
Fターム[3E054GA01]の内容
包装位置への供給−物品の供給 (7,769) | 検知、制御(検知対象、位置) (298) | 物品 (174)
Fターム[3E054GA01]に分類される特許
81 - 100 / 174
海苔束90度回転・整列方法及び装置
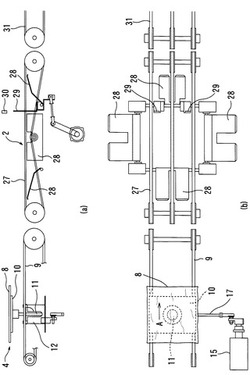
【課題】簡単な構造で海苔束90度回転動作と整列動作の速度を上げて高速処理に対応する。
【解決手段】集束装置から落下した海苔束8を受けて90度回転する受け板10と、上死点から下降する受け板10から90度向きを変えた海苔束8の積載時に停止し、載置後に始動して搬出する第1の搬送コンベヤ9を備えた海苔束90度回転装置と、搬送コンベア9で搬出される海苔束8を搬送し、整列時に停止し、整列後に海苔束を搬出する第2の搬送コンベヤ27と、進入する海苔束8を停止させるストッパ29と、海苔束8を叩いて整列する揃え板28と、進入してくる海苔束8を検知する進入センサ30を備えた整列装置と、第1の搬送コンベア9及び受け板10の停止動作及び始動動作の開始時間を計時する第1のタイマと第2の搬送コンベア27、ストッパ29及び揃え板28の停止動作及び始動動作の開始時間を計時する第2のタイマを備える。
(もっと読む)
枕状包装袋の把持装置

【課題】 枕状包装袋を安定把持すること。
【解決手段】 枕状包装袋1の把持装置40であって、相対する把持バー41により、枕状包装袋1の正面視で硬質上シール部1Aの下部に位置する、軟質の両側縁部1Dを側方から押し込み把持可能にするもの。
(もっと読む)
肉部位の真空包装方法及びその装置
【課題】豚肉は5種類の部位で成り立つが、この内の小型の2種類の部位をまとめて1種類とし、総計4種類の部位を4本のコンベヤラインで搬送して真空包装する場合の、前記小型2種類の部位の、一体化による能率低下を改善する。
【解決手段】前記小型2種類の部位を搬送する第4コンベヤラインにおいて、移送中の前後の部位の間隔を遅延検出センサーで検出し、移送中の前位の部位に対する後位の部位の遅れを、高速運搬付加手段でもって加速修正して両部位を一体化して包袋に送り込み、他の3種類の部位の包装能率に対する遅れを少なくする。
(もっと読む)
卵用トレイを安定化させる方法及びシステム
この発明は、トレイ(2)に卵を配置する自動化された方法に関するものであって、トレイのセルにおける卵の有無を自動的に検知し、供給先から卵を持ち上げてトレイの空のセルにそれを配置することを有する。また、この発明は安定化トレイ(2)に卵を配置するシステム及びその方法に関し、トレイは、卵が配置される等間隔に配されたセルを有し、1つ以上のセルに卵がされていないと予期されており、この情報が情報処理ユニットに記憶されているシステムであって、当該システムは、卵ピックアップヘッド(7)を備える、供給トレイ(5)から1個以上の卵を持ち上げ、安定化トレイ(2)の空のセルに配置するように、情報処理ユニットによって駆動されるロボットからなる手段(6)を有している。 (もっと読む)
錠剤充填装置及びPTP包装機
【課題】非円形状の錠剤を容器フィルムのポケット部内へと正しい姿勢で充填させることのできる錠剤充填装置及びPTP包装機を提供する。
【解決手段】容器フィルムのポケット部に対し、外周面に少なくとも三つの角状部を有する非円形状の錠剤5を充填するための錠剤充填装置23は、外周に沿って所定間隔毎に収容凹部32が形成されたロータリドラム31と、ロータリドラム31の上部近傍に設けられ、錠剤5を一錠ずつ収容凹部32に供給可能な錠剤供給シュート41とを備えている。収容凹部32は、錠剤供給シュート41から供給された錠剤5の姿勢を所定の準備姿勢となるように矯正する土手部51と、土手部51において準備姿勢とされた錠剤5の姿勢を、ポケット部に充填するときの正しい姿勢である充填姿勢となるように矯正する矯正壁部55とを備えている。
(もっと読む)
把持装置、並びに把持装置を備える整列装置、収容装置および把持方法
