
Fターム[2F062GG71]の内容
機械的手段の使用による測定装置 (14,257) | 測定機器 (1,459) | 光学的な検出器 (210)
Fターム[2F062GG71]の下位に属するFターム
Fターム[2F062GG71]に分類される特許
21 - 40 / 134
モアレ縞を使った変位計測方法
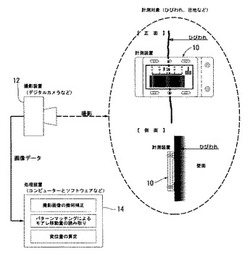
【課題】コンクリート構造物、鋼構造物、土構造物、または岩盤、地盤に発生したひびわれ、亀裂、目地などを対象とし、離れた地点から画像撮影することで高い精度を確保し、安全、簡単かつ迅速な計測を可能とするモアレ縞を利用した変位計測方法を提供する。
【解決手段】モアレ縞を利用して2地点間の微小な相対変位を計測するモアレ縞を使った変位計測方法であって、計測対象に沿うように設置され相互に重ねられた2枚の板状の部品からなる計測装置10の2枚の板状の部品のそれぞれに、空間的に周期構造をもつ格子を表示し、格子同士の光学的な干渉により生じるモアレ縞の移動量を読み取ることで計測対象の変位を計測する。
(もっと読む)
厚さ連続測定器、厚さ連続測定装置及び厚さ連続測定方法

【課題】 厚さ1mm以下の長尺シートの厚さを連続的に測定する。
【解決手段】 装置基体10と、上下方向に揺動自在に前記基体10に取付けられた回転自在の上部球26と、上部球26の上方に取付けられ前記上部球26の上下揺動に連動して上下揺動するレーザー光反射体16と、前記レーザー光反射体16の上方において装置基体10に固定されたレーザー厚さ測定器14とからなる上部球支持装置6と、前記上部球支持装置6の上部球26と対向して上部球26の下方に回転自在に下部球32を配設してなる下部球支持装置8とからなる連続走行シートの厚さ連続測定器。
(もっと読む)
スタイラス観察装置
【課題】簡素な構成でスタイラスの姿勢を容易、かつ適切に調整することができるスタイラス観察装置の提供。
【解決手段】スタイラス観察装置2は、スタイラス11の軸に直交する平面内で光軸を互いに直交させるように配設され、スタイラス11からの光を反射させる2つのミラー21,22と、各ミラー21,22にて反射される光を合成するハーフミラー23と、ハーフミラー23にて合成される光を撮像する撮像手段25とを備える。スタイラス11からの光は、2つのミラー21,22にて反射され、ハーフミラー23にて合成される。そして、ハーフミラー23にて合成される光は、撮像手段25にて撮像されるので、スタイラス11を互いに直交する2つの方向から同時に撮像することができる。
(もっと読む)
UO鋼管溶接部ビード位置検出装置
【課題】UO鋼管の溶接部ビード位置を、安価で、精度よく検出することが可能なUO鋼管溶接部ビード位置検出装置を提供する。
【解決手段】UO鋼管1の軸線直下に配置されたタッチローラ6を当該UO鋼管1の外周面に当接した状態で、ターニングロール3によってUO鋼管1を周方向に回転させると、UO鋼管1の溶接部ビード2がタッチローラ6を乗り越える前後で2個1対のレーザ式変位計9の出力が変動するため、それらのレーザ式変位計9の出力変動から溶接部ビード2の入側と出側の位置を求め、その中間を溶接部ビード2の位置として算出することができる。また、2個1対のレーザ式変位計9の出力の微分値の絶対値が所定値以上になる位置を溶接部ビード2の入側又は出側の位置とすることで、検出精度を向上することができる。
(もっと読む)
照明付きプローブ端を有する座標測定機および動作方法
可搬型の関節アーム座標測定機(AACMM)が、提供される。AACMM(100)は、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム(104)を含む。アーム(104)は、複数の接続されたアームセグメント(106、108)を含み、アームセグメント(106、108)のそれぞれは、位置信号を生成するための少なくとも1つの位置トランスデューサを含む。測定デバイス(118)が、AACMM(100)の第1の端部に装着される。トランスデューサからの位置信号を受信するための、および測定デバイス(118)の位置に対応するデータを提供するための電子回路(210)が、設けられる。光源(402)が、アーム(104)に結合され、測定デバイス(118)の近くに光を放射するように配置される。 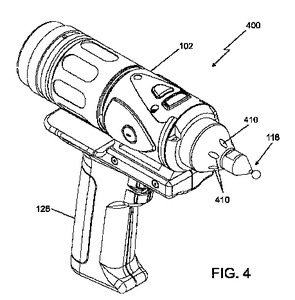 (もっと読む)
