
Fターム[5H180AA01]の内容
Fターム[5H180AA01]の下位に属するFターム
大形車両 (44)
中・小型、普通車 (33)
二・三輪車、オートバイ、車椅子 (177)
バス (168)
トラック、ミキサ車等の作業車両 (146)
緊急車両(パトカー、消防車等) (52)
危険物運搬用車両 (3)
タクシー、ハイヤ、送迎車 (205)
巡回車、集・配送車 (114)
時刻表により運行される車両、路線バス (140)
レース(競技)用の車両 (3)
その他の車両 (41)
Fターム[5H180AA01]に分類される特許
341 - 360 / 12,590
情報処理装置、車載装置、情報処理システム、情報処理方法、および、プログラム
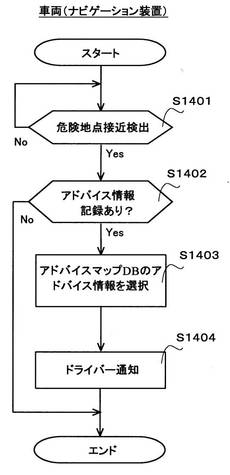
【課題】ドライバー個人の運転技量などの内的要因を考慮して、ドライバー通知を行うか否かを判断する技術を提供することを目的とする。
【解決手段】地点で生じやすい走行状態と当該地点の運転レベルとの関連性を判定し、このアドバイス情報を提供すべき複数のユーザごとに、ユーザの運転レベルを記憶する。そして、複数のユーザのそれぞれの運転レベルに応じて、複数の地点ごとのアドバイス情報を選択する。この選択は、アドバイス情報の選択対象となる地点に関して、走行状態と前記運転レベルとの関連性があると判定された場合は、当該ユーザの運転レベルに応じたアドバイス情報を選択し、走行状態と運転レベルとの関連性がないと判定された場合は、当該ユーザの運転レベルと関連しないアドバイス情報を選択する。これにより、ドライバーの運転技量に応じたアドバイス情報を選択できる。
(もっと読む)
走行支援装置

【課題】死角がある場合に適切な適正車速を設定する走行支援装置を提供することを課題とする。
【解決手段】車両に搭載される走行支援装置であって、車両前方の死角領域を検出する死角領域検出手段と、死角領域検出手段で検出した死角領域を減少する走行領域を検出する走行領域検出手段と、走行領域検出手段で検出した走行領域での適正車速を設定する適正車速設定手段を備えることを特徴とし、適正車速設定手段は、周辺環境に応じて適正車速を変更すると好適である。
(もっと読む)
車両制御装置
【課題】状況に応じて適切な走行経路を設定することのできる車両制御装置を提供する。
【解決手段】車両周辺の物体に対する第一危険度D1を演算する第一危険度演算部21と、交通規則に対する第二危険度D2を演算する第二危険度演算部22と、を備え、第一危険度D1が所定の閾値以上になる場合、第二危険度D2が、第一危険度D1に対して相対的に下がるように演算する。すなわち、交通規則に対する第二危険度D2に比して物体に対する第一危険度D1を優先的に判断することができる。このような第一危険度D1及び第二危険度D2に基づくことによって、物体に対する危険度が高くなる状況において、物体を回避することを優先させた走行経路を設定することができる。
(もっと読む)
自律走行車および自律走行方法
【課題】飛行体と連携して走行先の死角を無くし、走行できる自律走行車を提供する。
【解決手段】飛行体12が自律走行車11を観測することにより得られた自律走行車11の走行履歴と飛行体12が自律走行車11の周辺を観測することにより得られた第1の観測区画毎の自律走行車11の走行可否と第1の観測区画毎の座標とを受信する受信手段と、自車両の位置の履歴を記憶する走行履歴作成手段と、自車両の周辺を観測し、第2の観測区画毎に物体の存在有無を判定する走行可否作成手段と、飛行体12から受信した走行履歴と、走行履歴作成手段により作成された走行履歴とから座標変換行列を算出し、座標変換行列を用いて飛行体12から受信した座標を座標変換し、飛行体12から受信した走行可否と、走行可否作成手段により作成された走行可否とに基づいて、第2の観測区画毎に走行可否を算出する計算手段と、を備える。
(もっと読む)
無線装置
【課題】運転者に、画面上の表示を容易に確認させる技術を提供する。
