
移動体用位置情報取得装置
【課題】自己の現在位置情報を高い精度で取得し、車両制御等に適用する際の信頼性を高める。
【解決手段】自車位置計算部10は、GPSセンサ3、方位センサ4、距離センサ5からの信号に基づいて、自車の実世界における現在位置を測位する。マップマッチング処理部12は、パターンマッチングの手法により自車が走行している道路を推定する。安全制御処理部13は、レーダ7からの検出結果(絶対位置が既知の固定対象物に対する自車の距離)を利用して、推定道路上における自車の存在位置の再度の判断を行って現在位置を特定すると共に、判断された自車の現在位置情報の信頼度を算出し、それら情報をライト制御部9に出力する。
【解決手段】自車位置計算部10は、GPSセンサ3、方位センサ4、距離センサ5からの信号に基づいて、自車の実世界における現在位置を測位する。マップマッチング処理部12は、パターンマッチングの手法により自車が走行している道路を推定する。安全制御処理部13は、レーダ7からの検出結果(絶対位置が既知の固定対象物に対する自車の距離)を利用して、推定道路上における自車の存在位置の再度の判断を行って現在位置を特定すると共に、判断された自車の現在位置情報の信頼度を算出し、それら情報をライト制御部9に出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、道路上を移動する車両等の移動体に設けられ、自己の現在位置情報を取得するための移動体用位置情報取得装置に関する。
【背景技術】
【0002】
この種の移動体用位置情報取得装置として、自動車等の車両に搭載されるカーナビゲーションシステムがある。このカーナビゲーションシステムは、GPS衛星からの電波をGPS受信機により受信することに基づいて、自車の絶対位置を測位すると共に、車速センサやジャイロセンサの検出に基づいてその位置を補正することにより、自車の絶対位置(及び進行方向)を高精度で測位するようになっている。そして、表示装置の画面に、自車の位置及び進行方向を地図と重ね合わせて表示するロケーション機能や、ユーザの指定した目的地までの推奨する経路を探索し、案内するルートガイダンス機能等を実現するようになっている。
【0003】
この場合、一般に、ロケーション機能を実現するにあたっては、自車の位置を、表示される電子地図上の道路に乗せるために、自車の移動軌跡と道路地図データ中の道路形状とを比較照合して、現在走行中の道路を推測するマップマッチングが行われる。このようなマップマッチングの方法として、従来から、様々な手法が提案されている(例えば、特許文献1、特許文献2参照)。
【特許文献1】特開平9−304093号公報
【特許文献2】特開2005−207821号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、上記したカーナビゲーションシステムにおいて、道路地図データに基づいて表示装置の画面上に描画される電子地図の精度は、実際の道路に比べてかなり劣るものとなっている。従来のカーナビゲーションシステムは、精度の高い自車の位置情報から、精度に劣る電子地図の道路形状に沿うように自車の相対位置を決定し、表示することを重視するものとなっていた。つまり、従来のマップマッチング手法では、自車が走行している道路を判定することが重要で、その道路上の前後方向の位置情報精度はあまり重視されていなかったのである。
【0005】
これに対し、近年では、カーナビゲーションシステムと車両制御とを連携させることが考えられてきている。具体例をあげると、カーナビゲーションシステムからのカーブ情報に基いて、自車がカーブに差し掛かった際に、車両のヘッドライトの向きを、カーブの先方を向くように自動で制御するといったことが考えられている。しかし、上記のように、自車の道路上の前後方向の位置情報精度が低く、誤差もどの程度か判らないため、車両制御に適用することは信頼性の面から難しいものとなっている。これは、車両制御が安全運転の方向に進めば進むほど問題となる。
【0006】
本発明は上記事情に鑑みてなされたもので、その目的は、自己の現在位置情報を高い精度で得ることができ、ひいては、例えば車両制御等に適用する際の信頼性を高めることができる移動体用位置情報取得装置を提供するにある。
【課題を解決するための手段】
【0007】
本発明の移動体用位置情報取得装置は、道路地図データを記憶する記憶手段と、自己の現在位置を測位する測位手段と、この測位手段による測位結果及び前記道路地図データに基づいて、自己の移動している道路を推定する推定手段と、この推定手段により推定された道路上における自己の存在位置を再度判断して現在位置を特定する位置特定手段と、この位置特定手段により判断された現在位置情報の信頼度を算出する信頼度算出手段と、前記位置特定手段により判断された現在位置情報を、前記信頼度算出手段により算出された信頼度情報と共に出力する出力手段とを具備するところに特徴を有する(請求項1の発明)。
【0008】
本発明においては、移動体の自己の位置の検出(特定)が、測位手段による自己の現在位置の測位、推定手段による自己の移動している道路の推定、位置特定手段による推定道路上における自己の存在位置の再度の判断、の3段階を経て行われるようになる。このとき、位置特定手段を設けたことによって、単に自己が移動している道路を判定するに止まらず、再度の判断によりその道路上での自己の位置がより緻密に特定されることになり、その分、現在位置情報の精度を高めることができる。これと共に、信頼度算出手段により、その現在位置情報の信頼度が算出され、出力手段から出力される情報には、前記現在位置情報に、その信頼度情報が付加されるようになる。従って、その信頼度情報が、現在位置情報をどのように利用するか(あるいは利用の可否)の判断の目安となり、ひいては、例えば車両制御等に適用する際の信頼性を高めることができる。
【0009】
