
Fターム[5H180AA01]の内容
Fターム[5H180AA01]の下位に属するFターム
大形車両 (44)
中・小型、普通車 (33)
二・三輪車、オートバイ、車椅子 (177)
バス (168)
トラック、ミキサ車等の作業車両 (146)
緊急車両(パトカー、消防車等) (52)
危険物運搬用車両 (3)
タクシー、ハイヤ、送迎車 (205)
巡回車、集・配送車 (114)
時刻表により運行される車両、路線バス (140)
レース(競技)用の車両 (3)
その他の車両 (41)
Fターム[5H180AA01]に分類される特許
181 - 200 / 12,590
車載装置および危険運転警告出力記録方法
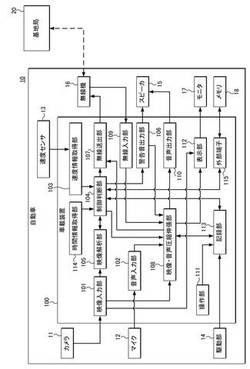
【課題】走行状態に応じて警告を発生するとともに走行状況を記録する車載装置において、警告発生の精度を高めることができるようにする。
【解決手段】車両の走行状態を取得する速度情報取得部と、車両の車外を撮像した映像を入力する映像入力部と、入力した映像から車両の走行位置が所定の基準を満たす状態を検出する映像解析部と、警告音を出力する警告音出力部と、映像から車両の走行位置が所定の基準を満たす状態が映像解析部により検出され、かつ速度情報取得部により取得した走行状態が所定の条件を満たす場合に、警告音出力手段に警告音を出力させる制御判断部と、警告音を含む車内の音声と車外の映像とを記録する記録部とを備える車載装置。
(もっと読む)
運転支援装置

【課題】自車両と他車両との衝突可能性判定の精度を上げることができ、自車両の走行している道路と平行な道路を走行する他車両が衝突する可能性があると誤判定することを防ぐことができる運転支援装置を実現する。
【解決手段】自車両情報取得手段と、他車両情報取得手段と、衝突可能性判定手段を備える運転支援装置において、前記衝突可能性判定手段は、自車両の位置と他車両の位置との間の直線距離と、自車両の位置と他車両の位置とを結ぶ直線と他車両の位置から他車両の進行方位へ伸ばした直線とがなす角度とを用いて、他車両の位置から他車両の進行方位へ伸ばした直線と自車両位置との間の最短距離を算出し、この最短距離が予め設定された距離未満である時に自車両と他車両とが衝突する可能性があると判定する。
(もっと読む)
警報装置
【課題】運転者の覚醒度に応じて、周囲に対して警報を行う警報装置を提供する。
【解決手段】車両Aと歩行者Cとの衝突リスクを判定する衝突確率算出部14と、車両Aの運転者Bの覚醒度を判定するドライバ状態認識部13と、を備え、衝突リスクに基づいて歩行者Cに対して警報を発する際に、覚醒度に応じて警報の度合いを変更することを特徴とする、警報装置1。
(もっと読む)
車両接近報知装置
【課題】不要な警報の発生を抑えること。
【解決手段】車両接近報知装置1は、車両周辺に位置する報知候補を検出する報知候補認識部11と、検出された報知候補と車両とが衝突する危険度(衝突確率)を算出する衝突確率算出部13と、算出された危険度に基づいて、報知候補に警報を発するか否かを判定する警報判定部14と、その判定結果に基づいて警報を発すると共に、警報を中止するための入力があった場合には警報を中止する警報制御部19と、を備える。
(もっと読む)
車両制御装置
【課題】妥当性が高い自車両のリスクポテンシャルの算出を可能とする車両制御装置を提供する。
【解決手段】車両制御装置1は、自車両の走行環境を認識する走行環境認識部21と、自車両周辺の障害物を認識する障害物認識部23と、車両と障害物との衝突事故に関する過失割合情報データベース15aを格納するDB記憶部15と、走行環境認識手段21で得られる走行環境と、障害物認識手段23で得られる障害物の状態と、DB記憶部15を参照して得られる過失割合情報と、に基づいて、自車両と障害物との衝突事故が発生したと想定した場合における自車両の想定過失割合を算出する想定過失割合算出部25と、を備え、想定過失割合が高いほど、障害物との関係におけるリスクポテンシャルを高く算出する。
(もっと読む)
隊列走行システム、先頭無人車両コントローラ、後続有人車両コントローラ、制御方法、及びプログラム
【課題】複数の車両を隊列走行させること。
