
Fターム[4C038VB14]の内容
生体の呼吸・聴力・形態・血液特性等の測定 (31,718) | 測定対象 (4,537) | 人体 (3,247) | 足 (356)
Fターム[4C038VB14]の下位に属するFターム
重心の測定 (76)
Fターム[4C038VB14]に分類される特許
261 - 280 / 280
生理状態推定装置及び方法
【課題】 ノイズ混入時においても生理状態を良好に推定できる生理状態推定装置及び方法を提供する。
【解決手段】 複数の実生理指標から予測生理指標を算出し、実生理指標のいずれにもノイズが含まれないと判定される場合には、生理状態演算モデルとして基準生理状態演算モデルを選択し、実生理指標のいずれかにノイズが含まれると判定される場合には、ノイズ量の少なさに応じて選択される複数の変更生理状態演算モデル候補と、基準生理状態演算モデルに、生理指標予測手段で算出された予測生理指標をそれぞれ入力して、予測変更生理状態と予測基準生理状態をそれぞれ求め、この予測基準生理状態対して相関の高い予測変更生理状態を与える変更生理状態演算モデルを、実生理指標入力用の生理状態演算モデルとして選択する。
(もっと読む)
人体モデルに基づく装着型支援システム

【課題】 本発明は、スポーツやリハビリテーション等に用いる装着型支援システムを提供する。
【解決手段】本発明によれば,人間と床の接触力(床反力)を計測するセンサと、人間の膝や足,膝,腰,腕等の関節角度を計測するセンサシステムから得られる情報を,装着型支援システムの計算機内に構築された人間のモデルに適応し,人間の運動状態における生体情報を推定する。さらに、その推定値に基づき、各関節に装着された駆動装置の駆動モーメントを制御する装着型支援システムを構築できる。
(もっと読む)
リハビリ用姿勢モニタリング方法及びリハビリ用姿勢モニタ
【課題】本発明は、取付対象の各部位の動きに合わせて加速度計及びジャイロの検出レンジを変え、全体形状の小型化及びコストダウンを達成することを目的とする。
【解決手段】本発明によるリハビリ用姿勢モニタ方法及びリハビリ用姿勢モニタは、本体(100)内に設けたX、Y、Z軸加速度計(65a,65b,65c)とX、Y、Z軸ジャイロ(66a,66b,66c)の検出レンジを取付対象(50)の各部位の動きの軸方向に合わせて変え、小型化とコストダウンを達成する方法と構成である。
(もっと読む)
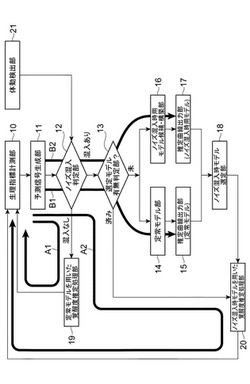
生理状態推定装置及び方法
【課題】 被験者の生理状態を正確に推定することが可能な生理状態推定装置及び方法を提供する。
【解決手段】 覚醒度推定処理部21では、被験者の作業内容に基づく第1生理指標選定部13又は、行動特徴に基づく第2生理指標選定部17のいずれかで選択された複数の生理指標計測部(脳波計測器、心拍計測器、皮膚インピーダンス計測器等)20の出力を基礎とし、被験者生理状態(覚醒度)を演算する。この演算では、覚醒度推定モデル構築部14で生成された覚醒度推定モデルに生理指標が代入され、覚醒度が求められる。覚醒度推定モデルは、第1生理指標選定部13又は第2生理指標選定部17で選択された生理指標計測部20の組合せに応じて選択される。
(もっと読む)
動作分析装置
【課題】 静止時及び運動時の身体動揺を検出、解析、記録し、同時にリハビリテーションも行える安価な装置を提供しようとすること。
【解決手段】 本発明は、回転角速度、加速度、傾斜、方位を検出するセンサからなる姿勢角検出用センサユニットと、超音波送信機、超音波受信機、これら超音波送受信機を制御する制御回路により構成される距離検出部と、検出したデータの演算処理部と、表示部と、被検者に前記ユニットを固定する固定装置とを備えている。このため設置や移動も簡単な小型、軽量かつ低コストの歩行検査装置を実現できる。センサーの数、設置部位により運動機能の測定も可能である。