より具体的には、前記位置特定手段を、投影法によるマップマッチングを行うことに基づいて、自己の存在位置を特定するように構成することができる(請求項2の発明)。これにより、道路上の自己の存在位置の再度の判断を簡単な処理により行うことができる。或いは、前記位置特定手段を、検出手段により絶対位置が既知とされた外部の固定対象物に対する自己の相対位置を検出することに基づいて、自己の存在位置を特定するように構成することもできる(請求項3の発明)。これによれば、自己の存在位置をより一層高精度に判断することができる。
【0010】
また、前記信頼度算出手段を、前記測位手段における測位精度及び前記位置特定手段により特定された現在位置の修正誤差に基づいて、信頼度を算出するように構成することができる(請求項4の発明)。電子地図上に推定される見かけの自己位置と、特定された精度の高い自己位置との誤差に応じた信頼度を算出することができる。
【0011】
ところで、前記測位手段により測位した時刻と、前記出力手段により出力された情報を利用する時刻との間にずれ(遅延)が生じている、その間に自己の現在位置が変動しまう等の精度の劣化を招くことになる。そこで、前記信頼度情報に前記測位手段による測位時の時刻情報を含むように構成すれば(請求項5の発明)、時刻のずれによる信頼度の劣化を判断することができ、その精度の劣化を補正するといったことも可能となる。
【発明を実施するための最良の形態】
【0012】
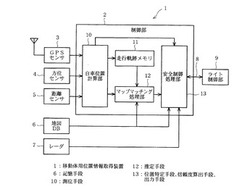
以下、本発明を、カーナビゲーションシステムと車両制御とを連携させた車載装置に適用した一実施例について、図面を参照しながら説明する。図1は、本実施例に係る移動体用位置情報取得装置としての車載装置1の要部構成を概略的に示している。この車載装置1は、移動体としての車両(自動車)に搭載され、制御部2に、GPSセンサ3、方位センサ4、距離センサ5、地図データベース6、レーダ7等を接続して構成されている。そして、本実施例では、前記制御部2には、車内ネットワーク(車内LAN)8を介してライト制御部9が接続されている。
【0013】
そのうち制御部2は、CPU,ROM,RAM,I/O等からなるマイクロコンピュータを主体として構成され、車載装置1全体の制御等を行うようになっている。そして、詳しくは後述するが、そのソフトウエア構成(及びハードウエア構成)により、自車位置計算部10、走行軌跡メモリ11、マップマッチング処理部12、安全制御処理部13としての機能を実現するようになっている。
【0014】
前記GPSセンサ3は、GPS衛星からの信号を受信する受信機を備え、受信信号に基づいて、自己(自車)の現在位置(緯度、経度)や時刻を高精度で検出するようになっている。前記方位センサ4は、自車の進行方向を検出するセンサであり、前記距離センサ5は、自車の走行距離を計測するセンサである。これら位置検出用のセンサ3〜5の信号は、制御部2の自車位置計算部10に入力されるようになっている。
【0015】
前記地図データベース6は、例えば日本全土の道路地図データや、それに付随する施設データ等を記憶するものであり、記憶手段として機能する。前記道路地図データは、地図上の道路を、交差点等をノードとして複数の部分に分割し、各ノード間の部分をリンクとして規定したリンクデータとして与えられる。このリンクデータは、リンク固有のリンクID(識別子)、リンク長、リンクの始点,終点の位置データ、角度(方向)データ、道路幅、道路種別などのデータを含んで構成される。また、道路地図を表示装置の画面上に再生するためのデータも含まれている。
【0016】
前記レーダ7は、例えばマイクロ波の照射及びその反射波の検出に基づいて、自車の前方に位置する対象物(他の走行車両を含む)との間の距離を測定するものである。本実施例では、このレーダ7によって、絶対位置が既知とされた外部の固定対象物(例えば道路上の信号機や特定の建造物に設けられた認識目標)と自車との間の距離(ひいては相対位置)を検出するようになっており、後述するように、検出手段として機能する。このレーダ7の検出信号が、前記制御部2の安全制御処理部13に入力されるようになっている。レーダ7に代えて、監視カメラや、超音波センサ、レーザセンサ等を採用することもできる。
【0017】
尚、図示は省略しているが、この車載装置1(制御部2)には、地図等のナビゲーション画面を表示可能な表示装置、ユーザが各種の操作指示などを行うための操作スイッチ部、音声案内等を行うための音声出力装置、外部(VICS(登録商標)センタ等)との間での通信により道路交通情報等を取得する無線通信部などが接続されている。これにより、表示装置に道路地図と共に自車の現在位置(及び進行方向)を重ね合せて表示させるロケーション機能や、ユーザにより指定された目的地までの推奨する走行経路を自動的に計算しその経路を案内するルートガイダンス機能等の、通常のナビゲーション機能が実現されるようになっている。
【0018】
さて、本実施例においては、車載装置1(制御部2)は、自車の位置情報を取得し、その位置情報等を、前記車内LAN8を介してライト制御部9に出力するようになっている。ライト制御部9は、自車のヘッドライトを自動で制御するものであり、例えば、車外の明暗度の検出に基づいてヘッドライトの点灯、消灯を制御したり、制御部2(安全制御処理部13)から入力された自車の現在位置情報(及び前方道路情報)に応じて、ヘッドライトの向き(照射方向)を調整したりする。
【0019】
そして、後の作用説明でも述べるように、車載装置1(制御部2)が自車の位置情報を得るにあたっては、まず、制御部2の自車位置計算部10は、GPSセンサ3、方位センサ4、距離センサ5からの信号に基づいて、時間t毎の自車の実世界(実際)における現在位置を計算(測位)すると共に、前回からの時間t経過分の走行データを計算する。現在位置の測位結果の情報は、マップマッチング処理部12及び安全制御処理部13に夫々通知される。このとき、各センサ3〜5の誤差に起因する信頼度(測位精度)の情報並びに測位時の時刻情報も併せて通知される。前記走行データは、走行軌跡メモリ11に与えられ、走行軌跡データとして蓄えられる。
【0020】