【解決手段】GPS受信部22は、車両の位置情報を取得する。処理部20、変復調部18、RF部16は、取得した位置情報が含まれたパケット信号を送信するとともに、他の車両に搭載された他の無線装置から、当該他の車両の位置情報が含まれたパケット信号を受信する。導出部28は、受信したパケット信号に含まれた位置情報と、取得した位置情報とをもとに、車両に対する他の車両の相対的な存在方向を導出する。表示制御部30は、導出した存在方向をディスプレイ24の縁近傍の一部分に表示させる。ここで、表示制御部30は、ディスプレイ24の縁近傍のうち、存在方向が表示される一部分の位置を存在方向に応じて変更する。
(もっと読む)
統合シミュレータ
【課題】統合シミュレータの実行効率を向上する。
【解決手段】交通流シミュレータとITSシミュレータと、を備え、交通流シミュレータによる車両位置の結果に基づいてITSアプリケーションが車両動作に与える影響を求め、この影響を交通流シミュレータに反映して車両動作を模擬することを繰り返して車両の動作を模擬する統合シミュレータであって、交通流シミュレータは、タイムステップtにおける車両位置を、タイムステップt−n(n≧2)以前の前記交通流シミュレータおよび前記ITSシミュレータの結果に基づいて求めるものであり、前記統合シミュレータは、タイムステップtまでのシミュレーションが完了している際に、タイムステップt+1〜t+nにおける車両の位置およびITSが車両動作に与える影響を求めるn個のシミュレーションを並列に実行する。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】 自車前方に存在する走行規制に対し注意を喚起する「運転支援装置、運転支援方法および運転支援プログラム」を提供する。
【解決手段】 本発明の運転支援装置は、自車Mが走行している道路前方に存在する一時停止60、62に関する情報を配信装置30からの無線により受信する受信手段と、自車前方を撮像する撮像カメラと、撮像データに基づき自車前方の視界の良否を判定する判定手段と、自車前方の視界が不良であると判定されたとき、一時停止が存在することを知らせる警報を提示する提示手段とを有する。
(もっと読む)
車両の走行安全装置
【課題】見通しの悪い交差点等において、運転者が前方の安全を確認しようとしている場合に、運転者に衝突の可能性のある移動物体の存在を知らせる。
【解決手段】車両の走行安全装置は、車両に設けられ、該車両の周辺の物体を検出する物体検出手段と、車両の走行状態を検出するための走行状態検出手段と、検出された物体のうち、車両の進行経路に接近してくる移動物体を特定する移動物体特定手段と、運転者の前方への乗り出しの有無を判定する乗り出し判定手段と、接近してくる移動物体があり、かつ運転者が前方へ乗り出しているときに、運転者に移動物体の接近を知らせる報知手段と、を備える。
(もっと読む)
車両周囲表示装置、車両周囲表示方法
【課題】 従来、車載装置において、車両の周囲を画像として表示するとともに、コーナーセンサー等により障害物の存在を検知して、車両の周囲の画像上に当該コーナーセンサーが障害物を検知した旨の表示を行う技術がある。しかし、そのような技術では、障害物が付近に存在することを示すことはできるが、運転者は障害物の具体的な形状をイメージし難い。
本発明の目的は、運転者に車両の周囲の立体物の配置状況をよりわかりやすく示す技術を提供することにある。
【解決手段】
本発明の車両周囲表示装置は、車両の周囲を撮像するとともに車両の周囲に存在する立体物の高さを検知して、立体物の高さが車両にとって危険な高さにある場合に、画像に含まれる危険な障害物を特徴付けて表示する。
(もっと読む)
無線送受信装置及び移動体管理システム
【課題】無線LAN機能を有する無線送受信装置によって、移動体の状態を監視可能な移動体管理システムを、低コストで簡便に構築する。
【解決手段】移動体の様々な情報を取得するセンサーと、移動体の位置情報取得部と、時刻取得部と、その時刻情報を記録する時計機能部と、データを蓄精する記憶部と、無線LAN送受信部を備え、それぞれが中央演算装置により制御され、移動体に備わる被計測対象の状態、位置情報、時刻情報を無線送信する。無線送受信機能に無線LANを利用することによって、汎用性が高く、世界で最も普及しているインフラを利用することが可能で、安価で手間の掛からない簡便なシステムを構築できる。