【解決手段】先頭無人車両コントローラ110と、後続有人車両コントローラ130とを備え、先頭無人車両コントローラ110は、映像を示すデータを後続有人車両コントローラ130に送信する映像データ送信部と、無人車両200Aの操縦を制御するためのデータを後続有人車両コントローラ130から受信する制御データ受信部と、無人車両200Aの操縦を制御する操縦制御部とを有し、後続有人車両コントローラ130は、映像を示すデータを先頭無人車両コントローラ110から受信する映像データ受信部と、映像データ受信部が受信したデータを、表示手段に出力する映像データ出力部と、無人車両200Aの操縦を制御するためのデータの入力を、操縦手段から受け付ける制御データ入力受付部と、制御データ入力受付部が入力を受け付けたデータを先頭無人車両コントローラ110に送信する制御データ送信部とを有する。
(もっと読む)
運転支援装置
【課題】例えば交差点の赤信号に起因した車両の停止回数等を減少させ、車両の燃費効率を向上させることと、安全に交差点を通過することとの両立を実現可能とする。
【解決手段】運転支援装置(1)は、車両の車両情報を測定する測定手段(10)と、車両が次に通過する信号機の位置及び信号機の信号サイクルに関する信号サイクル情報を取得する取得手段(20)と、測定された車両情報及び取得された信号サイクル情報に基づいて、前記信号サイクルが示す青信号が開始される青信号開始時刻において前記車両が前記信号機の位置より所定距離だけ手前に位置する所定地点を通過可能な前記車両の目標速度を算出する算出手段(120)と、算出された目標速度の報知を含む車両の運転支援を行う運転支援手段(30)とを備える。
(もっと読む)
通路検出方法、装置、及びプログラム
【課題】轍の検出精度を高めることによって、従来よりも精確に通路を検出することができる通路検出方法、装置、及びプログラムを提供する。
【解決手段】通路検出装置1は、入力画像に対する画像処理を行って入力画像に含まれる通路領域を検出するものであり、入力画像に含まれる通路領域のおおよその位置を示す中心ブロックを抽出する中心ブロック抽出部と、入力画像に対して複数種類のフィルタ処理を行って入力画像の評価に用いる特徴量をフィルタ処理の種類毎に求める特徴量算出部32と、中心ブロック抽出部31で抽出された中心ブロックにおける特徴量と同様の特徴量を有する領域を入力画像から抽出することによって通路領域を検出する通路領域検出部34とを備える。
(もっと読む)
緊急車両情報通報システム、受信装置および緊急車両情報通報方法
【課題】緊急車両情報通報システムにおいて、一般車両の搭乗者に緊急車両の緊急走行を適切に通報するための技術を提供する。
【解決手段】本発明の緊急車両情報通報システムは、緊急車両に搭載される送信装置と、一般車両に搭載される受信装置を有する。送信装置は、緊急走行時、緊急車両の現在位置を示す情報と、緊急車両の進行方向を示す情報を受信装置に無線送信する。受信装置は、緊急車両の現在位置を示す情報と、緊急車両の進行方向を示す情報と、自車両の現在位置を示す情報と、自車両の進行方向を示す情報に基づいて、緊急車両が接近するか否かを判定し、接近すると判定した場合のみ、緊急車両の接近を自車両の搭乗者に通報する。
(もっと読む)
車両周辺監視装置
【課題】表示装置に表示される情報が過多とならず、運転者が直感的に自車と障害物との距離感を把握可能な車両周辺監視装置を提供する。
【解決手段】車両に設けられた撮影装置12により撮影された車両の周辺画像を取得する画像取得部1と、車両の周辺にある障害物及びその位置を検出する障害物検出部2と、車両の走行状態を検出する走行状態検出部6と、走行状態検出部6で検出した車両の走行状態に基づいて予測進路線を生成する予測進路線生成部4と、予測進路線で規定される予測進路領域に障害物が存在する場合に、予測進路領域のうち障害物を含む一部領域の強調表示を決定する強調表示決定部3と、周辺画像に予測進路線及び強調表示を重畳し、重畳した画像を車両の車室内に設けられた表示装置20に表示する表示制御部5と、を備える。
(もっと読む)
車両制御装置
【課題】周辺車両のカーブ時の挙動に対応した走行計画を立てる車両制御装置を提供することを課題とする。
