
Fターム[5J070BD01]の内容
レーダ方式及びその細部 (42,132) | 組合せ (788) | 一次レーダと一次レーダ (279)
Fターム[5J070BD01]の下位に属するFターム
バイ又はマルチスタチックレーダ (72)
Fターム[5J070BD01]に分類される特許
181 - 200 / 207
追尾装置及び目標へのセンサ割り当て方法

【課題】 弾道軌道目標に対する追尾性能を向上させる。
【解決手段】 目標類別・センサ制御処理部80は、RCS算出処理部60からのRCSがついた航跡諸元と統合航跡諸元の中から、RCSのしきい値よりも大きいRCSを持つ航跡諸元と統合航跡諸元を抽出し、抽出したRCSの大きい航跡諸元と統合航跡諸元に関連するレンジ方向及びクロスレンジ方向のセンサ配置情報を用いて、目標の進行方向がレンジ方向のセンサの観測ビームを集中的に割り当てるセンサ制御信号をセンサ群20に出力し、目標の速度ベクトルにより弾頭とブースターを類別し、弾頭に観測ビームを集中的に割り当てるセンサ制御信号をセンサ群20に出力する。
(もっと読む)
レーダ型探査装置

【課題】 ハンドヘルドタイプの探査装置に応用した場合において、操作者に対して地中埋設物の探知状況をリアルタイムに告知することができるレーダ型探査装置を提供すること。
【解決手段】 送信アンテナと受信アンテナを含むレーダユニットの複数が、地表面に沿って走査することができる筐体部52に装着されている。操作者Wはアーム部53の長手方向に直交するようにして取り付けられた一対のハンドル57を把持し、アーム部53を左右に振る動作を実行することで、アーム部の先端部に取り付けられた前記筐体部52を地表面gに沿って走査させることができる。これにより複数のレーダユニットによりターゲットを捕捉する動作が実行される。前記各レーダユニットにより得られる地中埋設物の探査結果をそれぞれ二値化して、その論理積を得る演算手段と、前記演算手段により得られる論理積に基づいて、操作者に対する告知手段を駆動する駆動手段とが具備される。
(もっと読む)
追尾モデルの管理
たとえばレーダによって検出された航空機など、遠方の目標の複数の軌跡を同時に維持する方法および装置が開示されている。それぞれの軌跡は、追尾目標についての、考えうる様々な力学的特性を示すモデルプロセスのセットにより、維持される。モデルは、完全にまたは大部分、互いに独立に振る舞うことができる。新たなセンサ情報を用いてモデルを更新するべきか否かは、それぞれの軌跡内のそれぞれのモデルについて、別個に決定される。 (もっと読む)
ネットワークレーダシステム
【課題】 従来のネットワークレーダシステムでは複数レーダを管理・制御する為に中央処理系の存在を前提としていた。この為、1箇所の中央処理装置の過負荷による性能劣化と機器障害によるダウン、また当該中央処理系に繋がるデータ伝送回線へのデータ集中度が各レーダ装置とを結ぶ他のデータ伝送回線に比し高く、システム全体としてバランスに欠け、ネットワーク障害に対する脆弱性の問題があった。
【解決手段】 レーダ装置10に複数レーダ管理制御サブシステム20を付置し、また各種のデータを表示する表示装置22とデータ蓄積装置23が接続される。これら一連のシステムによりレーダサブシステム200を構成し、通信制御装置30を介してネットワーク60へ接続し、これらレーダサブシステム200の集合体がネットワークレーダシステム100を構成する。さらに、隣接レーダサブシステム同士をネットワーク予備回線50で接続した。
(もっと読む)
気象予測システム及びその同化処理方法
【課題】 レーダ波が遮蔽される観測不能領域での雨水量データの同化を適切に補正する。
【解決手段】 レーダ観測結果から予め高度別に区分された複数階層の雨水量データを取得しておく。同化開始により、下層雨水量データを取り込んで(S31)、観測地点毎に雨の有無を判定し(S32)、雨があると判定された場合には、その地点の下層全てについて水蒸気同化を行う(S33)。この水蒸気同化処理が完了した場合、またはS32で雨はないと判定された場合には、上層雨水量データを取り込んで(S34)、再度、雨水量を閾値と比較して雨がの有無を判定する(S35)。S35で雨があると判定された場合には、雨が観測された地点の下層のうち、水蒸気同化を一度も行っていない地点に対して水蒸気同化を行った後(S36)、S34に戻り、次の階層の雨水量データを取り込む。また、S35で雨はないと判定された場合には、データ同化処理は完了したものとする。