次に、マップマッチング処理部12は、自車位置計算部10から与えられる現在位置の測位結果、走行軌跡メモリ11に記憶されている走行軌跡データ、地図データベース6から得る道路地図データに基づいて、周知のパターンマッチングの手法により自車が走行している道路(どのリンクを走行しているか)を推定する。推定された自車の走行道路の情報(リンクデータ)は、安全制御処理部13に通知される。
【0021】
安全制御処理部13は、マップマッチング処理部12から与えられる走行道路の情報(リンクデータ)、前記自車位置計算部10から与えられる測位結果の情報、地図データベース6から得る道路地図データ、更には、前記レーダ7からの検出結果(絶対位置が既知の固定対象物に対する自車の相対位置)に基づいて、推定道路上における自車の存在位置の再度の判断を行うようになっている。
【0022】
これと共に、安全制御処理部13は、判断された自車の位置情報の信頼度を算出するようになっている。この場合、信頼度は、自車位置計算部10における測位精度の情報、及び、マップマッチング処理部12において推定された自車の位置と上記判断結果との修正誤差に基づいて算出される。また、この信頼度情報には、自車位置計算部10における測位時の時刻情報も含まれるようになっている。
【0023】
安全制御処理部13は、判断された自車の位置情報を、信頼度情報と共にライト制御部9に出力する。従って、位置検出用の各センサ3〜5及び自車位置計算部10が測位手段として機能する。また、マップマッチング処理部12が推定手段として機能する。そして、安全制御処理部13が、位置特定手段、信頼度算出手段、出力手段として機能するのである。
【0024】
尚、安全制御処理部13は、必要に応じて、自車の現在位置の前方道路情報(カーブ開始点、カーブの曲率半径など)を計算し、併せてライト制御部9に出力するようになっている。そして、ライト制御部9は、安全制御処理部13から入力された位置情報(前方道路情報)に応じて、ヘッドライトの向きをカーブの先方を照らすように調整するといった制御を行うのであるが、その際に、信頼度情報に応じて、制御をどの程度行うのかを判断するようになっている。
【0025】
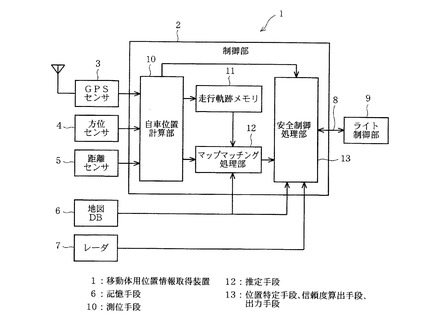
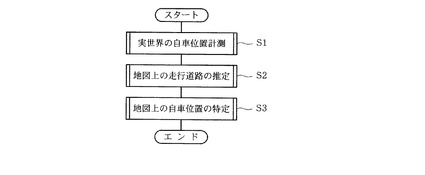
次に、上記構成の作用について、図2ないし図7も参照して説明する。図2のフローチャートは、前記制御部2が実行する自車の現在位置情報の取得の全体の処理手順の概略を示している。また、図3、図4、図5のフローチャートは、図2のステップS1、S2、S3の処理手順の詳細を夫々示している。図6は、その際の全体のデータの流れを示すものである。以下、それらフローチャートについて順に説明する。
【0026】
図2に示すように、自車の現在位置情報を取得するにあたっては、まずステップS1にて、自車位置計算部10による、自車の実世界(実際)における現在位置の計算(測位)が実行される。次のステップS2では、マップマッチング処理部12による、自車が走行している道路の推定が行われる。そして、ステップS3では、安全制御処理部13による、推定道路上における自車の存在位置の再度の判断に基づく現在位置の特定が行われる。また、このステップS3では、現在位置情報の信頼度の算出も行われる。
【0027】
上記ステップS1の詳細な処理手順を示す図3において、ステップS11では、GPSセンサ3、方位センサ4、距離センサ5からの信号の入力が行われる。続くステップS12では、それら各センサ3〜5からの信号を適切なフィルタで補正することが行われる。ステップS13では、補正後のデータから、自車の実世界(実際)における現在位置(絶対位置)の計算(測位)、並びに、自車の走行している絶対方位、前回測位時からの時間t間の走行距離、前回からの相対方位の計算が行われる。
【0028】
計算された現在位置のデータ(例えば、緯度、経度、高度)、絶対方位のデータ(例えば、座標(A,B)から座標(C,D))、走行距離のデータ(例えば、1.6m)、相対方位のデータ(例えば、右前方45度)は、予測誤差(測位精度)及び時刻の情報が付加され、出力される。
【0029】
次に、上記ステップS2の詳細な処理手順を示す図4において、まずステップS21では、自車位置計算部10から得られたデータを利用して初期位置が決定される。そして、ステップS22にて、走行軌跡メモリ11に記憶された走行軌跡のデータ及び地図データベース6から読込まれた道路地図データに基づき、マップマッチング(パターンマッチング)の処理が行われ、自車が電子地図上のどの道路に位置(走行)しているかが推定される。
【0030】
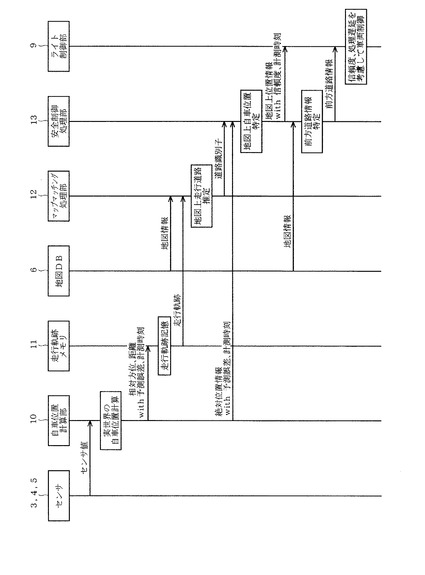
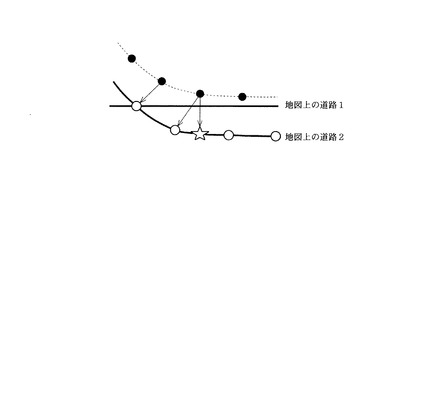
この場合、図7に例示するように、測位された実世界における現在位置のデータが黒丸で示すものであり、電子地図上に道路1と道路2との2つの道路があった場合には、マップマッチングにより道路2上の白丸で示す位置を走行しているものと推定されることになる。地図上の走行道路が推定されると、その道路の識別子(リンクID)のデータが推定時の時刻情報と共に出力される。尚、このとき、推定道路の信頼度(正確さ)は、ほぼ100%に近いと言えるが、可能であれば予測誤差(走行道路の推定の信頼度)のデータを付加するようにしても良い。
【0031】
そして、上記ステップS3の詳細な処理手順を示す図5において、まずステップS31では、上記ステップS1(S13)で測位された現在位置等のデータや、上記ステップS2(S22)で求められた道路識別子等の情報が入力される。そして、ステップS32では、レーダ7の検出(絶対位置が既知とされた信号機に設けられた認識目標と自車との間の距離の検出)に基づいて、自車の存在位置が再度判断され、自車が走行中の道路上における現在位置の特定が行われる。この特定によって、図7に例示するように、自車の位置が、白丸で示す位置から星印で示す位置に修正されるといったことが行われる。
【0032】
