
Fターム[2F065QQ00]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761)
Fターム[2F065QQ00]の下位に属するFターム
サンプリング (206)
ピークホールド (43)
A/D変換、多値化 (3,603)
信号の遅延 (75)
信号の微分、差分 (1,068)
信号の積分 (316)
フーリエ変換;逆フーリエ変換 (544)
近似式(例;多項式近似) (1,899)
形状特定のためのパラメータ抽出 (463)
信号の記憶 (4,476)
信号の比較、減算 (4,276)
信号の加算 (639)
信号の特定位置の検出 (2,005)
画像処理(1次元を含む) (5,599)
統計処理 (2,372)
ゲート手段の利用 (33)
カウンター (263)
Fターム[2F065QQ00]に分類される特許
861 - 880 / 881
高温体の距離測定装置、形状測定装置、耐火構造物の健全性評価装置、高温体の距離測定方法、形状測定方法及び耐火構造物の健全性評価方法

【課題】 高炉に熱風を供給するための熱風管の内壁面に施工された耐火煉瓦の他、高炉、熱風炉、転炉等の測定対象内部に存在する高温体までの距離や形状を精度良く測定できる小型・軽量で可搬性に優れた装置及び当該装置を用いた測定方法を提供する。
【解決手段】 測定対象C内部に存在する高温体Bに向けて測定対象Cに設けられた開口部を介してレーザ光を投光し、高温体Bで反射したレーザ光を受光することにより、高温体Bまでの距離を計測するレーザ距離計11と、レーザ距離計11から出射したレーザ光を偏向するための耐熱性固定ミラー12と、固定ミラー12で反射したレーザ光を高温体Bに向けて偏向走査するための耐熱性可動ミラー機構13とを備え、固定ミラー12及び可動ミラー機構13は、レーザ距離計11からのレーザ光の出射方向に沿ってレーザ距離計11から離間して配置されている。
(もっと読む)
内径測定装置および内径測定装置用光誘導器

【課題】本発明はレンズを用いることなく、順次拡径するリング状光束照射ができるようにして、構造が簡単で、小型化、低コスト化を図ることができる内径測定装置および内径測定装置用光誘導器を得るにある。
【解決手段】透孔が形成された筒状の測定物を支持する支持具と、光源からの光束をレンズを用いることなく順次拡径する所定幅のリング状光束あるいは少なくとも3本の光束に形成して、前記支持具で支持された測定物内で反射するように出射する光誘導器と、前記測定物内で反射されたリング状光束あるいは少なくとも3本の光束を検知し、該リング状光束あるいは少なくとも3本の光束の直径等から測定物の内径を演算処理する受光部を備える演算処理装置とで内径測定装置を構成している。
(もっと読む)
信号増幅方法及び信号増幅装置、並びに異物検査方法
【課題】入力信号に対する応答速度を保ったまま、強度の変化が大きい信号を1つの増幅手段で増幅する。
【解決手段】アンプ12は、抵抗R1と共に帰還増幅回路を構成する。基準電圧発生回路14、クランプ回路15、オフセット回路16、反転ゲイン回路17、電界効果トランジスタ(FET)18及び抵抗R2は、帰還増幅回路の利得を制御する利得制御回路を構成する。クランプ回路15は、信号増幅装置10の入力電圧を、基準電圧発生回路14が発生した基準電圧でクランプする。オフセット回路16は、クランプ回路15の出力電圧をマイナス側へオフセットする。反転ゲイン回路17は、オフセット回路16の出力電圧の極性を反転させて増幅する。電界効果トランジスタ18は、反転ゲイン回路17の出力電圧を制御電圧として動作し、電源V2から抵抗R2を介して帰還増幅回路の帰還ループに電流を加える。
(もっと読む)
複雑な層構造の厚さ分析のための方法および装置