(もっと読む)
分散型のレーダ情報処理システム
【課題】システムの一部に故障が生じてもシステムの全面的な停止を回避することができ、システムの変更に対しても柔軟に対応でき、短期間で製造できる安価な分散型のレーダ情報処理システムを提供する。
【解決手段】レーダ装置から取得したレーダ情報を処理することにより航空管制に供する情報を生成する分散型のレーダ情報処理システムであって、流れるデータの種類に応じて設けられた複数のデータバス61〜64と、複数のデータバスで区切ることにより階層化された複数の層の各々に分散して割り当てられ、各々が自層を形成する2つのデータバスに接続されて所定の機能A〜機能Eを実現する複数のアプリケーションと、複数のアプリケーションの間の接続を制御する分散統合インタフェース30とを備えている。
(もっと読む)
同一航跡判定装置
【課題】航跡作成装置が異なるセンサであっても、処理負荷を削減し、なおかつ、それまでに得られた信頼度を蓄積し、多くの航跡が密集した状態等、位置運動情報(航跡間の距離及び速度)に差がつかない状況においても、安定した確度の高い相関結果を得ることのできる同一航跡判定装置を得る。
【解決手段】従来の同一航跡判定装置の位置相関判定器7に目標類識別データ選択器11および目標類識別相関判定器12を取りつけ、位置相関判定で絞り込まれた相関の可能性がある航跡対を、目標特徴量から類推される目標類識別結果を用いてさらに絞り込む。次に従来の同一航跡判定装置の尤度算出器14に信頼度算出器15を、信頼度算出器15に信頼度記憶器16を取りつけ、航跡データ対についての信頼度を尤度算出器14で算出された尤度、及び信頼度記憶器16に記憶されている1サンプリグ前の信頼度を用いて算出する。
(もっと読む)
レーダアレイを較正するシステム及び技法
複数のレーダを較正するシステム及び技法が、複数の物標からのモノスタティックエコーリターンから導出される1組の連立方程式を提供する。連立方程式の解が、複数のレーダに関連する相対位置較正係数及び時間遅延較正係数を提供する。相対位置較正係数及び時間遅延較正係数により、複数のレーダを、理想的なコヒーレント処理利得と比較してごく少量の処理利得損失でコヒーレントに結合することができる。 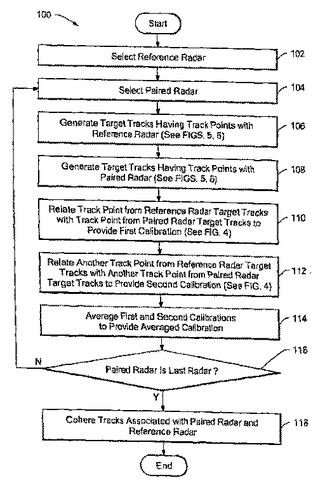 (もっと読む)
(もっと読む)
多目的レーダ監視システム
本発明は森林火災のようなRCSが低い対象物(110,140,150,160,190)を検出するレーダシステム(100)を開示する。このシステムは、機構的に固定された複数のアンテナ(220)を備え、レーダエネルギーを送信する複数の送信局(120)と、機構的に固定された複数のアンテナ(220)を備え、前記複数の送信局から送信されたレーダエネルギーの反射波を受信する複数の受信局(130)とを有する。前記送信局と前記受信局との複数アンテナ(220)は地面に対して実質的には平行なメインビーム(221)をもち、前記複数の受信局の少なくともサブセットには、第1と第2の受信信号を記録する手段と、前記信号の内の一方を前記信号の他方から減算する手段とを備える。前記送信局と前記受信局とは10〜100MHzの周波数範囲で機能するように構成されている。 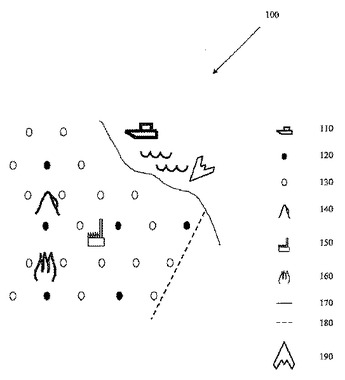 (もっと読む)
(もっと読む)
レーダー装置
【要 約】
【課 題】本発明は、簡易な構成で対象物までの距離及び方向を検出することを目的とする。
【解決手段】送信波を送信し対象物で反射された受信波を受信する第1及び第2の送受信回路を有し、前記第1の送受信回路は第1の送受信回路の送信した送信波が対象物で反射された受信波を受信すると共に前記第2の送受信回路が送信した送信波が対象物で反射された受信波を受信し、第2の送受信回路は当該第2の送受信回路の送信した送信波が対象物で反射された受信波を受信することを特徴とする。前記第1及び第2の送受信回路を用いて前記第1及び第2の送受信回路から対象物までの距離を算出し、算出した対象物までの距離に余弦定理を適用することで、送受信回路及び対象物を結ぶ直線と、2つの送受信回路を相互に結ぶ直線との成す角度を算出する。
