
Fターム[3D046HH00]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844)
Fターム[3D046HH00]の下位に属するFターム
ブレーキ初動装置 (1,136)
アクセルペダル操作 (607)
クラッチ操作 (29)
変速機 (289)
操舵状態 (651)
電源状態 (153)
温度 (112)
圧力 (728)
エンジン状態 (242)
燃料供給状態 (68)
乗員、乗降状態 (51)
車外障害物 (520)
車体状態 (2,543)
車輪状態 (1,034)
路面状態 (350)
制動状態 (97)
懸架装置(サスペンション) (30)
アクチュエータ、弁の作動状態 (19)
天候 (20)
Fターム[3D046HH00]に分類される特許
41 - 60 / 165
多軸車両及びその操舵制御装置
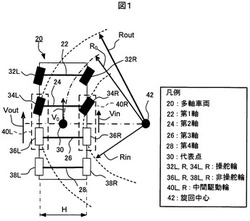
【課題】 6輪車両や8輪車両のように3軸以上の車軸を有する多軸車両において、簡単な構成で小回り性能を向上させる。
【解決手段】 前方車軸22と後方車軸28の間に配置された1以上の中間車軸24、26に設けられた中間駆動輪34L、R、36L、Rを使って旋回を行なう。旋回を行う時、旋回外側の中間駆動輪34L、36Lの速度Voutを車速V0より高く制御し、かつ、旋回内側の中間駆動輪34R、36Rの速度Vinを車速V0より低く制御し、同時に、旋回内側の後方又は前方車輪36R又は32Rに制動をかける。旋回時、中間駆動輪34L、R、36L、R以外の駆動輪32L、R、38L、Rへの動力伝達を切って、これらの駆動輪を遊動状態にする。
(もっと読む)
ブレーキ制振装置

【課題】ブレーキ振動の低減が図れるブレーキ制振装置を提供すること。
【解決手段】ブレーキ作動時に生ずるブレーキ振動を低減するブレーキ制振装置であって、ブレーキ作動時に生ずるブレーキ振動を検出する振動検出センサ2を備えており、振動検出センサ2により検出されたブレーキ振動の周期と異なる周期となるように振動検出センサ2における振動計測のサンプリング周期を設定する。これにより、ブレーキ振動の周期と振動計測のサンプリング周期が同期することが避けられ、ブレーキ振動の波形を精度よく検出することができる。このため、そのブレーキ振動波形に応じてブレーキを加振することによりブレーキ振動を適切に低減することができる。
(もっと読む)
車両制御装置、方法及びコンピュータ読み取り可能な記録媒体
【課題】車両制御にあたり利便性を向上させることが可能な車両制御装置、方法及びその方法をコンピュータに実行させるためのプログラムを記録したコンピュータ読み取り可能な記録媒体を提供する。
【解決手段】車両制御装置1は、自車両が走行車線を逸脱しようとしていると判断した場合、自車両の方向及び速度の少なくとも一方を制御して、自車両の走行車線外で自車両が走行可能な領域に自車両を停止させる。このため、例えば運転者自らが路肩に進入しようとしている場合などには、自車両が車線に戻るように制御されることなく、路肩等に停止させられることとなる。従って、車両制御にあたり利便性を向上させることができる。
(もっと読む)
車両用警報装置
【課題】 警報制動前の車両の加速度によって警報開始前後の加速度の変化量に差異があるために引き起こされる、警報によって運転者が違和感を覚えてしまう問題や、警報効果が小さくなってしまう問題を回避する車両用警報装置を提供すること。
【解決手段】 この車両用警報装置は衝突予測時間tが警報制動時間T1に達したときの自車両の加速度aに基づいて、警報制動中の目標加速度bを決定する。その上で、装置はエンジンのスロットルバルブを全閉にすることにより駆動力を0にする。更に、装置は目標加速度bが達成されないと考えられる場合には目標加速度bを達成するような制動力を付与する。衝突予測時間tが警報制動時間T1に達したときの加速度aに基づいて目標加速度bが適切な値に設定され得るから、警報開始前後の加速度の変化量を適切な量にすることができる。