【課題】把持対象の上方の位置に配置しても、その端部を表裏の側から挟持可能な把持装置を提供する。
【解決手段】このハンド(把持装置)30は、一対をなす第一の把持面31aおよび第二の把持面32aでシート部材(把持対象)2を挟持するものである。そして、その第二の把持面32aは、シート部材2の外縁部2tよりも外側の位置から内側の位置にかけて旋回されるようになっており、さらに、自身の旋回円S2に対し、前記内側の位置では、その径方向にシート部材2を挟持するように第一の把持面31aに対向するとともに、前記外側の位置では、径方向で第一の把持面31aに重なりあわない待避位置に位置するようになっている。
(もっと読む)
ストロー付き容器の整列搬送装置
【課題】酒、ワイン、牛乳、ジュース、コーヒー、お茶等の液体内容物を収納する円柱形状または円錐形状等の容器の外側面にストロー等が付着されているストロー付き容器を搬送中に一定の向きに整列させるストロー付き容器の定位置整列搬送装置に関する。
【解決手段】
ストロー付き容器を所定間隔で連続的に垂直方向に載置し搬送する直線状の搬送コンベアーと、搬送コンベアーの左右両側のいずれか一方に搬送コンベアーと走行するサイドベルトコンベアーと、他方に矯正固定ガイドとを具備しているストロー付き容器の整列搬送装置であって、
サイドベルトコンベアーと矯正固定ガイドとによってストロー付き容器の側面を挟み回転させ、容器のストロー部がサイドベルトコンベアーで停止して、定位置に整列させることを特徴とするストロー付き容器の整列搬送装置。
(もっと読む)
被搬送物の移載装置及び被搬送物の移載システム
【課題】製造ラインを複数列で搬送される複数の被搬送物(ワーク)が連続しないで抜けが生じて搬送されても、このワークを移載したラインでは、ワークが抜けることなくすべて積載された状態で搬送することができるようにした被搬送物の移載装置を提供する。
【解決手段】搬送ラインLの下流端から各列上のワークWを個々に搬送するリードコンベア10aを並列したリード搬送手段10と、リードコンベア10aと第1のラインX又は第2のラインYとに架け渡される第1、第2のシフトコンベア20x,20yを有し、少なくとも1本のリードコンベア10aに共通して架け渡される前記第1、第2の両シフトコンベア20x,20yを振分けコンベアとする。各シフトコンベア20x,20yと第1、第2の各ラインX,Yとの間に、ワークWを一旦ストックしてから各ラインX,Y上に落下させる開閉部31を複数段重ねた多段調整手段30が配置されている。
(もっと読む)
包装システムならびにその制御方法
【課題】後処理装置22が停止しても良品のPTPシート1を系外に排出する必要がなく、かつ、包装システム10を停止してもポケット2に収容された内容物5が熱による劣化を生じない包装システム10を提供する。
【解決手段】基材シート6に形成されたポケット2に内容物5を充填する充填装置14と、シート状の蓋材4を基材シート6に熱圧着してポケット2の開口部を閉塞する蓋取付装置18と、基材シート6および蓋材4の接合体からPTPシート1を打ち抜く打抜装置20と、PTPシート1を後処理装置22へ向けて搬送する搬送装置24とを備える包装システム10に対して、さらに、後処理装置22が停止したときに後処理装置22に代わってPTPシート1を受け入れるバッファ装置32を搬送装置24の下流側に配設することにより上記課題を解決することができる。
(もっと読む)
PTP段積み装置
【課題】ピロー包装の前工程でPTPを段積みするPTP段積み装置において、様々な段積み数に対応できるとともに、段取り替えの容易なものを提供する。
【解決手段】PTP段積み装置1は、PTP100を搬送する第1主コンベア11と第2主コンベア12、第2主コンベア12に並走する副コンベア13、第1主コンベア11、第2主コンベア12、及び副コンベア13の末端に一部が近接配置された段積み用コンベア14、第2主コンベア12上のPTP100を上下反転して副コンベア13に載置する反転移載装置20、及び、第1主コンベア11と第2主コンベア12の上に上下反転無しの状態で存在するPTP100と、副コンベア13上の上下反転有りのPTP100を所定の段積み順序で段積み用コンベア14の第1群のバケット15aまたは第2群のバケット15bに積み上げるロボット30を備える。