次のステップS33では、上記ステップS1にて計算された絶対位置情報に含まれていた予測誤差(測位精度)と、ステップS32において特定された現在位置の修正誤差(位置修正の程度)とに基づいて、特定された自車の地図上の現在位置の信頼度の算出が行われる。この信頼度は、例えば誤差が何mであるといった数値で表したり、%で表したり、あるいは、例えば高、中、低といったランクで表したりすることができる。
【0033】
ステップS34では、ライト制御部9において必要がある場合に、地図上の自車の現在位置の前方の道路情報を、地図データベース6から読み込むことが行われる。ステップS35では、ステップS32で特定された自車の地図上の現在位置情報に、ステップS33で求められた信頼度情報及び時刻情報を付加してライト制御部9に出力することが行われる。このとき、必要に応じて、ステップS34で読み込まれた自車の現在位置の前方の道路情報が併せて出力され、処理が終了する。
【0034】
尚、図6にのみ示すように、ライト制御部9においては、自車の地図上の現在位置情報、信頼度情報、時刻情報、前方道路情報に基づいてヘッドライトの制御を行うことができる。このとき、信頼度に応じて、現在位置情報を制御に利用するかどうか、あるいはどの程度の制御に利用するかを判断することができる。さらには、測位時の時刻情報が含まれることにより、制御を行う際の時刻のずれによる信頼度情報の劣化を判断することができ、その精度の劣化を補正するといったことも可能となる。また、ナビゲーション機能においても、ステップS32において特定された現在位置情報に基づいて、表示装置に対する自車の地図上の現在位置の表示を、より正確に行うことができる。
【0035】
このように本実施例によれば、自車の現在位置の検出(特定)が、自車の現在位置の測位、自車の移動している地図上の道路の推定、推定道路上における自車の存在位置の再度の判断の3段階を経て行われるようにした。これにより、単に自車が移動している道路(リンク)を判定するに止まらず、再度の判断によりその道路上での自車の現在位置がより緻密に特定されることになり、その分、自車の現在位置情報を高い精度で得ることができる。
【0036】
しかも、その現在位置情報の信頼度が算出され、その信頼度情報が現在位置情報に付加されて出力されるようになる。従って、その信頼度情報が、現在位置情報をどのように利用するか(あるいは利用の可否)の判断の目安となり、ひいては、車両制御に適用する際の信頼性を高めることができる。さらに、信頼度情報に、測位時の時刻情報を含ませるようにしたので、時刻のずれによる信頼度の劣化を判断することができ、その精度の劣化を補正するといったことも可能となる。
【0037】
また、特に本実施例では、推定道路上における自車の存在位置の再度の判断を、レーダ7を用いて、絶対位置が既知とされた固定対象物と自車との間の距離を検出することに基づいて行うようにしたので、自車の存在位置をより一層高精度に判断(特定)することができる。
【0038】
尚、上記実施例では、推定道路上における自車の位置の再度の判断(特定)を、検出手段(レーダ7)により絶対位置が既知とされた外部の固定対象物に対する自車の相対位置(距離)を検出することに基づいて行うようにしたが、投影法によるマップマッチングを行うことに基づいて、自車の存在位置を特定するように構成することもできる。これによれば、推定道路上の自車の存在位置の再度の判断を簡単な処理により行うことができ、また、固定対象物に関するインフラ整備が整っていない場所でも実施することができる。複数の手法を組合せて、自車位置の再度の判断(特定)を行うことも可能である。
【0039】
また、上記実施例では、現在位置情報を利用した車両制御として、ヘッドライトの制御を具体例としてあげたが、他にも、自車の現在位置情報をエアコン制御やブレーキ制御などに利用することもできる。その他、例えばカーナビゲーションシステムと車両制御とを連携させた車載装置に限らず、歩行者が所持する歩行者用ナビゲーションシステム等に本発明を適用することも可能であるなど、本発明は上記した実施例に限定されるものではなく、要旨を逸脱しない範囲内で適宜変更して実施し得るものである。
【図面の簡単な説明】
【0040】
【図1】本発明の一実施例を示すもので、全体構成を概略的に示すブロック図
【図2】自車の現在位置情報の取得の全体の処理の概略を示すフローチャート
【図3】自車の現在位置の測位の詳細な処理手順を示すフローチャート
【図4】自車が走行している道路の推定の詳細な処理手順を示すフローチャート
【図5】推定道路上における自車の存在位置の特定の詳細な処理手順を示すフローチャート
【図6】自車の現在位置情報の取得処理におけるデータの流れを示す図
【図7】マップマッチングの例を示す図
【符号の説明】
【0041】
図面中、1は車載装置(移動体用位置情報取得装置)、2は制御部、3はGPSセンサ、4は方位センサ、5は距離センサ、6は地図データベース(記憶手段)、7はレーダ(検出手段)、9はライト制御部、10は自車位置計算部(測位手段)、12はマップマッチング処理部(推定手段)、13は安全制御処理部(位置特定手段、信頼度算出手段、出力手段)を示す。
【技術分野】
【0001】
本発明は、道路上を移動する車両等の移動体に設けられ、自己の現在位置情報を取得するための移動体用位置情報取得装置に関する。
【背景技術】
【0002】
この種の移動体用位置情報取得装置として、自動車等の車両に搭載されるカーナビゲーションシステムがある。このカーナビゲーションシステムは、GPS衛星からの電波をGPS受信機により受信することに基づいて、自車の絶対位置を測位すると共に、車速センサやジャイロセンサの検出に基づいてその位置を補正することにより、自車の絶対位置(及び進行方向)を高精度で測位するようになっている。そして、表示装置の画面に、自車の位置及び進行方向を地図と重ね合わせて表示するロケーション機能や、ユーザの指定した目的地までの推奨する経路を探索し、案内するルートガイダンス機能等を実現するようになっている。
【0003】
この場合、一般に、ロケーション機能を実現するにあたっては、自車の位置を、表示される電子地図上の道路に乗せるために、自車の移動軌跡と道路地図データ中の道路形状とを比較照合して、現在走行中の道路を推測するマップマッチングが行われる。このようなマップマッチングの方法として、従来から、様々な手法が提案されている(例えば、特許文献1、特許文献2参照)。
