
Fターム[5H180AA01]の内容
Fターム[5H180AA01]の下位に属するFターム
大形車両 (44)
中・小型、普通車 (33)
二・三輪車、オートバイ、車椅子 (177)
バス (168)
トラック、ミキサ車等の作業車両 (146)
緊急車両(パトカー、消防車等) (52)
危険物運搬用車両 (3)
タクシー、ハイヤ、送迎車 (205)
巡回車、集・配送車 (114)
時刻表により運行される車両、路線バス (140)
レース(競技)用の車両 (3)
その他の車両 (41)
Fターム[5H180AA01]に分類される特許
261 - 280 / 12,590
走行制御システム、制御プログラム、記録媒体
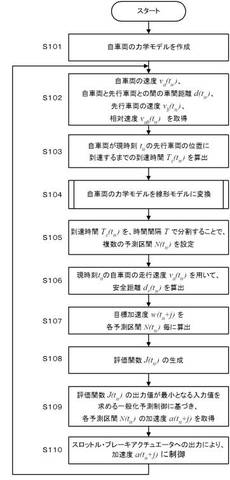
【課題】先行車両への追突を回避可能である安全な走行制御と、自車両に急激な速度変化が生じることのない乗り心地の良好な走行制御とを両立して実現できる走行制御システムを提供する。
【解決手段】走行制御システムは、自車両が現時刻の先行車両の位置に到達するまでの到達時間を分割することで複数の予測区間を設定して(ステップS105)、到達時間の経過時点における自車両の目標加速度を各予測区間毎に算出する(ステップS107)。そして、各予測区間における自車両の予測加速度や、連続する2つの予測区間における操作変化量を入力値とする評価関数を作成して(ステップS108)、評価関数の出力値が最小となる入力値を求める一般化予測制御に基づき、各予測区間における自車両の加速度を取得して(ステップS109)、取得値に現時刻以降の自車両の加速度を制御する(ステップS110)。
(もっと読む)
車両制御装置

【課題】十分な安全性を確保しつつも、状況に応じて運転者の運転感覚に沿った制御を行うことのできる車両制御装置を提供する。
【解決手段】逸脱角度θに対する目標逸脱角度θ´を演算する目標逸脱角度演算部16が、白線WLと障害物B1との間の逸脱余裕距離Dに基づいて目標逸脱角度θ´を演算する。白線WLと障害物B1との間の逸脱余裕距離Dは、白線WLを越えた場合に自車両M1と障害物B1との間にどの程度の余裕があるのかを示している。当該逸脱余裕距離Dに基づいて、安全性を確実に確保できる範囲で目標逸脱角度θ´を演算しておけば、何らかの理由で逸脱角度θが増加する動作をするとしても、目標逸脱角度θ´を満たす範囲において、ある程度許容することができる。これによって、制御量が過剰に介入してしまうことを抑制することができる。
(もっと読む)
減速支援システム
【課題】車両の運転者の意図に沿った減速支援制御を行う。
【解決手段】減速支援システム(10)は、車両(1)に搭載され、車両が交差点に進入することを検知する第1検知手段(109)と、車両が交差点に進入した際に、減速制御開始条件が成立したことを条件に、減速支援制御を行う第1減速支援手段(109)と、車両が交差点を右折又は左折するか否かを判定する右左折判定手段(109)とを備える。車両が交差点を右折又は左折すると判定された場合、第1減速支援手段は、車両の運転者が、車両を右折又は左折させるためにハンドルを操舵した方向とは反対方向にハンドルを操舵し始めたタイミングで、減速支援制御を終了する。他方、車両が交差点を右折又は左折しないと判定された場合、第1減速支援手段は、運転者が、アクセルオフからアクセルオンにしたタイミングで、減速支援制御を終了する。
(もっと読む)
運転学習システム及び運転支援システム
【課題】車両の運転者が期待する制御を行う。
【解決手段】運転学習システム(10)は、車両(1)に搭載され、車両の運転者に係る運転挙動を学習する運転学習システムである。該運転学習システムは、車両が交差点を通過中であり、且つ車両が交差点を右折又は左折することを条件に、車両が交差点を右折又は左折し始めた後に、(i)運転者が車両を右折又は左折させるためにハンドルを操舵した方向とは反対方向にハンドルを操舵し始めた時点における車両の交差点内の位置である第1位置、及び(ii)運転者がアクセルペダルを踏下し始めた時点における車両の交差点内の位置である第2位置を記録する記録手段(109)と、記録された第2位置から記録された第1位置を差し引いた差分を計算する計算手段(109)と、計算された差分と閾値とを比較した結果に応じて、運転挙動を学習する際に記録すべき項目を変更する変更手段(109)とを備える。