(もっと読む)
整列コンベア用供給装置及びその運転方法、並びに箱詰め装置。
【課題】無端軌道に載っている物品の回転角度を正確に判断することができ、かつ正確な回転角度の判断を比較的低コストで実現できる整列コンベア用供給装置の運転方法、及びその運転方法を利用した整列コンベア用供給装置及び箱詰め装置を提供する。
【解決手段】本発明の整列コンベア用供給装置の運転方法は、無端軌道204と、無端軌道204の上方に配設された二次元コード読み取り装置202と、二次元コード読み取り装置202と通信可能に構成された制御装置30と、を有し、二次元コード読み取り装置202が無端軌道204によって搬送される物品Wの上面に表示されている二次元コードQの読み取り角度を取得する角度取得ステップと、制御装置30が読み取り角度を二次元コード読み取り装置202から取得して読み取り角度に基づいて物品Wの回転角度を算出する回転角度算出ステップと、を有する。
(もっと読む)
箱詰装置
【課題】 本発明は、個別の袋を複数集積して一群とし、その一群の袋を規定サイズの箱に詰める箱詰装置において、袋の厚みの偏りによる不都合に対応することを目的とする。
【解決手段】 個別の袋を複数集積して一群とし、その一群の袋を規定サイズの箱に繰り返し詰める箱詰装置であって、前記各個別の袋の厚みを検出する厚み検出手段と、前記一群の袋について、前記厚み検出手段より検出される前記各個別の袋の厚みを加算し、または前記厚み検出手段より検出される前記各個別の袋の厚みを所定値から減算する演算手段と、を備えることを特徴とする。
(もっと読む)
筒状容器の方向規制装置
【課題】簡単な構成により筒状容器の周方向位置を一定方向に的確に揃えることができる小型で安価な筒状容器の方向規制装置を提供する。
【解決手段】筒状容器の方向規制装置1は、方向規制手段3が、複数の係合突起を外周に有し駆動モータ8で回転される駆動プーリ19と従動プーリ23とに巻き掛けた回転ベルト7と、筒状容器Bを接触させて案内する案内部材9とを備え、回転ベルト7と案内部材9が、コンベヤ2の搬送方向aに対して所定傾斜角度θで傾斜されてコンベヤ2の上方に配置され、それらのコンベヤ2の搬送方向aにおける下流側端部が、筒状容器Bを下流側へ1つずつ通過させる位置に設定され、筒状容器Bが、搬送されて案内部材9に接触して回転した後、その突起と回転ベルト7の係合突起が係合して周方向に位置決めされ、回転ベルト7により前記下流側端部へと移動される構成とされている。
(もっと読む)
箱詰装置
【課題】本発明は、個別の袋を複数集積して一群とし、その一群の袋を規定サイズの箱に詰める箱詰装置において、袋の厚みの偏りによる不都合に対応することを目的とする。
【解決手段】個別の袋を複数集積して一群とし、その一群の袋を規定サイズの箱に繰り返し詰める箱詰装置であって、前記各個別の袋の厚みを検出する厚み検出手段と、前記検出手段により検出される厚みに基づいて、前記一群の袋を前記規定サイズの箱に詰めることの適否を判断する判断手段と、記判断手段によって不適と判断される場合に、前記一群の袋のうち交換すべき袋を選択する選択手段と、を備えることを特徴とする。
(もっと読む)
球形農作物の包装装置
【課題】 投入口に挿入された球形農作物を包装シートで包み込んで封止する包装装置本体に、所定の取出し位置に供給された球形農作物を掴み上げて包装装置本体の投入口に送り込む移載装置に、取出し位置の球形農作物を掴み上げて投入口の直上にまで移動する把持機構を備え、把持機構の中心に、球形農作物を上方から押圧して投入口に送り込む押出し具を上下作動可能に装備した球形農作物の包装装置において、球形農作物を投入口へ安定した姿勢で送り込み、包装シートで好適に包み込むことができるようにする。