【特許文献1】特開平9−304093号公報
【特許文献2】特開2005−207821号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、上記したカーナビゲーションシステムにおいて、道路地図データに基づいて表示装置の画面上に描画される電子地図の精度は、実際の道路に比べてかなり劣るものとなっている。従来のカーナビゲーションシステムは、精度の高い自車の位置情報から、精度に劣る電子地図の道路形状に沿うように自車の相対位置を決定し、表示することを重視するものとなっていた。つまり、従来のマップマッチング手法では、自車が走行している道路を判定することが重要で、その道路上の前後方向の位置情報精度はあまり重視されていなかったのである。
【0005】
これに対し、近年では、カーナビゲーションシステムと車両制御とを連携させることが考えられてきている。具体例をあげると、カーナビゲーションシステムからのカーブ情報に基いて、自車がカーブに差し掛かった際に、車両のヘッドライトの向きを、カーブの先方を向くように自動で制御するといったことが考えられている。しかし、上記のように、自車の道路上の前後方向の位置情報精度が低く、誤差もどの程度か判らないため、車両制御に適用することは信頼性の面から難しいものとなっている。これは、車両制御が安全運転の方向に進めば進むほど問題となる。
【0006】
本発明は上記事情に鑑みてなされたもので、その目的は、自己の現在位置情報を高い精度で得ることができ、ひいては、例えば車両制御等に適用する際の信頼性を高めることができる移動体用位置情報取得装置を提供するにある。
【課題を解決するための手段】
【0007】
本発明の移動体用位置情報取得装置は、道路地図データを記憶する記憶手段と、自己の現在位置を測位する測位手段と、この測位手段による測位結果及び前記道路地図データに基づいて、自己の移動している道路を推定する推定手段と、この推定手段により推定された道路上における自己の存在位置を再度判断して現在位置を特定する位置特定手段と、この位置特定手段により判断された現在位置情報の信頼度を算出する信頼度算出手段と、前記位置特定手段により判断された現在位置情報を、前記信頼度算出手段により算出された信頼度情報と共に出力する出力手段とを具備するところに特徴を有する(請求項1の発明)。
【0008】
本発明においては、移動体の自己の位置の検出(特定)が、測位手段による自己の現在位置の測位、推定手段による自己の移動している道路の推定、位置特定手段による推定道路上における自己の存在位置の再度の判断、の3段階を経て行われるようになる。このとき、位置特定手段を設けたことによって、単に自己が移動している道路を判定するに止まらず、再度の判断によりその道路上での自己の位置がより緻密に特定されることになり、その分、現在位置情報の精度を高めることができる。これと共に、信頼度算出手段により、その現在位置情報の信頼度が算出され、出力手段から出力される情報には、前記現在位置情報に、その信頼度情報が付加されるようになる。従って、その信頼度情報が、現在位置情報をどのように利用するか(あるいは利用の可否)の判断の目安となり、ひいては、例えば車両制御等に適用する際の信頼性を高めることができる。
【0009】
より具体的には、前記位置特定手段を、投影法によるマップマッチングを行うことに基づいて、自己の存在位置を特定するように構成することができる(請求項2の発明)。これにより、道路上の自己の存在位置の再度の判断を簡単な処理により行うことができる。或いは、前記位置特定手段を、検出手段により絶対位置が既知とされた外部の固定対象物に対する自己の相対位置を検出することに基づいて、自己の存在位置を特定するように構成することもできる(請求項3の発明)。これによれば、自己の存在位置をより一層高精度に判断することができる。
【0010】
また、前記信頼度算出手段を、前記測位手段における測位精度及び前記位置特定手段により特定された現在位置の修正誤差に基づいて、信頼度を算出するように構成することができる(請求項4の発明)。電子地図上に推定される見かけの自己位置と、特定された精度の高い自己位置との誤差に応じた信頼度を算出することができる。
【0011】
ところで、前記測位手段により測位した時刻と、前記出力手段により出力された情報を利用する時刻との間にずれ(遅延)が生じている、その間に自己の現在位置が変動しまう等の精度の劣化を招くことになる。そこで、前記信頼度情報に前記測位手段による測位時の時刻情報を含むように構成すれば(請求項5の発明)、時刻のずれによる信頼度の劣化を判断することができ、その精度の劣化を補正するといったことも可能となる。
【発明を実施するための最良の形態】
【0012】
以下、本発明を、カーナビゲーションシステムと車両制御とを連携させた車載装置に適用した一実施例について、図面を参照しながら説明する。図1は、本実施例に係る移動体用位置情報取得装置としての車載装置1の要部構成を概略的に示している。この車載装置1は、移動体としての車両(自動車)に搭載され、制御部2に、GPSセンサ3、方位センサ4、距離センサ5、地図データベース6、レーダ7等を接続して構成されている。そして、本実施例では、前記制御部2には、車内ネットワーク(車内LAN)8を介してライト制御部9が接続されている。
【0013】
そのうち制御部2は、CPU,ROM,RAM,I/O等からなるマイクロコンピュータを主体として構成され、車載装置1全体の制御等を行うようになっている。そして、詳しくは後述するが、そのソフトウエア構成(及びハードウエア構成)により、自車位置計算部10、走行軌跡メモリ11、マップマッチング処理部12、安全制御処理部13としての機能を実現するようになっている。
【0014】
前記GPSセンサ3は、GPS衛星からの信号を受信する受信機を備え、受信信号に基づいて、自己(自車)の現在位置(緯度、経度)や時刻を高精度で検出するようになっている。前記方位センサ4は、自車の進行方向を検出するセンサであり、前記距離センサ5は、自車の走行距離を計測するセンサである。これら位置検出用のセンサ3〜5の信号は、制御部2の自車位置計算部10に入力されるようになっている。