(もっと読む)
走行支援装置
【課題】障害物までの距離を精度良く検出し、適切な停車位置の案内を行うことができる走行支援装置を提供する。
【解決手段】振動センサ10によって検出された実際の振動パターンと、記憶部33に予め記憶された規定パターンとが一致するか否かを振動パターン判断部31が判断する。振動パターン判断部31によって、振動パターンと規定パターンとが一致すると判断された場合には、車両100の走行路上に輪留め300が存在するものとして、報知判断部34がスピーカ40を通じて輪留め300の存在を報知する。これにより、走行路500から入力される実際の振動パターンに基づいて、輪留め300の存在を正確に検出することができ、車両100の運転者に対して、適切な停車位置の報知を行うことが可能となる。
(もっと読む)
ナビゲーション装置
【課題】経路から逸脱した場合の直近の経由地の取り扱いをユーザの意志で決定できる使い勝手に優れたナビゲーション装置を提供する。
【解決手段】経由地および目的地を設定する設定手段2、3、21、17と、設定手段で設定された経由地を経由して目的地に至る経路を探索する経路探索部130と、経路探索部で探索された経路に沿って誘導案内を行う誘導案内部140と、誘導案内部において直近の経由地に至る経路から所定距離以上逸脱したことが判断された場合に、逸脱した旨を表すメッセージを出力する出力手段18、3、4と、出力手段に出力されたメッセージに応答して、直近の経由地を経由するかどうかの指示を入力する入力手段2、3、21、17を備えている。
(もっと読む)
ナビゲーション装置
【課題】車内温度の上昇度合の低減を図ることのできるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置1は、地図情報および日陰領域に基づいて、車内温度の上昇度合を抑制する上で駐車を推奨する駐車場である推奨駐車場を目的地周辺の複数の駐車場の中から選定する。次に、ナビゲーション装置1は、地図情報、太陽位置情報、および日陰領域に基づいて、推奨駐車場が有する複数の駐車区画ごとに、車内温度の上昇度合を抑制する上で推奨する駐車区画内での推奨駐車向きおよび駐車区画内での推奨駐車位置を決定し、それら決定した駐車区画内での推奨駐車向きおよび駐車区画内での推奨駐車位置を表示部50に表示する。
(もっと読む)
障害物検出装置
【課題】近距離においても物標の位置を精度良く得る。
【解決手段】センサ2で物標を検出する障害物検出装置1において、センサ2により物標が検出されていた状態から該物標が検出できない状態となったときに、センサ2により物標が検出されていた状態のときの該物標の位置及び速度情報と、センサ2で物標を検出することができなくなったときからの経過時間と、から、センサ2により物標を検出できないときの該物標の位置を推定する推定手段83を備える。
(もっと読む)
運転支援装置、運転支援方法及びコンピュータプログラム
【課題】車線毎の規制の内容が不規則或いは頻繁に変動する道路区間においても、車両が現在走行する車線から他の車線へと進入する場合に、車線毎の規制の内容に応じて警告することが可能な運転支援装置、運転支援方法及びコンピュータプログラムを提供する。
【解決手段】車両の周囲の道路上に設置された車線区分構造物を検出し(S3)、検出された車線区分構造物が車両の進入可能な間隔を隔てて連続して設置されている場合に、該間隔を形成する各車線区分構造物の座標に基づいて、各車線区分構造物の間を結ぶ仮想線を設定するとともに(S7)、設定された仮想線を自車両が越えると判定された場合に警告を行う(S11)ように構成する。
(もっと読む)
車両前方監視装置
【課題】車両のフロントガラスを払拭するワイパーの払拭動作に伴い、前方物体が未検出となる頻度を低減可能な車両前方監視装置を提供する。
【解決手段】車両前方監視装置は、狭角カメラと、広角カメラと、狭角画像情報Dn及び広角画像情報Dwの何れか一方を用いて画像処理を行い前方物体を検出する物体検出部と、物体相対距離Dfwに応じて狭角画像情報Dn及び広角画像情報Dwの何れか一方を物体検出部が用いる画像情報として選択する画像情報選択部と、処理用カメラの視野内にワイパーが含まれているか否かを判別するワイパー取り込み判別部とを備える。物体検出部は、ワイパー取り込み判別部が処理用カメラの視野内にワイパーが含まれていると判別している場合、非選択画像情報を用いて前方物体を検出する。