(もっと読む)
マルチレーダシステム及びその制御方法
【課題】マルチレーダシステムの管制所に、航空機の正確な位置を正確に表示する。
【解決手段】GPS衛星1からのGPS信号をGPSアンテナ21、22で受信し、GPSクロック受信機31、32が正確な標準時刻(任意のタイムゾーン)をNTP(ネットワークタイムプロトコル)にてLAN91、92に出力する。LAN91、92に接続される信号処理プロセッサ41、42は、GPSクロック受信機31、32から出力される標準時刻を使用して、自身のシステムクロックを較正する。タイムスタンプ生成部101、102では、レーダ51、52で検出した航空機の位置情報に、航空機を検出した時刻をGPSクロックによるタイムスタンプとして付与する。タイムスタンプを付与された航空機位置データは、WAN6経由で情報処理装置7に伝送される。情報処理装置7では、レーダからの航空機位置データに対して、追尾処理(相関、予測、虚偽目標棄却)、位置算出処理を実行する。
(もっと読む)
車両用のレーダーセンサ
周波数変調されたレーダー信号を送受信する少なくとも1つの送受信器(14、16)と、位置測定された対象物との間隔(di)および相対速度(vi)を計算する評価器(24、48)とを備える、車両用のレーダーセンサにおいて、相対速度(vi’)を独立して測定する統合されたドップラーレーダーシステム(26、42、44)を特徴とする。 (もっと読む)
防空シミュレーションシステム
【課題】防空要素の配置にかかるユーザの手間を軽減できるようにし、これにより便宜の向上を図った防空シミュレーションシステムを提供すること。
【解決手段】ユーザが設定した防空エリアをメッシュ状に複数の小領域に分割し、各小領域にレーダ11cを配置したと仮定した場合のレーダ覆域面積を、デジタルマップの3次元データに基づいて算出する。その結果を、メッシュの表示色を階調的に変化させることによりGUI表示する。そして、ユーザにより選択指定されたメッシュのそれぞれにつき、シミュレーションにより防空指標を算出してその結果をユーザに提示する。
(もっと読む)
統合されたデータ伝送手段を備えたレーダ装置
本発明は、たとえば自動車で使用するための、1つ以上の個々のレーダからなるレーダ装置に関する。前記個々のレーダの少なくとも1が、同時に操作され得る、感知要素及びデータ通信要素の両方を含む。  (もっと読む)
(もっと読む)
タイミング情報の取得およびレンジングを行うための装置、システムおよび方法
システムは、第1装置(1)と、1つまたは複数の第2装置(2)とを含む。第1信号(61)および第2信号(62)が、第1装置(1)から第2装置(2)へと送信され、第3信号(63)が、第2装置から第1装置へと送信される。これらの信号(61,62,64)が送信され受信される時刻が、測定され、第1および第2装置の第1および第2ローカルクロックにおける異なるクロック速度の修正を含むタイミング情報の計算に用いられる。 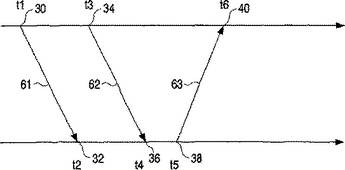 (もっと読む)
(もっと読む)
レーダ装置
【課題】要求覆域に対して各レーダで探知すべき覆域を最適化し、短いデータ更新間隔で要求覆域を探知できるレーダ装置を得る。
【解決手段】要求覆域を保持する要求覆域保持手段7と、レーダ情報を保持するレーダ情報保持手段8と、覆域境界の組を保持する覆域境界保持手段10と、前記要求覆域、レーダ情報、覆域境界の組に基きデータ更新間隔を評価するデータ更新間隔評価手段11と、隣接するレーダのデータ更新間隔を比較し大きい方を出力する隣接レーダデータ更新間隔比較手段13と、隣接する一方のレーダのデータ更新間隔が減少し、隣接する他方のレーダのデータ更新間隔が増加するように、両者の間の覆域境界を修正する覆域境界修正手段14と、前記要求覆域、レーダ情報、修正後の覆域境界の組に基き各レーダのレーダ諸元を算出するレーダ諸元算出手段16と、前記レーダ諸元に基き、各レーダを制御するレーダ制御手段17とを設けた。
(もっと読む)