(もっと読む)
運転支援装置
【課題】運転者が走行環境に対して適切な運転操作を行っていない状況での安全性を向上させる運転支援装置を提供すること。
【解決手段】車両に搭載され、自車両と自車両前方物体との衝突可能性に応じて衝突回避又は衝突衝撃低減のための制御を実行する運転支援装置において、自車両が自車両進行方向前方の一時停止すべき一時停止地点において停止することが困難であると判定されたとき、警報を出力すると共に、上記衝突回避又は衝突衝撃低減のための制御の実行開始タイミングを通常時よりも早める。
(もっと読む)
車両およびその制御方法
【課題】車両制動に際して運転者等が覚えがちな違和感を抑制しつつ、車両制動時における車両の挙動を安定化させる。
【解決手段】ハイブリッド自動車20では、運転者によりブレーキペダル85が踏み込まれたときにマスタシリンダ圧Pmcとポンプ115,125による加圧圧力(増圧分)との双方を用いて運転者により要求されている要求制動力BF*を発生させるときには、ハイブリッド自動車20の制動時における挙動に基づいて設定されたポンプ指令用補正値dcを用いた基本ポンプ指令値dpBの補正(ステップS190)を伴って要求制動力BF*が得られるようにHBS100のブレーキアクチュエータ102が制御される(ステップS170〜S200)。
(もっと読む)
車線逸脱防止装置
【課題】車線逸脱防止制御を乗員の制御感に適合させる。
【解決手段】車線逸脱防止装置は、車線逸脱開始時のヨー角φdepartに基づいて推定逸脱拡大度合いEXdepartを設定し(ステップS21、ステップS22)、その設定した推定逸脱拡大度合いEXdepartに基づいて、車線逸脱防止制御の制御範囲を広げる補正をすることで、車線逸脱防止制御として自車両に付与するヨーモーメントの終了タイミングを遅くする(ステップS23)。
(もっと読む)
交差点交通管制システム
【課題】歩行者等の存在にも配慮した上で、安全で且つ円滑な交差点交通流を実現させる交差点交通管制システムを提供すること。
【解決手段】交差点に進入する車両に対して優先度を設定し、この設定された優先度に応じて交差点を通過するように交差点に進入する車両の速度を制御する交差点交通管制システムにおいて、当該交差点を含む所定領域内又は当該交差点に進入する車両の進行方向に管制対象外の移動体(歩行者等)が存在するとき、a)当該交差点に進入する車両の加速を制限することによって、又は、b)当該交差点に進入する車両の車速を第一の所定速度以下に低減させることによって、当該交差点に進入する車両の通過速度を抑制する。歩行者等が存在するときに、当該交差点に進入する車両と当該歩行者等との交錯可能性が所定レベル以上であると判定されたときには、当該車両の車速を第二の所定速度以下に低減させて徐行させる。
(もっと読む)
車線逸脱防止装置及び車両用前照灯制御装置
【課題】走行車線から自車両が逸脱する場合に、本来の走行車線に対する運転者の認識状態を向上させることができる。
【解決手段】車両は、走行車線に対する自車両の横変位X及びヨー角φに基づいて、走行車線に対する自車両の逸脱傾向を判定し(ステップS4)、その判定結果に基づいて、走行車線に対する自車両の逸脱を防止する逸脱防止制御を行い(ステップS6、ステップS8〜ステップS11)、その一方で、前記横変位X及びヨー角φに基づいて、前照灯の照射角度を制御する(ステップS7)。
(もっと読む)
車両走行制御装置
【課題】車両の加速性能を損なうことなく車両挙動を安定化することが可能な車両走行制御装置を提供する。
【解決手段】車両走行制御装置1は、車両の挙動を安定化するために制動力および駆動力のうちの少なくとも一方を制御する制駆動力制御手段13bと、車両における前輪の駆動力と後輪の駆動力との配分比を制御する駆動力配分制御手段13aとを備えている。車両走行制御装置1では、駆動力配分制御手段13aによる制御を制駆動力制御手段13cによる制御より優先して車両に作用させることを特徴とする。