(もっと読む)
通信端末装置
【課題】本発明は、パケット通信に利用可能な空きスロットが無い場合でもパケット通信に利用するスロットを決定することを目的とする。
【解決手段】本発明は、自車両Aに搭載された通信端末装置1の車車間通信情報処理部11が、パケット通信に利用できるFREEスロットが無いと判定した場合、GPSアンテナ2aが取得した位置情報、受信状態信号解析部8がして得られた周囲の車両の位置情報に基づいて、自車両Aの後方にある車両Dと車両Eのスロットの利用状況を重み付けしてパケット通信に利用するスロットを決定することを特徴とする。
(もっと読む)
方向制御装置および方向制御方法
【課題】監視装置の監視範囲内から監視対象が外れることなく、監視装置の向きを、常に監視する監視対象の方向に向けることができる方向制御装置および方向制御方法を提供する。
【解決手段】移動体の現在位置の情報と、監視対象の位置の情報とに基づいて、監視装置を目標の方向に向けるための目標制御量を算出する目標制御量算出手段と、移動体の現在位置の情報と、移動体の経路の情報とに基づいて、移動体の移動経路上における位置を予測し、該予測した移動体の移動経路上の位置の情報と、監視対象の位置の情報とに基づいて、監視装置を目標の方向に向けるための補正制御量を算出し、算出された補正制御量に基づいて、目標方向算出手段によって算出された目標制御量を補正する目標制御量補正手段と、を備える。
(もっと読む)
車両制御装置
【課題】車両が右折又は左折する際に、運転者に違和感を与えることなく、適切に加減速を支援する。
【解決手段】車両の制御装置(10)は、車両(1)の走行環境を取得する走行環境取得手段(101、102、103、104、105、111)と、取得された走行環境に基づいて、車両が交差点への進入地点から退出地点へ至るまでに必要な走行距離を推定する走行距離推定手段(109)と、推定された走行距離に応じて、車両の駆動力及び制動力の少なくとも一方を制御する制御手段(109)とを備える。
(もっと読む)
ナビゲーションシステム
【課題】ナビゲーションシステムが案内する方向と案内標識が示す方向とが異なる場合にユーザの不安感を軽減することができるナビゲーションシステムを提供する。
【解決手段】ナビゲーション装置11は、地図情報と現在位置情報と目的地情報に基づいて設定した案内経路を、ディスプレイ16に表示して交差点における自車両の進行方向を案内する。そして、目的地方面に存在する地名を地名情報として取得し、案内標識の方面案内情報の中に地名情報が少なくとも1つ含まれると共に、地名情報に対応した方面案内情報が示す方向と案内経路に沿って案内する方向とが一致しない場合に、案内経路に沿った道筋の確認を可能ならしめる保証案内を行う。
(もっと読む)
走行情報収集システム及びサーバ装置
【課題】 本発明は、休憩場所の設置場所を示す指針となる走行情報を収集する手段を提供する。
【解決手段】 走行情報収集システムは、複数の車両毎に搭載される運行データ送信装置と、サーバ装置とを備える。運行データ送信装置は、取得部と、連続走行時間計測部と、運行データ送信部とを有する。位置データ取得部は、車両の走行中の位置データを時系列に取得する。連続走行時間計測部は、車両の連続走行時間を計測する。運行データ送信部は、位置データと連続走行時間とを運行データとして無線データ通信により送信する。サーバ装置は、運行データ取得部と、平均時間算出部とを有する。運行データ取得部は、複数の車両の運行データを無線データ通信を介して取得する。平均時間算出部は、位置データに基づく走行路のうちで外部入力により選択された対象を通過した車両の連続走行時間の平均値を運行データに基づいて算出する。
(もっと読む)
夜間車両検知装置
【課題】夜間走行時における対向車両の光源と路上反射物とを識別し、車両前方の対向車両を精度良く検知することのできる夜間車両検知装置を提供する。