【解決手段】自車両の走行計画を生成し、当該走行計画に基づいて車両制御を行う車両制御装置1であって、周辺車両のカーブ走行時の挙動を周辺車両のカーブ走行時の最大横加速度又は/及び減速度に基づいて予測する周辺車両挙動予測手段31cと、周辺車両挙動予測手段31cで予測した周辺車両のカーブ走行時の挙動に基づいて自車両の走行計画を生成する走行計画生成手段31eを備えることを特徴とし、周辺車両がカーブを走行したときに、周辺車両のカーブ走行時の最大横加速度又は/及び減速度を学習する学習手段31aを備え、周辺車両挙動予測手段31cは、学習手段31aで学習した最大横加速度又は/及び減速度に基づいて周辺車両のカーブ走行時の挙動を予測すると好適である。
(もっと読む)
ナビゲーションシステム
【課題】代替経路を選択するか否かをより的確に判断することができるナビゲーションシステムを提供する。
【解決手段】現在位置検出部11で検出された現在位置から目的地設定部12で設定された目的地までの経路を探索する経路探索部13と、探索された経路に基づき案内を行なう経路案内部16と、交通情報を取得する交通情報取得部14と、取得された交通情報に基づき経路案内部で案内中の経路の代替経路を探索する代替経路探索部15と、案内中の経路または探索された代替経路のいずれかを選択するための経路選択画面を生成する経路選択部17と、案内中の経路および代替経路に関する代替経路情報を生成する経路情報演算部18と、経路選択部で生成された経路選択画面と経路情報演算部で算出された代替経路情報を含む代替経路情報画面とを同一画面に表示させる表示制御部19を備えている。
(もっと読む)
車両のナビゲーション装置
【課題】現在位置測位精度に基づく態様で一時停止案内を行う。
【解決手段】ナビゲーション装置は、地図データ上で車両が走行する経路を走行予定経路として算出する。走行予定経路上に一時停止すべき場所が存在し、該現在位置と該一時停止すべき場所の間に、車両が現在位置する道路が、複数の分岐道路に分岐する分岐点が存在すると判断した場合、一時停止すべき場所が存在する分岐道路のそれぞれについて、該分岐道路と、該車両が現在位置する道路との間の角度αと、該分岐道路の、前記一時停止すべき場所が存在しない一つまたは複数の分岐道路に対する角度のうちの最小値Bと、該車両が現在位置する道路の幅員と、前記複数の分岐道路のうちの最も大きい幅員と、の少なくとも一つに基づいて、該一時停止すべき場所についての案内が誤案内となる可能性の程度を表す評点を算出する。該算出された評点の大きさに応じて、一時停止案内の報知形態を変更する。
(もっと読む)
ナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、ナビゲーション方法、および、プログラム
【課題】案内経路上のレーンガイドが必要なガイドポイント等を判断し、案内経路データとともにレーンガイドが必要な地点のレーン情報を提供することで、該当地点に接近した際にレーンガイドを行うことができるナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、ナビゲーション方法、および、プログラムを提供することを課題とする。
【解決手段】本発明は、案内経路を探索し、案内経路上の交通情報を案内経路交通情報として抽出し、経路案内を実行し、現在位置から目的地までの経路である確認経路を探索し、確認経路上の交通情報を確認経路交通情報として抽出し、案内経路の一部と確認経路と一致するか否かを判定し、一致する場合確認経路上の案内経路交通情報と確認経路交通情報とが一致するか否か判定し、一致しない場合確認経路交通情報を反映した経路案内情報を生成する。
(もっと読む)
ナビゲーション装置
【課題】施設情報についてのユーザのニーズ(必要性や要求)を自動的に特定し、当該ニーズに応える施設情報を含む地図データを的確に更新するナビゲーション装置を提供する。
【解決手段】ユーザの入力に応じて表示部32に表示する施設情報を設定する表示施設設定部24によって設定された表示施設が、表示施設記憶部26に記憶される。更新情報取得部28は、表示施設記憶部26に記憶されている表示施設を参照し、更新対象とする施設を特定し、前記更新対象とする施設に関する更新情報を取得する。
(もっと読む)
レーザセンサ及びこれを用いた検出対象判定方法