【0015】
前記地図データベース6は、例えば日本全土の道路地図データや、それに付随する施設データ等を記憶するものであり、記憶手段として機能する。前記道路地図データは、地図上の道路を、交差点等をノードとして複数の部分に分割し、各ノード間の部分をリンクとして規定したリンクデータとして与えられる。このリンクデータは、リンク固有のリンクID(識別子)、リンク長、リンクの始点,終点の位置データ、角度(方向)データ、道路幅、道路種別などのデータを含んで構成される。また、道路地図を表示装置の画面上に再生するためのデータも含まれている。
【0016】
前記レーダ7は、例えばマイクロ波の照射及びその反射波の検出に基づいて、自車の前方に位置する対象物(他の走行車両を含む)との間の距離を測定するものである。本実施例では、このレーダ7によって、絶対位置が既知とされた外部の固定対象物(例えば道路上の信号機や特定の建造物に設けられた認識目標)と自車との間の距離(ひいては相対位置)を検出するようになっており、後述するように、検出手段として機能する。このレーダ7の検出信号が、前記制御部2の安全制御処理部13に入力されるようになっている。レーダ7に代えて、監視カメラや、超音波センサ、レーザセンサ等を採用することもできる。
【0017】
尚、図示は省略しているが、この車載装置1(制御部2)には、地図等のナビゲーション画面を表示可能な表示装置、ユーザが各種の操作指示などを行うための操作スイッチ部、音声案内等を行うための音声出力装置、外部(VICS(登録商標)センタ等)との間での通信により道路交通情報等を取得する無線通信部などが接続されている。これにより、表示装置に道路地図と共に自車の現在位置(及び進行方向)を重ね合せて表示させるロケーション機能や、ユーザにより指定された目的地までの推奨する走行経路を自動的に計算しその経路を案内するルートガイダンス機能等の、通常のナビゲーション機能が実現されるようになっている。
【0018】
さて、本実施例においては、車載装置1(制御部2)は、自車の位置情報を取得し、その位置情報等を、前記車内LAN8を介してライト制御部9に出力するようになっている。ライト制御部9は、自車のヘッドライトを自動で制御するものであり、例えば、車外の明暗度の検出に基づいてヘッドライトの点灯、消灯を制御したり、制御部2(安全制御処理部13)から入力された自車の現在位置情報(及び前方道路情報)に応じて、ヘッドライトの向き(照射方向)を調整したりする。
【0019】
そして、後の作用説明でも述べるように、車載装置1(制御部2)が自車の位置情報を得るにあたっては、まず、制御部2の自車位置計算部10は、GPSセンサ3、方位センサ4、距離センサ5からの信号に基づいて、時間t毎の自車の実世界(実際)における現在位置を計算(測位)すると共に、前回からの時間t経過分の走行データを計算する。現在位置の測位結果の情報は、マップマッチング処理部12及び安全制御処理部13に夫々通知される。このとき、各センサ3〜5の誤差に起因する信頼度(測位精度)の情報並びに測位時の時刻情報も併せて通知される。前記走行データは、走行軌跡メモリ11に与えられ、走行軌跡データとして蓄えられる。
【0020】
次に、マップマッチング処理部12は、自車位置計算部10から与えられる現在位置の測位結果、走行軌跡メモリ11に記憶されている走行軌跡データ、地図データベース6から得る道路地図データに基づいて、周知のパターンマッチングの手法により自車が走行している道路(どのリンクを走行しているか)を推定する。推定された自車の走行道路の情報(リンクデータ)は、安全制御処理部13に通知される。
【0021】
安全制御処理部13は、マップマッチング処理部12から与えられる走行道路の情報(リンクデータ)、前記自車位置計算部10から与えられる測位結果の情報、地図データベース6から得る道路地図データ、更には、前記レーダ7からの検出結果(絶対位置が既知の固定対象物に対する自車の相対位置)に基づいて、推定道路上における自車の存在位置の再度の判断を行うようになっている。
【0022】
これと共に、安全制御処理部13は、判断された自車の位置情報の信頼度を算出するようになっている。この場合、信頼度は、自車位置計算部10における測位精度の情報、及び、マップマッチング処理部12において推定された自車の位置と上記判断結果との修正誤差に基づいて算出される。また、この信頼度情報には、自車位置計算部10における測位時の時刻情報も含まれるようになっている。
【0023】
安全制御処理部13は、判断された自車の位置情報を、信頼度情報と共にライト制御部9に出力する。従って、位置検出用の各センサ3〜5及び自車位置計算部10が測位手段として機能する。また、マップマッチング処理部12が推定手段として機能する。そして、安全制御処理部13が、位置特定手段、信頼度算出手段、出力手段として機能するのである。
【0024】
尚、安全制御処理部13は、必要に応じて、自車の現在位置の前方道路情報(カーブ開始点、カーブの曲率半径など)を計算し、併せてライト制御部9に出力するようになっている。そして、ライト制御部9は、安全制御処理部13から入力された位置情報(前方道路情報)に応じて、ヘッドライトの向きをカーブの先方を照らすように調整するといった制御を行うのであるが、その際に、信頼度情報に応じて、制御をどの程度行うのかを判断するようになっている。
【0025】
次に、上記構成の作用について、図2ないし図7も参照して説明する。図2のフローチャートは、前記制御部2が実行する自車の現在位置情報の取得の全体の処理手順の概略を示している。また、図3、図4、図5のフローチャートは、図2のステップS1、S2、S3の処理手順の詳細を夫々示している。図6は、その際の全体のデータの流れを示すものである。以下、それらフローチャートについて順に説明する。
【0026】