(もっと読む)
死角領域推定装置及びプログラム
【課題】、簡易な処理で、動的死角領域を推定することができるようにする。
【解決手段】存在確率変更部26によって、地図情報において、レーザレーダ12によって検出された現在の物体の位置に対応するブロックの存在確率を増加させると共に、自車両から検出された現在の物体の位置までの直線上に存在するブロックの存在確率を減少させることにより、静止物の位置を記録した地図情報を取得する。静的死角推定部28によって、取得された地図情報に記録された静止物の位置と、自車両の現在の位置とに基づいて、静的死角領域を推定する。現死角推定部30によって、レーザレーダ12によって検出された現在の物体の位置に基づいて、現在死角領域を推定する。動的死角推定部32によって、推定された現在死角領域と、推定された静的死角領域との差分に基づいて、動的死角領域を推定する。
(もっと読む)
類似運転時画像検索装置及びプログラム
【課題】類似する運転場面の運転時画像を精度良く検索する。
【解決手段】運転時画像と、運転時画像の各々に対応付けられた複数の異なる時系列の運転データとからなる複数の学習用データ内の特定のドライバの運転データを、学習により複数のクラスタに分類し、各クラスタに他のドライバのプロファイルと対応させたモードを付与してプロファイルを生成し、プロファイルに含まれるクラスタであって、学習用データ内の運転データの各々が属するクラスタに基づいて、運転データを第1のモード系列に変換し、モード系列と運転時画像とを対応させて記憶する。対象データ内の運転データをプロファイルに基づいて、第2のモード系列に変換し、第2のモード系列と、第1のモード系列の各々との類似度に基づいて、第1のモード系列に対応して記憶された運転時画像を検索する。
(もっと読む)
交通信号システム
【課題】 停電などが発生して電力供給を切り換える場合でも、安全に信号灯器の制御を行うことのできる交通信号システムを提供する。
【解決手段】 交差点に設置される信号灯器3の点灯制御を行う信号制御装置1と、充電装置により充電されるバッテリ11および電源装置8から供給される電力とバッテリ11から供給される電力とを切り換える切り換えユニット9を備えてなるバックアップ装置7と、を備えてなり、信号制御装置1は、バッテリ11から電力が供給されている間に、バックアップ制御部13から出力されるバックアップ制御信号に基づく制御を行うように構成されている。
(もっと読む)
交通信号システム
【課題】 停電などが発生して電力供給を切り換えたことを管制センターに確実に認識させることのできる交通信号システムを提供する。
【解決手段】 交差点に設置される信号灯器3の点灯制御を行う信号制御装置1と、バッテリ11および電源装置8から供給される電力とバッテリ11から供給される電力とを切り換える切り換えユニット9を備えてなるバックアップ装置7と、を備えてなり、信号制御装置1は、バッテリ11からの供給電力に切り換えられた際のバックアップ動作信号に基づいて、管制センター14にバックアップ動作通知を送信する通信部15を備えている。
(もっと読む)
停止線認識装置
【課題】過大な演算負荷を発生させることなく、自車両の制御に必要な停止線を精度良く認識することができる停止線認識装置を提供する。
【解決手段】画像処理ユニット4は、自車走行路前方の信号機の認識を行い、自車走行路上の直前の信号機が設定距離L2以内の位置に存在し且つその信号機が赤信号であることを認識したとき、停止線認識モードへと移行して停止線の認識処理を実行する。これにより、不要な場面での停止線認識処理の実行を的確に排除することができる。従って、過大な演算負荷を発生させることなく、自車両1の制御に必要な停止線を精度良く認識することができる。
(もっと読む)
安全運転診断装置
【課題】交差点において安全確認をしていないにもかかわらず安全確認をしたと誤判定すること、及び安全確認をしたにもかかわらず安全確認をしていないと誤判定することを低減することができる安全運転診断装置を提供すること。