(もっと読む)
多機能座標測定機
可搬型の関節アーム座標測定機(AACMM)が、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能なアーム部であって、接続されたアームセグメントを含み、各アームセグメントが、位置信号を生成するための少なくとも1つの位置トランスデューサを含む、アーム部と、AACMMの第1の端部に装着された測定デバイスと、トランスデューサからの位置信号を受信し、測定デバイスの位置に対応するデータを提供する電子回路とを含む。可搬型のAACMMを実装することが、データが送信される送信経路を判定することによって、データが受信される送信元デバイスを特定するステップであって、送信元デバイスが、AACMMの第1の端部に取外し可能なように装着される、ステップと、送信元デバイスの特定情報に基づいてデータのデータタイプを判定するステップと、データタイプに応じてデータに対してアクションを実行するステップと、アクションを実行した結果を送信先デバイスに出力するステップとを含む。 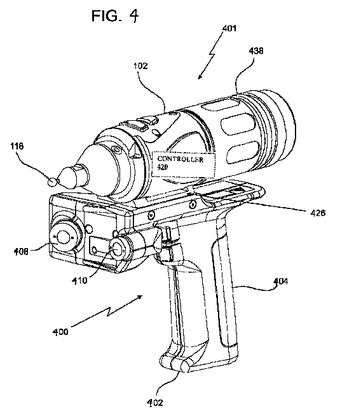 (もっと読む)
(もっと読む)
可搬型の関節アーム座標測定機および統合された電子データ処理システム
可搬型の関節アーム座標測定機の実装が、機能を実行する第1の要求を受信するステップを含む。可搬型のAACMMは、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含み、各アームセグメントが位置信号を生成するための少なくとも1つの位置トランスデューサを含む、関節アーム部と、AACMMの第1の端部に装着された測定デバイスと、トランスデューサからの位置信号を受信し、測定デバイスの位置に対応するデータを提供する電子回路とを含む。可搬型の関節アーム座標測定機の実装は、第1の要求が受信される送信元デバイスを特定するステップと、第1の要求に従って機能を実施するステップと、第1のポートおよび第2のポートのうちのどちらから第1の要求が受信されるかを特定することによって、送信先デバイスを第1の要求の送信元デバイスとして選択するステップと、機能を実施することにより得られた情報を送信先デバイスに送信するステップとをさらに含む。 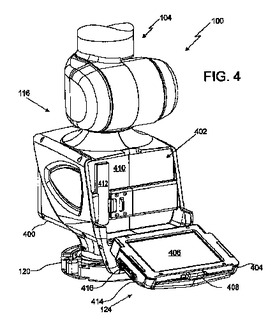 (もっと読む)
(もっと読む)
プレス金型の動的変形測定方法および装置
【課題】プレス金型にセンサを取り付けることなく、プレス成形時におけるプレス金型の動的変形を高精度で測定し得るようにする。
【解決手段】プレス金型の動的変形測定装置は、下金型13および上金型14を備えたプレス金型11と、ボルスタ16およびスライダ17を備えたプレス機本体10との間に着脱自在に配置される測定治具本体33を有し、プレス成形時におけるプレス金型11の動的変形を測定する。測定治具本体33に両端部が滑り支持された水平棒材41には、プレス金型11の弾性変形量を検出するための渦電流変位センサが設けられている。測定治具本体33に設けられた荷重受け駒36には、プレス金型11の圧力分布を検出するための歪みゲージが設けられている。
(もっと読む)
座標測定機用ディスプレイ
基部を有する可搬型の関節アーム座標測定機が、提供される。カバーが、閉じた位置と開いた位置の間を動くように基部に回転可能なように結合される。ディスプレイが、カバー内に配置される。ディスプレイは、筐体の片側に配置された、タッチスクリーン面などのスクリーン面を含む。スクリーン面は、閉じた位置において基部に近接し、開いた位置において基部に対して斜めに配置される。 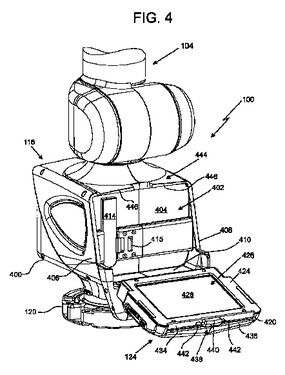 (もっと読む)
(もっと読む)
マルチバスアーム技術を用いた可搬型の関節アーム座標測定機
