せしめ、かかる状態で分離部材駆動手段30が分離部材を物品間に入り込ませて物品の搬送速度より遅い速度で前進移動させると共に、係合部材駆動手段50は、係合部材を先頭の物品P1の前面への当接を解除した後に、分離部材31が入り込んでいる物品P1,P2間に進入せしめ、分離部材31の移動速度より速い速度で係合部材を前進させて物品P1を前方へ押し出し、後続の物品P2から分離させる。
(もっと読む)
搬送装置
【課題】物品を整列させて定量ずつ送り出す際に、物品が脆弱性を有していても変形させることはなく、かつ、搬送時間を短縮して搬送効率を向上させる。
【解決手段】搬送装置1は、整列ステージ2と、送り出しステージ3とを備えている。整列ステージ2は、供給された複数の物品を整列させる。送り出しステージ3は、整列ステージ2から供給される物品が載置され、回動することで載置された物品を送り出す回動テーブル21と、回動テーブル21に載置された物品の進路を閉鎖し、回動テーブル21が物品を送り出すときに物品の進路を開放するシャッタ24とを有する。そして、送り出しステージ3の回動テーブル21は、載置された物品を送り出すときに、整列ステージ側の端部31bによって整列ステージ2から供給される物品の移動を規制する。
(もっと読む)
包装装置
【課題】粒状物が2本の原反間の所期の位置に挟み込まれるようにして包装することができるようにした包装装置を提供する。
【解決手段】粒状物を挟み込むための凹部11aが少なくとも一方のローラ11,12の外周面に設けられ、重なり合いつつある2本の原反1,2間に粒状物を案内するシュートパイプ20が一対のローラ11,12の上流側に配備されている。ローラ11,12に設けられた凹部11aを目掛けてシュートパイプ20から粒状物を噴出させる。粒状物を1個ずつ入れる窪み部61,61,…を外周面に複数設けた排出側の回転ドラム(第2のドラム)60がシュートパイプ20の上流端に配備されている。窪み部61,61,…に空気を噴射することにより、粒状物が窪み部61,61,…内からシュートパイプ20内に一定の間隔を空けて噴出する噴射手段64が備えられている。
(もっと読む)
姿勢調整装置
【解決課題】複数のPTPシートが集積された集積品の姿勢調整を正確に、しかも簡易におこなうことのできる姿勢調整装置を提供する。
【解決手段】姿勢調整装置10は、複数のPTPシートが集積された集積品60を、一定の供給方向Xに従って供給する供給手段20と、供給手段20の前方に配設され、表側に吸着面32が形成された調整板30と、調整板30に穿設された吸引孔42を有する吸引部40と、を備える。集積品60の一の側部が、側部に表れるPTPシートのポケット部を介して、吸引部40により吸引されるとともに、側部が吸着面32に吸着されることで、集積品60の姿勢調整がおこなわれる。
(もっと読む)
横形製袋充填機における物品供給装置
【課題】饅頭等の軟質で表面が損傷し易い物品であっても、物品を損傷したり変形することなく製袋手段で成形されるフィルムの収容領域の幅中央に向けて供給する。
【解決手段】ベルトコンベヤ12が配設された移動フレーム28は、機枠26に対して上流側で回動軸30を介して水平回動可能に支持される。機枠26に配設した調節モータ36で作動される調節機構38が移動フレーム28に連繋される。ベルトコンベヤ12の搬送終端近傍に、ベルトコンベヤ12で搬送される物品10の左右方向の載置位置を検出する第1センサ42が配設される。制御手段は、ベルトコンベヤ12の基準位置に対する現在の回動角度と、第1センサ42で検出された物品10の載置位置との関係から調節モータ36を駆動制御し、ベルトコンベヤ12の搬送終端を、物品10を筒状フィルムFの収容領域の幅中央に送り込む位置に向けて変位させる。
(もっと読む)
パン搬送装置及びパン包装システム
【課題】パンの搬送先の所定位置にパンを正確に載置できる簡易な構成のパン搬送装置及び、当該パン搬送装置によりパン包装装置のスクープの所定位置にパンを確実に載置することができるパン包装システムを提供すること。
【解決手段】パンが搬送される搬送経路に沿って離間配置され回転可能な一対の転動体と、前記一対の転動体に巻回され、前記搬送経路に沿って配置される無端回動体と、前記無端回動体に装着され、前記搬送経路に沿って前記パンを付勢し、前記パンを所定位置へ搬送する第1のフライトと、前記搬送経路に沿って前記第1のフライトの上流側で前記無端回動体に装着され、前記所定位置に前記パンを整合させるように前記パンを付勢する第2のフライトと、を備えるパン搬送装置及び当該パン搬送装置を備えるパン包装システム。
(もっと読む)
錠剤カセット
【課題】払い出す錠剤の大きさに応じて仕切部材の上下位置及び進入深さを簡単に調整する。また、駆動軸に固定された固定部材からロータを簡単に取り外す。
【解決手段】カセット本体2の側壁に、少なくとも1本の弾性髭39が貫通するスリット27をロータ3の軸方向に延びるようにロータ3の周方向に複数形成する。カセット本体2の側壁にロータ3の外周面と向かい合う開口部11を形成し、開口部を閉塞部材17で閉塞し、閉塞部材にスリット27を形成する。仕切部材19をロータ3の径方向に移動可能に保持する保持部材18を設け、閉塞部材17に保持部材18を支持する支持部23を設ける。仕切部材19に係止突条37を形成し、保持部材18に係止部37に係止し、ロータの径方向の適宜位置で位置決め可能な被係止溝31を形成する。
(もっと読む)
21 - 40 / 180
[ Back to top ]