(もっと読む)
道路勾配推定装置
【課題】道路勾配をより正確に推定することが可能な道路勾配推定装置を提供する。
【解決手段】運転者による減速操作に基づいて推定されたブレーキ制動力に基づいて道路勾配を推定する道路勾配推定装置(S109)であって、減速操作とブレーキ制動力の関係を学習補正する学習補正手段(S106,S107)を備え、前記運転者による減速操作に基づいて推定されたブレーキ制動力は、前記減速操作とブレーキ制動力の関係の学習補正された結果に基づいて求められる。前記学習補正手段は、道路勾配が既知である場所を前記車両が走行しているとき(S105−Y)の減速操作時の減速操作量とブレーキ制動力の関係に基づいて、学習補正する。
(もっと読む)
車両用ブレーキ制御装置
【課題】M/C内部のブレーキ液の消費に起因してドライバのブレーキフィーリングを悪化させてしまうことを防止する。
【解決手段】ブレーキペダルのストローク量が増加し、かつ、差圧制御弁の差圧出力値が前回の差圧出力値よりも低下している場合に、それが回生制動力を液圧制動力にすり替えるためにM/C内のブレーキ液の吸い出しに起因するものであるとする。そして、そのような場合には、差圧出力値を前回の値に保持する。このようにすれば、回生制動力を液圧制動力にすり替えるためにM/C内のブレーキ液の吸い出しに起因して差圧制御弁の差圧出力値が前回の差圧出力値よりも低下した場合に、差圧出力値を前回よりも低下させないように保持することができる。このため、発生させられるW/C圧が階段状に変化することによるブレーキフィーリングの悪化を防止することが可能となる。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】交通流をスムーズにするような運転操作を促す車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両と先行車との余裕時間と車間時間とを用いて先行車に対する接近度合を表すリスクポテンシャルを算出する。トンネルに進入する場合やトンネルから出る場合等、運転者が自然と減速や加速をすることが予測される場合に、リスクポテンシャルを補正する。補正したリスクポテンシャルに基づいてアクセルペダルから発生させる操作反力を算出することにより、リスクポテンシャルを知らせながら交通流をスムーズにするような運転操作を促す。
(もっと読む)
衝突判定装置
【課題】自車両と他車両との衝突が発生する可能性の有無を精度良く判定する。
【解決手段】時間遅れ補正部23は、第1他車両状態抽出部21により抽出された他車両の走行状態に係る走行状態量(例えば、相対速度等)と、第2他車両状態抽出部22により抽出された自車両の走行状態に係る走行状態量(例えば、相対速度等)とを比較し、この比較結果に基づき、通信装置14を介して他車両から受信した車両状態量の時間遅れ量を算出する。時間遅れ補正部23は、設定した時間遅れ量によって、第2他車両状態抽出部22により抽出された他車両の状態に係る他車両状態量を補正する。危険度判定部24は、補正された他車両状態量に基づき、他車両の進行軌跡および走行挙動を予測し、自車両の走行に対する他車両の危険度を判定する。
(もっと読む)
ブレーキ装置
【課題】第1のアクチュエータ駆動装置50,第2のアクチュエータ駆動装置60の少なくともいずれか一方に確実に電力を供給する。
【解決手段】主電源線100,補助電源線101,第1の電力供給線102,第2の電力供給線103,第1のリレー32,第2のリレー33のいずれか一つの故障が発生した場合に、故障部位を切り離す、あるいは故障部位と故障していない部位とを分断する、あるいは故障部位への電力供給を遮断する、あるいは電力供給できなくなった部位に電力を供給するように、第1〜第3のリレー32,33,34の開閉を制御する。
(もっと読む)
走行制御装置および故障診断装置
