
Fターム[3D046HH00]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844)
Fターム[3D046HH00]の下位に属するFターム
ブレーキ初動装置 (1,136)
アクセルペダル操作 (607)
クラッチ操作 (29)
変速機 (289)
操舵状態 (651)
電源状態 (153)
温度 (112)
圧力 (728)
エンジン状態 (242)
燃料供給状態 (68)
乗員、乗降状態 (51)
車外障害物 (520)
車体状態 (2,543)
車輪状態 (1,034)
路面状態 (350)
制動状態 (97)
懸架装置(サスペンション) (30)
アクチュエータ、弁の作動状態 (19)
天候 (20)
Fターム[3D046HH00]に分類される特許
21 - 40 / 165
運転者状態推定装置及び運転支援装置
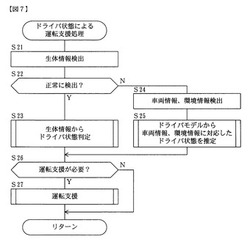
【課題】生体情報が正常に測定できない場合であっても、生体情報に基づいた運転者の状態の推定を行う。
【解決手段】ドライバの生体情報を計測し、正常に生体情報が計測できている場合には、計測した生体情報からドライバの状態(正常状態、覚醒度低下等)を推定する。一方、推定したドライバの状態に対応して、正常に生体情報を計測した際の運転状況(車両情報と環境情報)を蓄積することで、生体情報に基づくドライバ状態を運転状況から推定するドライバモデルを構築しておく。ドライバの生体情報の検出が正常である場合には、計測した生体情報に基づいて現在のドライバの状態を推定し、正常でない場合には、ドライバモデルを使用して現在の運転状況からドライバの状態を推定する。
(もっと読む)
ホイールベース長設定装置

【課題】搭載される車両の実際のホイールベース長の差異に起因した車両性能のばらつきを抑制できると共に、搭載される車両の実際のホイールベース長に対応可能に構成することによるコスト増大を抑制できるホイールベース長設定装置を提供する。
【解決手段】ホイールベース長設定装置のECUは、車両Cの前輪が路面上の異物Fを踏んだ場合には、そのときの前側検出時間TVWF及び前側検出時車体速度を検出する。また、ECUは、車両Cの後輪が路面上の異物Fを踏んだ場合には、そのときの後側検出時間TVWR及び後側検出時車体速度を検出する。そして、ECUは、前側検出時間TVWF及び前側検出時車体速度と、後側検出時間TVWR及び後側検出時車体速度とから算出用ホイールベース長を算出し、該算出用ホイールベース長に基づきホイールベース長を設定する。
(もっと読む)
車線逸脱防止装置
【課題】車線逸脱防止制御の開始時点から所望のヨーモーメントを自車両に付与する。
【解決手段】車線逸脱防止装置は、車線逸脱傾向判定手段が逸脱傾向にあると判定した場合(ステップS7)、制動力を前後輪に配分しつつ、左右輪で制動力差を前記ブレーキ装置により発生させて、自車両にヨーモーメントを付与し、走行車線に対して自車両が逸脱するのを防止する車線逸脱防止制御を行う(ステップS12)。そして、車線逸脱防止装置は、ブレーキ装置のブレーキ温度を検出し(ステップS4)、検出したブレーキ温度に基づいて、前後輪における制動力の配分(前後輪液圧配分比FRratio)を補正する(ステップS11)。
(もっと読む)
運転支援装置
【課題】人の集まる場所の周辺を車輌が走行する場合に運転支援内容を変更してより積極的な運転支援を行う運転支援装置を提供すること。
【解決手段】運転者による運転操作を支援する運転支援手段8、9、10を備える運転支援装置100は、自車位置を認識する自車位置認識手段11と、人の集まる場所に係る地域情報を取得する地域情報取得手段12と、地域情報取得手段12が取得した地域情報に基づいて自車位置認識手段11により認識した自車位置が注意を必要とする位置であるか否かを判定する注意要否判定手段13と、注意要否判定手段13による判定結果に基づいて運転支援手段8、9、10の運転支援特性を変更する運転支援特性制御手段14と、を備える。
(もっと読む)
運転支援装置
【課題】運転者が車両を一時停止させるか否かを精度よく判別することができ、適切な運転支援を提供することが可能な運転支援装置を提供する。
【解決手段】本発明の一実施形態に係る運転支援装置1は、一時停止位置の手前における運転者の運転操作を支援する支援手段34,22と、一時停止位置に対する運転者の注視行動を検出する注視行動検出手段20,16とを備え、支援手段34,22は、注視行動検出手段20,16により検出される車両減速中における注視行動の有無に応じて、運転操作の支援仕様を切り替える。
(もっと読む)
車線逸脱防止装置
【課題】車線逸脱防止制御の終了後の車両姿勢のばらつきを抑制する。
【解決手段】車線逸脱防止装置は、車線逸脱防止制御の開始を検出した場合(ステップS21)、その時点の車両状態及び走行環境のうちの少なくとも一方を検出し(ステップS22)、検出した車両状態及び走行環境のうちの少なくとも一方に基づいて、車両が走行車線に戻る際の車線逸脱防止制御の終了タイミングを補正する(ステップS24)。