追尾装置及び追尾処理方法
【課題】中央の追尾フィルタとローカルセンサの制限された伝送容量を持つ環境においてもセンサシステム全体の高い追尾性能を得る。
【解決手段】目標群11を観測して目標の運動諸元を推定するセンサ群12と、センサ群からの情報を用いてセンサの優先度を算出する航跡情報評価器13と、センサの優先度に基づいて各センサから伝送する情報の出力内容並びに伝送容量を制御する通信伝送量評価器14と、センサ群12からの出力内容並びに伝送容量が制御された情報を入力し、各目標毎並びに各センサ毎に整理する観測情報・航跡情報統合器15と、各目標毎並びに各センサ毎に整理された情報を用いて各目標毎に追尾計算を行い目標の航跡情報を更新する中央の追尾フィルタ16と、各目標の更新後の航跡情報および各目標毎並びに各センサ毎に整理された観測情報を用いてセンサと目標に係る評価値を算出してセンサ群の動作を制御する追尾性能評価器17とを備える。
(もっと読む)
物標検出装置
【課題】 物標を高速に検知することが可能な物標検出装置を提供する。
【解決手段】 第1レーダ100aの演算結果は、第2レーダ100bの演算結果よりも短い時間で得ることができる。この物標検出装置では、第1及び第2レーダの重複範囲R2bにおいて物標の存在が確定した場合には、次の物標の存在の有無は、低い確度であっても確定できる。第1レーダ100aと第2レーダ100bを上述のように用いることにより、物標を高速に検知できる。
(もっと読む)
近距離レーダー測定用のマルチスタティックセンサ装置およびこのセンサ装置の駆動方法
対象物までの距離を測定するマルチスタティックセンサ装置は、送信ユニット(Tn)および受信ユニット(Rm)を有しており、これらはそれぞれ1つずつ高周波数発振器(HFO‐Tn,HFO‐Rm)およびパルス発生器(PG‐Tn,PG‐Rm)を有している。パルス発生器(PG‐Tn,PG‐Rm)には信号発生器からクロック信号(TS,RS)が供給され、ここでクロック信号(TS,RS)は共通のデータバス(B)を介して送信ユニット(Tn)および受信ユニット(Rm)へ伝送される。これにより高周波数発振器(HFO‐Tn,HFO‐Rm)の高周波数信号の確定的な位相比が形成される。
さらに上述のセンサ装置の駆動方法では、まず2つのクロック信号が共通のデータバス(B)を介して送信ユニットおよび受信ユニットへ供給される。次に送信ユニットから信号が対象物へ送信される。さらにデータバス(B)を介して受信ユニット(Rm)を通って得られたクロック信号が対象物(O)での反射信号と混合され、ここから評価可能な測定信号が形成される。ここで距離軸線での測定信号のキャリブレーションは共通のデータバスのクロック信号のゼロ点を求めることにより行われる。これによりデータバスを介した2つのクロック信号の位相が比較される。 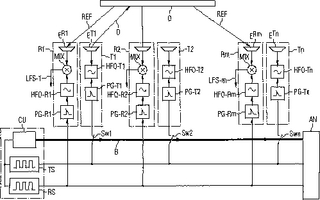 (もっと読む)
(もっと読む)
2つの送−受信所の間の距離を求める方法及びこの方法を実施するための送−受信所
1. 2つの送−受信所の間の距離を求める方法、及びこの方法を実施するための送−受信所。
2.1 送−受信所は、車両技術において、通常鍵なし錠装置において、電子鍵モジュール又は鍵モジュールを確認する評価装置として使用される。明確な確認番号により評価装置に割当てられる鍵モジュールが評価装置の近くにない時、錠装置の不活動化が阻止される。評価装置と鍵モジュールとの間の交信は、送−受信所間におけるデータ電報の伝送によって行われる。新しい方法は、送−受信所間の距離を簡単に求めるのを可能にする。
2.2.新しい方法では、少なくとも3つのデータ電報が送−受信所の間で交互に伝送され、少なくとも3つのデータ電報の各データビットに、当該データ電報の受信の際、それぞれのデータビットの受信の時点にフリーランニングカウンタの計数状態に相当する計数値が割当てられ、少なくとも3つのデータ電報の各々に、当該データ電報の受信中に求められる計数値の和又は平均値に相当する計数和が割当てられ、計数和の重み付けされる加算による和数が、送−受信所間の距離の尺度として形成される。  (もっと読む)
(もっと読む)
181 - 200 / 207
[ Back to top ]