【解決手段】撮像手段によって撮像された画像内において、所定の第1閾値よりも大きな輝度を有する高輝度領域及び第1閾値より低く設定された第2閾値よりも大きな輝度を有する低輝度領域を抽出する領域抽出手段と、領域抽出手段の抽出結果に基づき高輝度領域に関連付けられた第1面積及び高輝度領域に近接する低輝度領域に関連付けられた第2面積を算出する面積算出手段と、面積算出手段により算出された第1面積と第2面積との比に基づいて、高輝度領域に対向車両の光源があるか否かを判別する判別手段と、を備える。
(もっと読む)
運転支援装置
【課題】直前の先行車両が自車と無線通信が可能でなくとも、信号機の通過の可否を判定することが可能な運転支援装置を提供する。
【解決手段】運転支援装置10の通信車速度変動情報処理部45が、車車間通信処理装置24が無線通信により取得した前方通信車101の加速度a1と、推定した前方通信車101と自車102との間を走行する車間台数Nとに基づいて自車102の将来の速度Vを予測する。また、交差点通過可否判定部52は、信号情報処理部44が取得した青信号の点灯時間と、通信車速度変動情報処理部45が予測した自車102の将来の速度Vとに基づいて、青信号の点灯時間の経過前に自車102が交差点を通過可能か否かを判定する。このため、直前の車両が無線通信を行えない車両であっても、自車102の将来の速度を予測でき、自車102が交差点を通過可能か否かを判定できる。
(もっと読む)
車両情報提示装置
【課題】交差点を右折する場合や通過する場合に、ドライバが自らの目で視認して交通環境を確認して運転することを妨げることなく、ドライバが必要とするときに適切に必要な情報を提示して安全性を向上する。
【解決手段】情報処理部1は、自車両が抽出した交差点から設定距離以内の範囲にいる場合で、且つ、自車両が停止しており、且つ、ブレーキスイッチがONで、且つ、ドライバの交差点における車両の交通状況の画像の表示要求が確認された場合に、表示部7の表示領域にポップアップウインドウWを表示する。そして、ポップアップウインドウWを表示した後、アクセル操作が所定に行われた場合に、ポップアップウインドウWの表示を終了する。
(もっと読む)
車線指示線検知装置
【課題】車線に沿って路面に描かれた車線指示線にICタグが配置されているときに、そのICタグに車線指示線を特定する情報を予め記憶させておくことなく車線指示線を検知することができる車線指示線検知装置を提供する。
【解決手段】路面20に配置されたICタグ5の車両1に対する相対位置が、送信部が所定の電波を送信してから受信部がICタグ5の発信波を受信するまでの時間に基づいて演算される。路面20の所定の範囲で検知された全てのICタグ5が少なくとも一つの集合に分類され、一つの集合に属するICタグ5のうち最も離間する2つのICタグ5,51及び5,52の距離が第2の所定距離以上であり、最も離間する2つのICタグ5を結ぶ直線53から一つの集合に属する全てのICタグ5までの距離がそれぞれ第3の所定距離以下である場合、一つの集合に属する全てのICタグ5が路面20に描かれた車線指示線22に含まれると推定される。
(もっと読む)
車両用警告装置
【課題】この発明は、自車両に接近する対象物の存在を、運転者の視線移動に時間をかけさせることなく、明確に認知させることができる車両用警告装置を実現することを目的とする。
【解決手段】この発明は、車室内の前方中央に配置された第1の表示部及び第1の警報出力部と、車室内の前方右側に配置された第2の表示部及び第2の警報出力部と、車室内の前方左側に配置された第3の表示部及び第3の警報出力部と、自車両に接近する対象物と衝突する可能性があるかどうかを判定する衝突可能性判定手段と、前記衝突可能性判定手段により自車両に接近する対象物と衝突する可能性があると判定された時に、前記第1〜3の表示部のうち対象物の存在する方向に対応して配置された表示部のみを点滅させ、前記第1〜3の警報出力部のうち対象物の存在する方向に対応して配置された警報出力部のみから警報を出力させるように制御する制御手段とを備えることを特徴とする。
(もっと読む)
341 - 360 / 12,590
[ Back to top ]