(もっと読む)
車両の走行制御装置
【課題】先行車両と自車両との車間距離の変化の度合いに応じて適切な自車両の加減速度を設定して乗員が違和感を感じないようにすることを課題とする。
【解決手段】自車両前方の先行車両と自車両との車間距離が目標車間距離を維持するように自車両の走行状態を制御する制御ユニット40は、先行車両と自車両との車間距離と目標車間距離との偏差に基いて自車両の基本加減速度を設定し、先行車両と自車両との車間距離の変化の度合いを検出し、基本加減速度を車間距離の変化の度合いに基いて補正することにより自車両の最終加減速度を設定し、そして、その最終加減速度で自車両の走行状態を制御する。
(もっと読む)
車両の走行制御装置
【課題】カーブ走行中において車速制御と旋回走行制御との協調を図る。
【解決手段】走行制御装置は、制駆動力制御により、目標車速に実車速を一致させる制御を行う車速制御と、カーブ内で車両を減速制御する旋回走行制御とを行っており、旋回走行制御の終了を検出した場合(ステップS41)、該旋回走行制御の終了時点の車速に基づいて、車速制御における目標車速を減少補正する(ステップS44、ステップS47)。
(もっと読む)
車両の走行安全装置
【課題】カーブ進入時の速度調整を運転者の意図に合わせて操作し易くする。
【解決手段】道路データに基づき自車両の進行方向に存在するカーブの形状を認識するカーブ認識部14と、カーブを適正に通過可能な適正車両状態を設定する適正車両状態設定部16と、車両状態検出部13が検出した車両状態と適正車両状態設定部16が設定した適正車両状態とを比較する比較部17と、自車両の車両状態が適正車両状態にないときに運転者のブレーキ操作が検出された場合にはブレーキ装置のブレーキ圧を増圧するブレーキアシスト制御部22と、を備え、ブレーキアシスト制御部22は、比較部17の比較結果に基づいて初期ブレーキアシスト加圧量を算出するとともに、初期ブレーキアシスト加圧量に基づくブレーキアシスト制御開始後に運転者によるブレーキ操作量の変化が検出された場合には運転者のブレーキ操作量に比例してブレーキアシスト加圧量を変化させる。
(もっと読む)
車両用走行制御装置
【課題】本発明は、車両用走行制御装置に係り、車両運転者の脇見時にも車両の安全走行を確保することにある。
【解決手段】車両運転者によりメインスイッチがオン操作された場合(ステップ100の肯定判定時)に、自車両を走行車線に沿って走行させる車線維持制御の実行を許可する(ステップ102)。また、顔向きカメラによる撮像画像を処理することにより運転者が顔を車両正面方向に向けない脇見状態の有無を判別する。そして、メインスイッチがオン操作されていない状況において、車両運転者が脇見状態にあると判別される場合(ステップ104の否定判定時)にも、車線維持制御の実行を許可する(ステップ102)。
(もっと読む)
車両制御装置
【課題】電動スタビライザーとMATの協調制御を行う車両制御装置を提供することを目的とする。
【解決手段】タービンホイールにより過給を行うターボ過給機104と、電気モータ108により前記タービンホイールを駆動することにより、前記ターボ過給機104による過給をアシストする過給アシスト手段603と、電動駆動手段を用いてスタビライザーの特性を制御するスタビライザー制御手段605と、前記スタビライザー制御手段605が動作中に、前記過給アシスト手段603による過給のアシストを停止する過給アシスト停止手段602とを有することを特徴とする車両制御装置1。
(もっと読む)
車両制御システム
【課題】一般的な鉄道車両が搭載している車上で停止ブレーキを作成することができる設備のみで車両の定時運行を実現する列車自動運転制御を提供する。
【解決手段】停車位置に停車するために考えられる複数のブレーキパターンを持っている、あるいは複数のブレーキパターンを動的に作成することができ、また、車両のブレーキ段と地形の勾配情報から求まる当該列車の実減速度に基づき次の停車位置に到着する時間を予測する手段を持つ車上制御装置を有するシステムにおいて、車両の現在位置から次の停車位置に到着する到着予測時間と、ダイヤにより定まっている次の停車位置に到着する到着予定時間を比較し、駆動力もしくはブレーキ力を制御することにより、車両の定時運行を自動的に実現する。
(もっと読む)
車両用ブレーキ装置
【課題】ポンプの異常を診断する際に、流路の開閉を行うバルブの作動回数を可及的に低減させて、耐久性の低下を抑制する。
【解決手段】リザーバタンク2aとホイールシリンダ3iとの間に、正方向に回転駆動するときにホイールシリンダ3iの側にフルードを吐出し、逆方向に回転駆動するときにリザーバタンク2aの側にフルードを吐出するギアポンプ5と、一方向に回転駆動するときにホイールシリンダ3iの側にフルードを吐出するプランジャポンプ6と、を並列に介装する。そして、運転者のブレーキ操作がない間に、ギアポンプ5及びプランジャポンプ6間でフルードが還流するように、ギアポンプ5をリザーバタンク2aの側への吐出方向に回転駆動すると共に、プランジャポンプ6をホイールシリンダ3iの側への吐出方向に回転駆動し、夫々の回転状態に基づいて異常を診断することを特徴とする。