【課題】 電磁誘導型車輪速センサの外部要因に基づくノイズによる制御性の低下を抑制することができる走行制御装置、および、このノイズによる故障診断精度の低下を抑制することができる故障診断装置を提供する。
【解決手段】 電磁誘導型の車輪速センサ20の出力を基に、ブレーキアクチュエータ40を駆動して各ホイールシリンダ41へ伝達されるブレーキ油圧を調整することにより、制動力を制御することで車両挙動の制御を行う制動制御ECU1は、ナビゲーションECU30の出力から車輪速センサ20が外部ノイズの影響を受けやすい地域を走行中であることを外部ノイズ予測部11により予測し、当該地域を走行中は、故障判定ないし車両挙動制御を一時的に禁止するか、故障判定・車両挙動制御のしきい値を変更する。
(もっと読む)
制動力制御装置
【課題】打音の発生を高精度に検出し、打音を抑制する制動力制御装置を提供することを課題とする。
【解決手段】ディスクブレーキによる制動力を制御する制動力制御装置1において、ディスクブレーキにおける打音に関する情報を検出する打音情報検出手段11と、打音情報検出手段11で検出した打音に関する情報に基づいて打音発生の有無を判定する打音判定手段31aとを備え、打音判定手段31aで打音発生と判定した場合に打音を抑制するための制動制御を行うことを特徴とする。
(もっと読む)
車体姿勢制御装置
【課題】車両の旋回時におけるローリングとピッチングとを共に制御し得る車体姿勢制御装置を得る。
【解決手段】ロール角取得部により取得された車体6のロール角を適切な大きさに抑制するロール制御部と、ロール角に応じて車体のピッチ角を制御するロール角対応ピッチ角制御部とを設ける。ロール制御部を、ショックアブソーバ28の減衰特性の制御によりローリングを抑制する減衰特性依拠ロール制御部とし、ロール角対応ピッチ角制御部を、過渡旋回状態においては、ショックアブソーバ28の減衰特性の制御により、定常旋回状態においては、ブレーキ制御ECU20による前後加速度の制御により、それぞれピッチ角を制御するものとする。ロール角対応ピッチ角制御部を、過渡旋回状態および定常旋回状態の両方において前後加速度の制御によりピッチ角を制御するものとすることもできる。
(もっと読む)
シートベルト装置
【課題】旋回制御措置の作動時にプリテンショナ機構を作動させるシートベルト装置において、プリテンショナ機構を頻繁に作動させて乗員に違和感を与えることを防止する。
【解決手段】ウエビング2aに所定の第1張力を付与する第1プリテンショナ機構2cと、第1プリテンショナ機構2cを作動させるプリテンショナコントローラ9とを備えたシートベルト装置2であって、車両Vの旋回時にその走行状態を安定させるために少なくともブレーキ装置3のブレーキ力を制御して車両の走行状態を制御するDSCコントローラ7と、DSCコントローラ7が作動を開始したときにそのDSC作動時間を計時するDSC作動時間計測部92とをさらに備え、プリテンショナコントローラ9は、DSCコントローラ7の作動後、DSC作動時間計測部92により計時されたDSC作動時間が所定時間を経過したときに第1プリテンショナ機構2cを作動させる。
(もっと読む)
車両の走行支援装置
【課題】制駆動機構により得られる制駆動力のハンチングを抑制して、車両の乗り心地を良好とする。
【解決手段】第1制駆動機構及び第2制駆動機構により制駆動される車両に搭載され、第1制駆動機構及び第2制駆動機構から得られる制駆動力を制御する走行支援装置10であって、車両全体として得られるべき総制駆動力を示す総制駆動力指令値を求める総制駆動力指令値演算部12と、総制駆動力における第1制駆動機構の寄与分を示す第1制駆動力指令値を設定する第1制駆動力設定部13と、総制駆動力における第2制駆動機構の寄与分を示す第2制駆動力指令値として、総制駆動力指令値と第1制駆動力指令値との差分を設定する第2制駆動力設定部14と、を備える。
(もっと読む)
41 - 60 / 165
[ Back to top ]