手動で位置付けることが可能な関節アーム部と、測定デバイスと、電子回路とを含む、マルチバスアーム技術を用いた可搬型の関節アーム座標測定機(AACMM)。電子回路は、アーム部からの位置信号を受信し、測定デバイスの位置に対応するデータを提供するように構成される。AACMMは、プローブ端と、アクセサリデバイスと、エンコーダデータバスと、第1のデバイスデータバスとをさらに含む。エンコーダデータバスは、アーム部および電子回路に結合され、エンコーダデータバスは、電子回路に位置信号を送信するように構成される。第1のデバイスデータバスは、アクセサリデバイスおよび電子回路に結合される。第1のデバイスデータバスは、アクセサリデバイスから電子回路にアクセサリデバイスデータを送信するために、エンコーダデータバスと同時に、エンコーダデータバスとは独立して動作するように構成される。 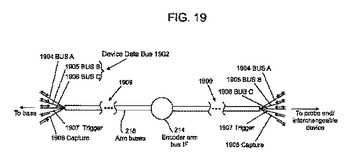 (もっと読む)
(もっと読む)
傾斜計を用いて関節アーム座標測定機の取り付けの安定性を評価するための方法
可搬型の関節アーム座標測定機が、基部と、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含む、アーム部と、トランスデューサからの位置信号を受信する電子回路と、基部に結合された第1の傾斜計であって、基部の傾斜の角度に応じた第1の電気信号を生成するように構成された、第1の傾斜計と、第1の傾斜計の第1の読み取り値および第1の傾斜計の第2の読み取り値を記録するように構成された電気的システムであって、第1の読み取り値が、基部に加えられた第1の力および取り付け構造に加えられた第3の力のうちの少なくとも1つに応じたものであり、第2の読み取り値が、基部に加えられた第2の力および取り付け構造に加えられた第4の力のうちの少なくとも1つに応じたものである、電気的システムとを含む。 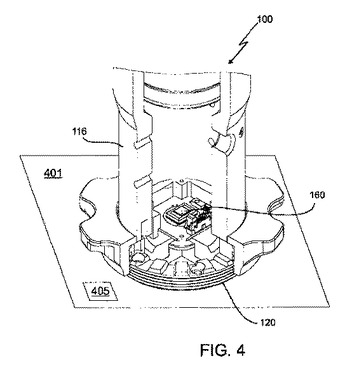 (もっと読む)
(もっと読む)
取り外し可能なアクセサリを有する座標測定機
可搬型の関節アーム座標測定機(100)が、提供される。座標測定機(100)は、アーム部(104)とともに基部(116)を含む。プローブ端(401)が、基部(116)から遠位にある、アーム部(104)の端部に結合される。プローブ端(401)は、締め具(438)および第1のコネクタ(428)を有する。デバイス(400)が、締め具(438)によってプローブ端(401)に取り外し可能なように結合され、デバイス(400)は、締め具(438)がデバイス(400)をプローブ端(401)に結合するときに第1のコネクタ(428)に係合するように構成された第2のコネクタ(429)を有する。 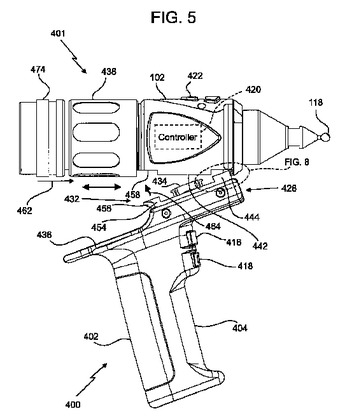 (もっと読む)
(もっと読む)
シリンダを測定するための方法及び装置
作動シリンダの幾何学的形状を、特にその研磨操作中に、明らかにするための機器は、固定中間構造体(15)に関して互いに遠ざかる方向及び近づく方向に動くことができる一対の可動クランプ(13、14)を備え、クランプ(13、14)は、該クランプ間と固定中間構造体(15)の表面(21)との間に位置決めされた被測定シリンダ(11)に対して燕尾形配置に従う、互いに対向する向きの傾斜面(19、20)を有し、可動クランプ(13、14)の表面(19、20)及び固定中間構造体(15)の表面(21)は、シリンダ(11)が静止していても回転していても、常にシリンダ(11)との接触を保ち、固定構造体(15)はまた、その内部に、クランプ(13、14)の動きを相関させるための、互いに相互作用する部材のグループ(32、33;29、43;28、35、36、37、38)有する。 (もっと読む)
リニアゲージ
【課題】位置ずれによる測定精度の劣化を抑制する。
【解決手段】測定子3が被計測物に当接された状態で、シャフト2がフレーム1に対して前後に移動すると、シャフト2にホルダ4を介して固定された第1スリット5が前後に移動する(a1-a3)。シャフト2、ホルダ4、第1スリット5の移動範囲は、前方向については、ホルダ4の前方端部とフレーム1の当接により制限され(a1)、後方向については、ホルダ4の後方端部とストッパ8との当接により制限される(a3)。ストッパ8は、くの字状に折れ曲がった部材であり、ホルダ4の後方端部との当接面より前方に距離dオフセットした位置においてフレーム1にネジ81によってネジ止め固定されている(a1)。
(もっと読む)
測定オブジェクトの形状を触覚光学式に決定するための方法および装置