図2に示すように、自車の現在位置情報を取得するにあたっては、まずステップS1にて、自車位置計算部10による、自車の実世界(実際)における現在位置の計算(測位)が実行される。次のステップS2では、マップマッチング処理部12による、自車が走行している道路の推定が行われる。そして、ステップS3では、安全制御処理部13による、推定道路上における自車の存在位置の再度の判断に基づく現在位置の特定が行われる。また、このステップS3では、現在位置情報の信頼度の算出も行われる。
【0027】
上記ステップS1の詳細な処理手順を示す図3において、ステップS11では、GPSセンサ3、方位センサ4、距離センサ5からの信号の入力が行われる。続くステップS12では、それら各センサ3〜5からの信号を適切なフィルタで補正することが行われる。ステップS13では、補正後のデータから、自車の実世界(実際)における現在位置(絶対位置)の計算(測位)、並びに、自車の走行している絶対方位、前回測位時からの時間t間の走行距離、前回からの相対方位の計算が行われる。
【0028】
計算された現在位置のデータ(例えば、緯度、経度、高度)、絶対方位のデータ(例えば、座標(A,B)から座標(C,D))、走行距離のデータ(例えば、1.6m)、相対方位のデータ(例えば、右前方45度)は、予測誤差(測位精度)及び時刻の情報が付加され、出力される。
【0029】
次に、上記ステップS2の詳細な処理手順を示す図4において、まずステップS21では、自車位置計算部10から得られたデータを利用して初期位置が決定される。そして、ステップS22にて、走行軌跡メモリ11に記憶された走行軌跡のデータ及び地図データベース6から読込まれた道路地図データに基づき、マップマッチング(パターンマッチング)の処理が行われ、自車が電子地図上のどの道路に位置(走行)しているかが推定される。
【0030】
この場合、図7に例示するように、測位された実世界における現在位置のデータが黒丸で示すものであり、電子地図上に道路1と道路2との2つの道路があった場合には、マップマッチングにより道路2上の白丸で示す位置を走行しているものと推定されることになる。地図上の走行道路が推定されると、その道路の識別子(リンクID)のデータが推定時の時刻情報と共に出力される。尚、このとき、推定道路の信頼度(正確さ)は、ほぼ100%に近いと言えるが、可能であれば予測誤差(走行道路の推定の信頼度)のデータを付加するようにしても良い。
【0031】
そして、上記ステップS3の詳細な処理手順を示す図5において、まずステップS31では、上記ステップS1(S13)で測位された現在位置等のデータや、上記ステップS2(S22)で求められた道路識別子等の情報が入力される。そして、ステップS32では、レーダ7の検出(絶対位置が既知とされた信号機に設けられた認識目標と自車との間の距離の検出)に基づいて、自車の存在位置が再度判断され、自車が走行中の道路上における現在位置の特定が行われる。この特定によって、図7に例示するように、自車の位置が、白丸で示す位置から星印で示す位置に修正されるといったことが行われる。
【0032】
次のステップS33では、上記ステップS1にて計算された絶対位置情報に含まれていた予測誤差(測位精度)と、ステップS32において特定された現在位置の修正誤差(位置修正の程度)とに基づいて、特定された自車の地図上の現在位置の信頼度の算出が行われる。この信頼度は、例えば誤差が何mであるといった数値で表したり、%で表したり、あるいは、例えば高、中、低といったランクで表したりすることができる。
【0033】
ステップS34では、ライト制御部9において必要がある場合に、地図上の自車の現在位置の前方の道路情報を、地図データベース6から読み込むことが行われる。ステップS35では、ステップS32で特定された自車の地図上の現在位置情報に、ステップS33で求められた信頼度情報及び時刻情報を付加してライト制御部9に出力することが行われる。このとき、必要に応じて、ステップS34で読み込まれた自車の現在位置の前方の道路情報が併せて出力され、処理が終了する。
【0034】
尚、図6にのみ示すように、ライト制御部9においては、自車の地図上の現在位置情報、信頼度情報、時刻情報、前方道路情報に基づいてヘッドライトの制御を行うことができる。このとき、信頼度に応じて、現在位置情報を制御に利用するかどうか、あるいはどの程度の制御に利用するかを判断することができる。さらには、測位時の時刻情報が含まれることにより、制御を行う際の時刻のずれによる信頼度情報の劣化を判断することができ、その精度の劣化を補正するといったことも可能となる。また、ナビゲーション機能においても、ステップS32において特定された現在位置情報に基づいて、表示装置に対する自車の地図上の現在位置の表示を、より正確に行うことができる。
【0035】
このように本実施例によれば、自車の現在位置の検出(特定)が、自車の現在位置の測位、自車の移動している地図上の道路の推定、推定道路上における自車の存在位置の再度の判断の3段階を経て行われるようにした。これにより、単に自車が移動している道路(リンク)を判定するに止まらず、再度の判断によりその道路上での自車の現在位置がより緻密に特定されることになり、その分、自車の現在位置情報を高い精度で得ることができる。
【0036】
しかも、その現在位置情報の信頼度が算出され、その信頼度情報が現在位置情報に付加されて出力されるようになる。従って、その信頼度情報が、現在位置情報をどのように利用するか(あるいは利用の可否)の判断の目安となり、ひいては、車両制御に適用する際の信頼性を高めることができる。さらに、信頼度情報に、測位時の時刻情報を含ませるようにしたので、時刻のずれによる信頼度の劣化を判断することができ、その精度の劣化を補正するといったことも可能となる。
【0037】
また、特に本実施例では、推定道路上における自車の存在位置の再度の判断を、レーダ7を用いて、絶対位置が既知とされた固定対象物と自車との間の距離を検出することに基づいて行うようにしたので、自車の存在位置をより一層高精度に判断(特定)することができる。
【0038】