(もっと読む)
生体のリハビリ用姿勢モニタリング方法及び装置
【課題】本発明は、3軸加速度計及び3軸角速度計から得られた6軸データの静止状態の零点誤差を補正することにより、動作を正確に測定することを目的とする。
【解決手段】本発明による生体のリハビリ用姿勢モニタリング方法及び装置は、姿勢モニタ部(61)に設けた3軸加速度計(65)及び3軸角速度計(66)から得た6軸データ(62)を慣性演算部(63)に入力し、6軸データ(62)の静止状態(M,N)の零点誤差を補正して高精度に生体(50)の動作を測定する方法と構成である。
(もっと読む)
直線型ダイナモメータを用いて角度方向での等運動性測定を得るためのシステムと方法
本発明は、身体の一部分が、任意の角速度で有効回転軸を有する回転或いは曲げ運動を実行している間における該身体の一部分によって行われる運動の等運動性のモーメントの測定を得るための方法である。該方法は、直線経路に沿った予め定められた運動範囲上の等運動性の測定を実行するための直線型ダイナモメータを使用する。まず、前記有効回転軸に対する任意の半径の円に対する略接線方向の直線経路に前記直線型ダイナモメータを配設し、前記直線型ダイナモメータを用いて、前記身体の一部分により加えられる力を測定する。そして、予め定められた直線速度での予め定められた運動範囲にわたって、前記身体の一部分により加えられる力の分布を、前記直線型ダイナモメータを用いて測定する。その後前記力の分布、直線速度及び半径を用いて、前記身体の一部分と対応する角速度により生じたモーメントに対するデータが得られる。  (もっと読む)
(もっと読む)
加速度情報送信装置、身体運動解析装置および身体運動解析方法
【課題】 計測時の制限を緩和しつつ、短時間かつ安価に人の姿勢や運動に関して定量的に解析し得る身体運動解析装置等を提供する。
【解決手段】 装着具2の装着部5は、ベルト状の器具であり、センサユニット10を被験者1の腰部に固定する。センサユニット10の計測部9は、被験者1の状態や運動に伴って生じた加速度を計測する。信号発生部7は、被験者1による歩行開始と停止を表す指示に基づいて、解析対象のデータであることを表す区間特定信号を生成する。通信制御部8は、加速度データに区間特定信号を付加して身体運動解析装置20の通信制御部11に送信する。通信制御部11は、受信したデータに区間特定信号が含まれているか否かを判別し、区間特定信号が含まれている場合は、その区間内の加速度データを運動解析部12に送信する。運動解析部12は、通信制御部11から受信した加速度データを用いて被験者1の運動能力について解析を行う。
(もっと読む)
四肢訓練装置
【課題】 機能回復度、訓練の進捗状況を使用者側が容易に把握でき、指導者側が訓練効果の分析、訓練内容の最適化などが容易にできる、四肢訓練装置を提供すること。
【解決手段】 回転角速度、加速度、傾斜、方位を検出するセンサで構成されるセンサユニット1を、四肢の関節に取り付け、センサユニット1で検出される検出データを付属の演算装置で演算処理し、演算結果を関節の運動機能を視認可能な信号として、付属の表示装置10で表示するとともに、検出データと演算結果を付属の記憶装置9に記録する。これによって、訓練の進捗状況の把握が容易になるので、使用者は訓練に取り組む意欲を維持向上でき、指導者は訓練の進捗状況に応じた適切な指導ができる。
(もっと読む)
随時歩調記憶呼び出し健康補助伴走器
【課題】各人のその時々の歩調を出来るだけ実用可能な伴走出力信号として、随時記憶し歩行と同時に、呼び出すこと。