【解決手段】 押出し具72に、把持された球形農作物wにおける上向きの切り口を取り囲むように弾性接触する押圧部82を下向きに突出して備えるとともに、この押圧部82を、球形農作物wの径方向に幅狭で周方向に幅広く形成してある。好ましくは、押圧部82を、下端側ほど把持機構30の中心に近づくよう内向きに傾斜しておく。
(もっと読む)
物品箱詰め装置
【課題】 従来の物品箱詰め装置は、物品を定位置で積層するのに、簡単な構成で、処理スピードが速く、且つきれいに整列させた状態で積層できるものはなかった。
【解決手段】 コンベア装置1で順次搬送されてくる平面視矩形で薄形の物品Yをコンベア終端部1aから順次無停止状態で送出して、各物品Yをコンベア終端部1aの下方で待ち受ける収納箱X内に所定個数だけ積層状態で収納し得るようにした物品箱詰め装置において、コンベア終端部1aに、該コンベア終端部から送出される物品Yを乗り越させて減速させた後、表裏反転させて落下させるための物品減速反転部材2を取付けていることにより、物品Yを収納箱X内に、簡単な構成で、処理スピードが速く、且つきれいに整列状態で収納・積層できるようにした。
(もっと読む)
球形農作物の包装装置
【課題】 上向きの投入口に挿入供給された球形農作物を包装シートでくるんで封止するよう構成した包装装置本体に、球形農作物を載置保持する複数の受け部が循環回動される搬送装置を装備するとともに、前記搬送装置で所定位置まで搬送されてき球形農作物を掴み上げて包装装置本体の前記投入口に送り込む移載装置を包装装置本体の上部に配備した球形農作物の包装装置において、移載装置に邪魔されることなく包装装置本体の点検整備を容易に行えるようにする。
【解決手段】 移載装置3を支点p周りに回動可能に支持し、移載装置3が包装装置本体1の上方に位置する移載作動状態と、移載装置3が包装装置本体1の上方から外れた退避状態とに切換え可能に構成してある。
(もっと読む)
球形農作物の包装装置
【課題】 上向きの投入口に挿入供給された球形農作物を包装シートで包み込んで封止するよう構成した包装装置本体に、所定の取出し位置に供給された球形農作物を掴み上げて包装装置本体の前記投入口に送り込む移載装置を配備し、この移載装置に、前記取出し位置の球形農作物を掴み上げて前記投入口の直上にまで移動する把持機構を備えるとともに、把持機構の中心に、球形農作物を上方から押圧して投入口に送り込む押出し具を上下作動可能に装備した球形農作物の包装装置において、押出し具による過剰な押圧による球形農作物の姿勢や位置の変化を抑える。
【解決手段】 押出し具72を自由上下動可能に支持し、把持機構30が投入口の上方から外れている状態では押出し具72を上方退避位置に強制移動させ、把持機構30が投入口の上方に位置すると押出し具72を自重下降状態に切換える押出し具操作手段を備えてある。
(もっと読む)
箱詰め装置及び箱詰め方法
【課題】物品群の保持への床の開閉動作の影響を排除することによって、箱詰め作業のトラブルを抑制する箱詰め装置及び箱詰め方法を提供する。
【解決手段】物品を整列させてなる物品群を整列方向から挟圧する挟圧ステップS3と、挟圧された物品群が載っている床を開放する開放ステップS7と、挟圧された前記物品群の上面に吸引ヘッドを接触させて物品群の上面を吸引して保持する保持ステップS4と、開放ステップS7後に吸引ヘッドを降下させることによって床の下方の外装箱に物品群を押し込む押し込みステップS8と、を有する、箱詰め方法であって、開放ステップS7の前に吸引ヘッドを物品群が床から離れる程度上昇させた状態とする上昇ステップS5を有する。
(もっと読む)
選果施設
【課題】
フリートレイ式の選果施設において、箱詰め部で果実を取り出した空トレイを循環コンベアに排出しやすくすることを課題とする。
【解決手段】
果実トレイt2から果実fを取り出された空トレイt2を等階級選別コンベア部6の後工程の空トレイ受けコンベア部7の空きスペースに供給する構成にすることで、空トレイ受けコンベア部7はスペースが多く空いているため空トレイ搬送コンベア22から空トレイt2を円滑に供給しやすくすることができる。
(もっと読む)
81 - 100 / 174
[ Back to top ]