尚、上記実施例では、推定道路上における自車の位置の再度の判断(特定)を、検出手段(レーダ7)により絶対位置が既知とされた外部の固定対象物に対する自車の相対位置(距離)を検出することに基づいて行うようにしたが、投影法によるマップマッチングを行うことに基づいて、自車の存在位置を特定するように構成することもできる。これによれば、推定道路上の自車の存在位置の再度の判断を簡単な処理により行うことができ、また、固定対象物に関するインフラ整備が整っていない場所でも実施することができる。複数の手法を組合せて、自車位置の再度の判断(特定)を行うことも可能である。
【0039】
また、上記実施例では、現在位置情報を利用した車両制御として、ヘッドライトの制御を具体例としてあげたが、他にも、自車の現在位置情報をエアコン制御やブレーキ制御などに利用することもできる。その他、例えばカーナビゲーションシステムと車両制御とを連携させた車載装置に限らず、歩行者が所持する歩行者用ナビゲーションシステム等に本発明を適用することも可能であるなど、本発明は上記した実施例に限定されるものではなく、要旨を逸脱しない範囲内で適宜変更して実施し得るものである。
【図面の簡単な説明】
【0040】
【図1】本発明の一実施例を示すもので、全体構成を概略的に示すブロック図
【図2】自車の現在位置情報の取得の全体の処理の概略を示すフローチャート
【図3】自車の現在位置の測位の詳細な処理手順を示すフローチャート
【図4】自車が走行している道路の推定の詳細な処理手順を示すフローチャート
【図5】推定道路上における自車の存在位置の特定の詳細な処理手順を示すフローチャート
【図6】自車の現在位置情報の取得処理におけるデータの流れを示す図
【図7】マップマッチングの例を示す図
【符号の説明】
【0041】
図面中、1は車載装置(移動体用位置情報取得装置)、2は制御部、3はGPSセンサ、4は方位センサ、5は距離センサ、6は地図データベース(記憶手段)、7はレーダ(検出手段)、9はライト制御部、10は自車位置計算部(測位手段)、12はマップマッチング処理部(推定手段)、13は安全制御処理部(位置特定手段、信頼度算出手段、出力手段)を示す。
【特許請求の範囲】
【請求項1】
道路上を移動する移動体に設けられ、自己の現在位置情報を取得するための装置であって、
道路地図データを記憶する記憶手段と、
自己の現在位置を測位する測位手段と、
この測位手段による測位結果及び前記道路地図データに基づいて、自己の移動している道路を推定する推定手段と、
この推定手段により推定された道路上における自己の存在位置を再度判断して現在位置を特定する位置特定手段と、
この位置特定手段により判断された自己の現在位置情報の信頼度を算出する信頼度算出手段と、
前記位置特定手段により判断された現在位置情報を、前記信頼度算出手段により算出された信頼度情報と共に出力する出力手段とを具備することを特徴とする移動体用位置情報取得装置。
【請求項2】
前記位置特定手段は、投影法によるマップマッチングを行うことに基づいて、自己の存在位置を特定することを特徴とする請求項1記載の移動体用位置情報取得装置。
【請求項3】
前記位置特定手段は、絶対位置が既知とされた外部の固定対象物に対する自己の相対位置を、検出手段により検出することに基づいて、自己の存在位置を特定することを特徴とする請求項1記載の移動体用位置情報取得装置。
【請求項4】
前記信頼度算出手段は、前記測位手段における測位精度及び前記位置特定手段により特定された現在位置の修正誤差に基づいて、信頼度を算出することを特徴とする請求項1ないし3のいずれかに記載の移動体用位置情報取得装置。
【請求項5】
前記信頼度情報は、前記測位手段による測位時の時刻情報を含むことを特徴とする請求項1ないし4のいずれかに記載の移動体用位置情報取得装置。
【請求項1】
道路上を移動する移動体に設けられ、自己の現在位置情報を取得するための装置であって、
道路地図データを記憶する記憶手段と、
自己の現在位置を測位する測位手段と、
この測位手段による測位結果及び前記道路地図データに基づいて、自己の移動している道路を推定する推定手段と、
この推定手段により推定された道路上における自己の存在位置を再度判断して現在位置を特定する位置特定手段と、
この位置特定手段により判断された自己の現在位置情報の信頼度を算出する信頼度算出手段と、
前記位置特定手段により判断された現在位置情報を、前記信頼度算出手段により算出された信頼度情報と共に出力する出力手段とを具備することを特徴とする移動体用位置情報取得装置。
【請求項2】
前記位置特定手段は、投影法によるマップマッチングを行うことに基づいて、自己の存在位置を特定することを特徴とする請求項1記載の移動体用位置情報取得装置。
【請求項3】
前記位置特定手段は、絶対位置が既知とされた外部の固定対象物に対する自己の相対位置を、検出手段により検出することに基づいて、自己の存在位置を特定することを特徴とする請求項1記載の移動体用位置情報取得装置。
【請求項4】
前記信頼度算出手段は、前記測位手段における測位精度及び前記位置特定手段により特定された現在位置の修正誤差に基づいて、信頼度を算出することを特徴とする請求項1ないし3のいずれかに記載の移動体用位置情報取得装置。
【請求項5】
前記信頼度情報は、前記測位手段による測位時の時刻情報を含むことを特徴とする請求項1ないし4のいずれかに記載の移動体用位置情報取得装置。
【図1】


【図2】
【図3】

【図4】

【図5】

【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2007−218848(P2007−218848A)
【公開日】平成19年8月30日(2007.8.30)
【国際特許分類】
【出願番号】特願2006−42427(P2006−42427)
【出願日】平成18年2月20日(2006.2.20)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成19年8月30日(2007.8.30)
【国際特許分類】
【出願日】平成18年2月20日(2006.2.20)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]