(もっと読む)
車両走行制御装置及び車両走行制御方法
【課題】車両が路面の凸部を通過する際の衝撃を和らげることができる車両走行制御装置及び車両走行制御方法を提供する。
【解決手段】車両の前方路面にある凸部の形状を検出する凸部検出手段と、前記凸部の形状に基づいて加速度を設定する減速加速度設定手段と、前記凸部から第一の距離手前の地点を第一地点、前記第一地点から第二の距離手前の地点を第二地点として設定する地点設定手段と、前記第二地点から前記第一地点の間において前記車両を前記加速度で減速させ、前記第一地点に到達すると前記車両の減速を解除する速度制御手段と、を備える車両走行制御装置。
(もっと読む)
鉄道用ホーム柵の制御システム
【課題】 列車ドア及びホーム柵の開閉タイミングが遅れなくできる鉄道用ホーム柵の制御システムを得ること。
【解決手段】 駅のホーム側に設置されたホーム柵21と車両ドア10cの開閉を、総合制御盤30を介して制御する鉄道用ホーム柵の制御システムにおいて、列車10がホーム3に進入して予め定められ距離内に停車したことを検知する停止検知部41と、検知手段の検知に基づいてホーム柵21を開放する開放部30aと、ホーム柵21の開放が開始されたことに基づいて列車自動停止装置50を介して列車にブレーキをかける停止部30bと、を備えたものである。
(もっと読む)
車両速度制御システム
【課題】途中で曲率が変化するカーブにおいても、適切に車両の速度を制御する。
【解決手段】曲率が変化するカーブをナビゲーション装置2により自車両の進行方向に検出し、制御点設定部10によりそのカーブ上に複数の制御点を設定する。こうして設定された制御点ごとに、曲率算出部11により曲率値を求めると共に、自車両の目標横加速度を目標横加速度設定部12により設定する。この曲率値と目標横加速度に基づいて、当該カーブを走行する際の自車両の目標速度を目標速度算出部13により算出し、算出された目標速度に基づいて、車両制御部16により自車両の速度を制御する。
(もっと読む)
車両停止装置
【課題】 運転者の意識低下を検出したとき、他の車両の通行の妨げにならない場所に車両を強制停止する
【解決手段】 走行中に運転者の意識低下(居眠り等)を検出した場合(S14:YES)、前方の道路周辺状況を検出して目標停止位置を決定する(S18)。この目標停止位置は、道路端の検出有無、障害物の有無、白線の有無、路肩幅、適正減速度等に基づいて決定する。そして、目標停止位置に停止するために必要な横移動距離Wに基づいてタイヤ切れ角δを算出し(S22)、舵角制御とブレーキ制御とにより車両を目標停止位置に自動操縦する(S22〜S24)。舵角制御不能の場合には(S21:NO)、左右輪に制動力差を発生させて車両の向きを変えて目標停止位置に案内する。
(もっと読む)
車両制御装置
【課題】カーブを走行する際、通過可能な車速となるように自車を減速させることができる車両制御装置を提供する。
【解決手段】カーブ道路を走行する際、そのカーブ道路に対して設定した目標速度Vs0_tまで自車を加減速するための目標加減速度dVs0/dtを算出し、自車の現在の速度Vs0と目標速度Vs0_tとを比較した結果に基づいて、自車に発生する加減速度が目標加減速度dVs0/dtとなるように加減速制御を行う。
(もっと読む)
電動パーキングブレーキ装置
【課題】後面衝突時に電動アクチュエータから他の部品を保護しかつ制動力を維持可能な電動パーキングブレーキを提供する。
【解決手段】車両の後輪に設けられたパーキングブレーキ10と、パーキングブレーキ10を駆動して制動力を発生させる電動アクチュエータ20と、可撓性を有し、電動アクチュエータ20の前部とパーキングブレーキ10とにわたして設けられ、電動アクチュエータ20が発生する駆動力をパーキングブレーキ10に伝達する駆動力伝達ケーブル21とを備える電動パーキングブレーキ装置において、電動アクチュエータ20は、後輪の車軸よりに後方側に配置され、車体に対して前進する方向の相対変位に応じて、その少なくとも後端部が車体から脱落可能に支持される構成とする。
(もっと読む)
車両の制御装置
【課題】運転者の操作に対する応答遅れを低減させることの可能な車両の制御装置を提供する。
【解決手段】運転者が前記車両の操作機器を操作しようとする際に生じる筋電信号を検出する検出手段(S10)と、前記筋電信号に基づいて前記操作機器の操作に対応した前記車両の制御を行う制御部(S20)とを備え、運転者により前記操作機器に対する操作が実際に行なわれたとき(S40−肯定)に、前記操作機器の操作に対応する前記車両の運転状態の変化が生じるように制御される(S50)。
(もっと読む)
21 - 40 / 165
[ Back to top ]