【解決手段】左足、右足で1つのサイクル運動を行っていることに着目し、歩行中検知器より出力される、左足と右足で1サイクルのデジタル信号を随時マイコンに入力し加算し、その加算された1サイクルの時間巾を2で割って記憶すると、平均の1歩の時間となりその値を随時記憶し歩行と同時に、呼び出すことにより伴走器としての機能が出せる事を特徴とすることが出来た。
(もっと読む)
運動測定方法、運動測定装置及び運動測定プログラム
【課題】関節のトルク等、動物の運動に応じて変動する変数を、当該動物の一連の運動の中で正確に測定し得る方法、システム及びプログラムを提供する。
【解決手段】まず、筋電位と、逆動力学モデルを用いて測定された膝関節トルク(変数)とに基づき、筋電位及び膝関節トルクの関係を表す基準関係式が設定される。そして、その測定された筋電位に基づき、且つ、当該基準関係式に従って膝関節トルクが測定される。例えば、動物が第1及び第2運動を連続的にする場合、まず、第1運動時に測定された筋電位及び第1運動に応じた膝関節トルクに基づいて基準関係式が設定される。そして、第2運動時に測定された筋電位に基づき当該基準関係式に従って第2運動に応じた膝関節トルクが測定される。第1及び第2の運動は任意であり、動物は一定の運動を強要されることはない。
(もっと読む)
外反角測定具、並びにこの機能を備えた下げ札及び収容箱
【課題】 本発明は、消費者が、自らある程度の確実性をもって外反母趾の程度を把握することを可能とし、また、他者に気兼ねすることなく、その程度に適合する履物を選択することを可能とする外反角測定具を提供することを課題とする。
【解決手段】 一対の直線状部位から構成される窪みを備え、頂角部に足の親指の付け根をあてがうようにした外反角測定具であって、所定の外反角に対応して前記一対の直線状部位の屈曲角度が設定されてなることを特徴とする。
(もっと読む)
表皮の解析方法
【課題】OCT計測のデータから、皮膚の層構造を正確に解析できるようにする。
【解決手段】皮膚の所定範囲を光干渉断層撮影法(OCT)で計測し、その干渉信号を明度に変換することにより計測データを画像化し、得られた画像から皮膚の層構造を解析する方法であって、前記画像において、角層よりも深部領域で深さ方向に中間明度領域A5 、暗領域A6 及び明領域A7 が順次観察される場合に、皮膚表面A1 から暗領域A6 の手前までを表皮とする。
(もっと読む)
動作制御式足ユニットのためのシステム及び方法
肢の動きに関連するシステム及び方法。一例では、補装具システム又は矯正具システムのようなシステムは、足ユニットと下肢部材との間の角度を積極的に制御又は調節するアクチュエータを備える。処理モジュールは、センサモジュールから得たデータをもとにアクチュエータの動きを制御する。例えば、検出するモジュールのデータは、使用者の歩行に関連する情報を含み、健常な足首の自然な動きを実質的にまねるように足ユニットを調節するために使用される。さらに、このシステムは、例えば、平地での歩行、階段の上下歩行、傾斜面の上下歩行や使用者の他の種々の動きに対応できる。更に、処理モジュールは、使用者による入力信号を受信したり外部インターフェースにより出力信号を表示してもよい。例えば、処理モジュールは、その使用者による踵の高さの入力を受信してもよい。 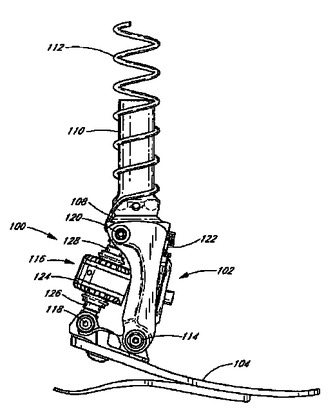 (もっと読む)
(もっと読む)
リハビリテーション並びにトレーニングのための方法及び器械
その上に人間が座ることに適合したシート(105)と、シートに対して動くことに適合した少なくとも一つの伸展装置(230)と、人間のバランス状態の指標を生成する少なくとも一つのセンサ(130)と、少なくとも一つのセンサを使用してバランス状態を測定している間に伸展装置を動かすことに適合した制御装置(150)とをもつリハビリテーション椅子システム(100)。  (もっと読む)