本発明は、座標測定装置内のワークピースの構造および/または形状を、触覚光学式の測定法によって決定するための方法であって、少なくとも1つの方向における接触型プローブ要素の位置を、光学的に横方向に測定する方法で、第1のセンサによって決定し、かつ、少なくとも1つの第2の方向における接触型プローブ要素の位置を、少なくとも1つの距離センサによって決定する方法に関する。複数のセンサによる接触型プローブ要素の誤りのない検出を可能にするために、接触型プローブ要素を保持手段に取り付けるために、第1のセンサの光路によってビーム方向に貫通される少なくとも1つの柔軟な接続要素を使用し、該接続要素は透明であり、および/または第1のセンサに対し大幅に焦点を外して設けられることが提案される。 (もっと読む)
スタイラス及び接触式変位センサ
【課題】被検物の表面付近まで安全に接近させることができるスタイラスを提供する。
【解決手段】先端部12を被検物Sに接触させて被検物Sの表面を追従させることにより、被検物Sの表面形状を測定するためのスタイラス10は、先端部12の先端12Aよりも前方の所定位置Pを通るように光Lを照射する発光部13と、発光部13から照射された光Lが反射された反射光L1を検知する受光部14とを備えることを特徴とする。
(もっと読む)
重心測定システムおよび重心測定方法
【課題】被測定物の重心位置を正確に把握することができる重心測定システムおよび重心測定方法を提供する。
【解決手段】被測定物を載置する載置台、プローブ12およびこれらを三次元方向へ相対移動させる相対移動機構13を有し、被測定物の形状を測定する三次元測定機10と、載置台の重心位置を測定する重心測定装置20と、三次元測定機の座標系と重心測定装置の座標系とを一致させるとともに、三次元測定機によって測定された被測定物の形状データに、重心測定装置で測定された重心位置を合成するデータ処理装置30とを備える。
(もっと読む)
改良された関節式アーム
関節式アームCMMは、複数の伝達部材と、少なくとも2つの伝達部材を互いに接続する複数の関節部材と、遠端における座標取得部材と、近端におけるベースとを備える。関節部材の少なくとも2つは、少なくとも1つのエンコーダを備えることが可能であり、少なくとも2つのエンコーダは、ともに、単一のモノブロックハウジング内に収容されることが可能である。 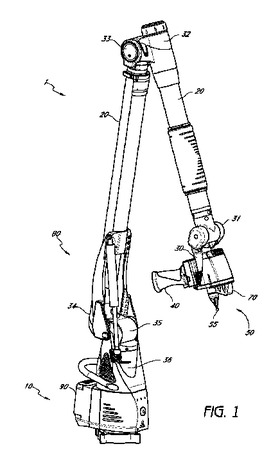 (もっと読む)
(もっと読む)
リニアゲージ
【課題】リニアゲージ内にダスト等の異物が進入することを防止できるリニアゲージを提供すること。
【解決手段】リニアゲージ100の外筒11の開口端部11aには、パッキン材10が装着されている。パッキン材10は、リング部10aと、このリング部10aの内周側に設けられた複数の内周側凸部10bと、リング部10aの外周側に設けられた複数の外周側凸部10cとを有する。リング部10aの内周側凸部10bは、軸体3のスプライン溝3aの形状に対応する形状を有し、そのスプライン溝3a内に嵌まり、スプライン溝3aに接触している。これにより、異物が本体内に進入することを防止することができ、また、スプライン溝3a上に異物がたまった場合でも、例えば軸体3の動作時に、内周側凸部10bによりその異物をスプライン溝3aから掻き出すように除去することができる。
(もっと読む)
細長いワークピースの内弧または外弧の部分の長さを測定する方法
【課題】曲げ動作中の細長いワークピースにおける曲げ部分の長さを正確に測定する方法を提供する。
【解決手段】前進方向に沿って曲げ機械において移動する細長いワークピースTの外弧または内弧の部分の長さを測定する方法であって、細長いワークピースTが、複数の断面であってそれぞれが細長いワークピースTが曲げられているときに中立軸によって伸張部分及び収縮部分の双方に分けられる複数の断面と、少なくとも中立的なすなわち曲げられていない断面であって細長いワークピースTの湾曲がワークピースTの前進方向に沿って中立的な断面を越えて始まる中立的な断面とを有し、長さの測定が測定器具4によって実行され、測定器具4が測定中に測定器具4が中立的な断面の近傍で細長いワークピースTの外弧または内弧のいずれかの点と係合するように位置付けられている。
(もっと読む)
21 - 40 / 134
[ Back to top ]