【解決手段】自車両Cが交差点の進入位置から2[m]より長く進入した時点以前の5[s]間の水平角信号をサンプリングする(S10〜S16)。また、その5[s]前の前後における水平角の平均の絶対値を算出して、その絶対値が所定値以上である場合は、サンプリング部13aにてサンプリングした水平角信号を加工する(S17、S18)。そして、サンプリングした水平角信号からパワースペクトルを計算すると共に、0.2〜1.5Hzにおけるパワーの極大値の総和を計算して、この総和と判定値を比較して、ドライバによる安全確認がなされたか否かを判定する(S19〜21)。
(もっと読む)
交互通行信号装置
【課題】山間地の工事現場などの作業車両が通行する通行量の少ない交互通行路に設置する信号装置で、簡単な制御手段で効率的な双方向通行を実現する。
【解決手段】交互通行路の両方の進入路に、停止信号灯(黄色回転灯)1a,1bと車両通過センサ2a,2bを各々設置し、通過センサでの車両1台の通過を「+1」と計数し、他方を「−1」として加算処理を行い、加算値が「0」以外の場合には、加算値の符号の反対側の計数出力を行う方を出口側として黄色信号灯を回転点灯し、「0」になると消灯し、加算値が「0」以外を算出した時から一定時間経過した後は、前記加算値に関わらず入口側となっている方の信号灯を所定時間回転点灯させてなる信号駆動制御手段を備える。
(もっと読む)
人横断支援車両システム及び人横断支援方法
【課題】横断歩道が設置されていない道路においても、歩行者の安全な道路横断を支援する歩行者横断支援車両システムを提供する。
【解決手段】人を検出する人検出手段2と、車両の位置情報を検出する自車位置検出手段3と、人検出手段2が検出した人を横断候補者として、横断候補者の絶対的な位置を計算するとともに、横断候補者が道路を横断するために待機している時間を計測して待機状態の指標である待機スコアを計算し、計算結果を人位置及び待機スコア記憶手段6に記憶する位置及び待機スコア計算手段5と、横断候補者の人位置および待機スコアに基づいて、車両を停車させるか否かを判断する停車判断手段10と、停車判断手段が車両を停車させると判断した場合に車両を停車させる走行制御手段12と、停車判断手段の指令に基づき、横断候補者に対し道路を横断可能か否かの旨の情報を表示する信号機である歩行者横断信号表示手段13と、を備える。
(もっと読む)
運転者覚醒度検査装置
【課題】運転者が運転に集中し易く、かつ精度に優れた運転者覚醒度検査装置の提供。
【解決手段】この覚醒度検査装置2は、運転者情報入力部16と、顔面皮膚温度を非接触で計測する顔面温度計測部8と、手指皮膚温度を計測する手指温度計測部10と、手指から脈拍数を計測する脈拍計測部12と、制御装置4と、記憶装置6とを備えている。この記憶装置6は、顔面皮膚温度、手指皮膚温度及び脈拍数の判定閾値を記憶している。この制御装置4は、計測した顔面皮膚温度、手指皮膚温度及び脈拍数から得られるデータと判定閾値とから運転者の覚醒度を判定している。好ましくは、運転者情報入力部61が、カメラ64と画像処理装置66と有する顔認識部63を備えている。顔認識部63から得られる画像データと顔面データとから運転者を特定される。
(もっと読む)
有料道路の料金収受システム
【課題】本発明はETCシステムを利用することによる利用料金の割引の適用に通行券の受け取りを必要としない利便性の良い有料道路の料金収受システムを提供することを目的とする。
【解決手段】入口料金所の入口車線への進入が検知された車両がETCカード未挿入車両であると判定されたとき、当該車両の車両情報を入口情報と関連付けて中央処理装置100の管理テーブルに記憶する。
また、出口料金所の入口車線への進入が検知された車両が中央処理装置当100の管理テーブルに記憶された車両であるとき、管理テーブルに記憶された入口情報に基づいて利用料金を算出する。この算出結果に基づいて、運転手からETCカードの提示があった場合にはETC割引を適用するため、ETCシステムを利用することによる利用料金の割引の適用に通行券の受け取りを必要としない利便性の良い有料道路の料金収受システムを提供することができる。
(もっと読む)
261 - 280 / 12,590
[ Back to top ]