(もっと読む)
パーソナル特徴をバイオメトリック測定から判断するのための方法およびシステム
方法および装置が、個人のパーソナル特徴を判断するために提供される。バイオメトリックデータ測定は、個人から集めれらる。パーソナル特徴は、バイオメトリックデータ測定と、多変量のアルゴリズムのアプリケーションから引き出されたパーソナル特徴の値との間のアルゴリズム的関係を、以前の測定に適用することによって決定される。バイオメトリックデータ測定を集めることは、光を用いて個人の皮膚部位を照らすことと、皮膚部位から散乱された光を受け取ることと、受け取られた光からマルチスペクトルイメージを引き出すこととを含む。 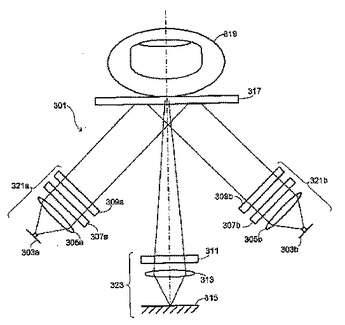 (もっと読む)
(もっと読む)
個体の1つまたは複数の関節運動に基づく1つまたは複数の信号を使用して、固体の位置変化と決定する方法及び装置
1つの例で装置は、個体の1つまたは複数の関節移動に基づいて1つまたは複数の信号を生成する1つまたは複数のセンサと、個体の位置の変化を決定するために1つまたは複数の信号のうちの1つまたは複数を使用する1つまたは複数の処理装置とを含む。 (もっと読む)
生得の、もしくは人工の膝関節の動的緊張装置
【課題】生得のまたは人工の膝関節を動的に緊張させる装置に関する。
【解決手段】本装置は骨もしくは大腿骨移植組織片に対する、骨頭支持表面(20A)を持つ少なくとも1つの大腿骨インサート(8A)と、骨もしくは脛骨移植組織片に対する、脛骨板支持表面(24A)を持つ少なくとも1つの脛骨インサート(10A)と、膝蓋骨が適所にあるなしに関わらず大腿骨インサートと脛骨インサート間に一定の強さのディストラクション力を加える力導入手段(4A、30A)とを具備する。骨頭支持表面(20A)は皿形にされ、膝関節移動時の骨もしくは大腿骨移植片に対する滑動手段(12A)を具備する。
(もっと読む)
角度測定器
角度測定器(11)では、支軸(16)回りで相対回転自在に第1アーム(12)に第2アーム(17)は連結される。第1および第2アーム(12、17)の相対角度は角度目盛りで読み取られる。指針(21)は支軸(16)に同軸の回転軸回りで回転する。指針(21)に基づき重力方向は特定される。例えば上腕および前腕の角度の測定にあたって第1および第2アーム(12、15)は上腕および前腕にあてがわれる。上腕および前腕の角度は読み取られる。同時に、測定者は指針の観察に基づき重力方向すなわち鉛直方向に対して上腕や前腕の傾斜角を導き出すことができる。上腕および前腕の相対角度の測定にあたって人体全体と上腕や前腕との相対関係がさらに規定される。こうしてリハビリテーションの分野で治療対象者の快復度は定量的にきめ細かく判定されることができる。 (もっと読む)
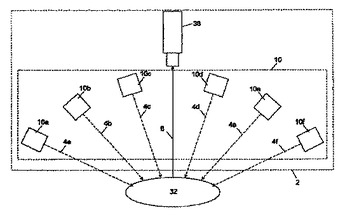
拡散赤外光線を利用したイメージング・システム
【課題】拡散赤外光線を利用した、皮下脂肪下血管のイメージング・システムの提供。
【解決手段】イメージング・システムは赤外光線で組織を照明することで、皮下血管の視認性を向上させ、反射された赤外光線に基づいて体組織および皮下血管のビデオ・イメージを作製する。本システムには、赤外光線を発生させる赤外光線源および赤外光線を拡散するための構造体が含まれている。拡散構造体には、光を拡散させる拡散素材から成る層が、一つもしくはそれ以上含まれている。システムには、更に、体組織から反射された赤外光線を受光し、反射された赤外光線に基づいて体組織のビデオ・イメージを作製するビデオ・イメージング・デバイスが含まれている。
 (もっと読む)
(もっと読む)
261 - 280 / 280
[ Back to top ]