【課題】レーザセンサを用いて検出対象を検出したときに検出対象が分離して認識されても、これらが一体のものか否かを判定することができるレーザセンサ及びこれを用いた検出対象判定方法を提供する。
【解決手段】検出対象領域6に対してレーザ光を出射するレーザ光出射部2と、検出対象7a、7bからの反射レーザ光を受光して受光情報を出力する受光部3と、受光情報を一時的に記憶する記憶部5と、受光部3及び記憶部5の少なくとも一方から受光情報を受け取り、受光情報が歩行者又は車両のいずれのカテゴリに属するかを判定条件に基づいて判定する判定部4とを備え、判定条件は、受光情報に基づき、対応する検出対象7a、7bの大きさを判定するための大きさ判定基準と、前回の走査周期と今回の走査周期にて得られた受光情報に基づき、同一の検出対象7a、7bの移動距離を判定するための移動距離判定基準を含む。
(もっと読む)
顔向き検知装置
【課題】サングラスを着用したひとの顔の中心位置の検出精度を向上させる。
【解決手段】顔向き検知装置10は、ひとの顔を撮像する乗員カメラ12から出力された顔画像から、撮像用光源14から照射された光の反射点を抽出する反射点抽出部21と、反射点の面積が最大となる1対の反射点を選択する反射点選択部22と、1対の反射点間の中心座標を算出する中心座標算出部23と、サングラス着用判定部27から出力された判定結果においてひとがサングラスを着用していると判定された場合に、中心座標算出部23から出力された中心座標に基づき、ひとの顔中心位置を検出する位置検出部28と、ひとの顔中心位置に基づき、ひとの顔向き方向を検知する顔向き検知部29とを備える。
(もっと読む)
交通流情報生成装置、コンピュータプログラム及び交通流情報生成方法
【課題】道路網での交通流を把握することができる交通流情報生成装置、コンピュータプログラム及び交通流情報生成方法を提供する。
【解決手段】走行経路抽出部11は、アップリンク履歴情報30に基づいて、道路の任意の地点を通過する互いに異なる複数の走行経路を抽出する。走行経路抽出部11は、抽出した走行経路が新しい経路である場合、トリップ数を1として走行経路リストに登録する。また、走行経路抽出部11は、抽出した走行経路がすでに登録済みである場合、当該走行経路のトリップ数に1を加算する。車両台数算出部13は、抽出した走行経路のうち、一の走行経路が他の走行経路に含まれる場合、当該一の走行経路のトリップ数に当該他の走行経路のトリップ数を加算して当該一の走行経路を走行する車両の台数を算出する。
(もっと読む)
運転支援装置
【課題】カーナビゲーション装置を搭載していない車両であっても、交差点における一時停止を予測し、それを的確に報知することができるようにする。
【解決手段】車両制御部12は、車両に搭載したカメラユニット10で撮影した画像データに基づいて、交差点6を検出し、次いで当該交差点6に信号機3が有るか否か、停止標識4が有るか否か、停止線5が有るか否かを調べる。そして信号機3の信号灯色が赤色或いは黄色であり、或いは停止標識4が検出され、或いは停止線5が検出された場合であって、自車両1が停止線5に到達するまでの距離Lが注意報知距離L1以内で(L≦L1)、且つ車速Vが設定車速V1以上の場合、警報装置14から運転者に注意を促す警報を発生させる。
(もっと読む)
データ処理装置、そのコンピュータプログラムおよびデータ処理方法
【課題】目的地まで最短距離の移動体を選定することができるデータ処理装置を提供する。
【解決手段】各々が任意に移動している複数の移動体である車両CRの車両位置情報CPDを個々に車両情報取得部110が取得する。任意に発生する目的地である災害点DPの災害点位置情報DPDを災害点情報取得部120が取得する。災害点DPを内包する所定領域で車両CRの移動の障害となる障害物BRの障害物位置情報BPDを障害物DB6が記憶する。障害物位置情報BPDを回避して複数の車両位置情報CPDから災害点位置情報DPDまでの最短ルートSRを演算制御部5が生成する。このため、従来の最近車両計算のような直線近似計算や事前計算方式、デジタルデータ道路網を利用した最短経路探索方式などを採用せずに、災害点DPまで最短距離の車両CRを選定することができる。
(もっと読む)
181 - 200 / 12,590
[ Back to top ]