半導体ウェハのパターン形成領域の層厚を測定するための厚さ測定装置は、パターン形成領域から取られた反射データを得、そこから周波数スペクトルを得るためのスペクトルアナライザと、前記スペクトルを探索して前記スペクトル内のピーク周波数を見出すためのピーク検出器であって、前記探索をそれより前の学習段階で見出されたピーク周波数に対応する領域に限定するように動作可能であるピーク検出器と、前記ピーク周波数付近の前記スペクトルをフィルタリングするための、前記ピーク検出器に関連付けられた周波数フィルタと、前記学習段階で得たパラメータを使用して、前記フィルタリングされたスペクトルの最尤適合を実行し、少なくとも所望の層厚を得るための最尤フィッタと、を備える。高分解能の非実時間学習段階でそれより前に得られたパラメータを用いて最尤適合を実行することにより、実時間に高分解能の結果が提供できる。  (もっと読む)
(もっと読む)
斜入射干渉測定による平行度、平面度の同時測定
【課題】 粗面における干渉縞のコントラスト、測定効率を改善するものである。
【解決手段】 不透明な試料の表裏面の平行度を同時に平面度を測定するために、両面に干渉計を設置し、プリズムを用いて試料への入射角を大きくした。平行度及び平面度の計算方法は、試料をプリズムの底面に垂直な方向に一定の距離で動かし、干渉縞の変化を画像処理し、表裏それぞれの面について位相シフト法により計算する。本発明では、様々なサイズや表面粗さを持つ不透明な試料に対応可能ということと、表裏面同時計測による測定時間の短縮が可能である。斜入射にすることで粗面における干渉縞のコントラストを良くし、かつ、斜入射干渉計を表裏それぞれに設置することで、不透明な粗面試料の平行度及び平面度測定を同時に秒単位で行うことが可能である。
(もっと読む)
光学式変位計
【課題】発光素子の発光量や増幅器の増幅率のフィードバック制御を行うことの利点を残しながら、計測の高速化に対応可能な光学式変位計を提供する。
【解決手段】光学式変位計は、対象物に光を照射するための発光素子と、対象物からの光を受光して画像信号を生成するためのイメージセンサーと、イメージセンサーからの画像信号を増幅する増幅器を含む信号処理回路と、信号処理回路からの画像信号に基づいて発光素子の発光量及び増幅器の増幅率を含む操作量の少なくとも一つのフィードバック制御を実行する制御部とを備え、フィードバック制御における操作量の少なくとも一つの可変幅が変更設定可能である。制御部は、可変幅設定モードにおいて所定期間の操作量のデータに基づいて操作量の適切な可変幅を設定する。
(もっと読む)
画像生成方法及び装置
【課題】 現実世界又はその映像に位置合わせされたCG画像を生成する画像生成方法において、任意の現実物体について、CG画像を重畳した状態としない状態とを観察者が容易に観察可能とすること。
【解決手段】 CGを重畳しないCGマスク領域を設定しておき、CGマスク領域に含まれる現実物体にはCGを重畳しないようにする。任意の現実物体について選択的にCGが重畳された状態と重畳されない状態とを観察することが可能になる。
(もっと読む)
画像処理装置及びロボット装置ならびに車両誘導装置
【課題】
画像処理装置において、広い範囲にある対象物に対して、屋外や強い照明下においても安定して形状復元する。
【解決手段】
画像処理装置において、画像入力手段1aが時系列的に入力した画像上の特徴的な点の位置関係の変化を第1の計算手段1bが抽出する。位置関係の変化から特徴的な点の三次元位置と画像を捉えた際の視点の位置と方向を第2の計算手段1cが計算する。入力した画像と特徴的な点の三次元位置とから画像に捉えられている物体の三次元形状データを第3の計算手段が計算する。
(もっと読む)
サインに基づく人間−機械相互作用
コミュニケーションは、人間−ロボット相互作用における重要な問題である。サインは、ユーザの命令又はコマンドを提供することにより機械との相互作用に用いられる。本発明の一実施形態は、人間の検出、人間のボディパーツ検出、手形状分析、軌道分析、向き決定、ジェスチャマッチング等を含む。形状及びジェスチャの多くの型が、コンピュータビジョンに基づく煩わしくない様式で認識される。多くのアプリケーションが、家電の遠隔制御、コンピュータ制御装置のマウスレス(及びタッチレス)操作、ゲーミング及び他方に命令を与えるための人間−ロボットコミュニケーションを含むこのサイン理解技術により実現可能となる。動的な検出ハードウェアが、ビデオレートでの深度画像のストリームを取得するために用いられ、深度画像のストリームは、情報抽出のために順次分析される。 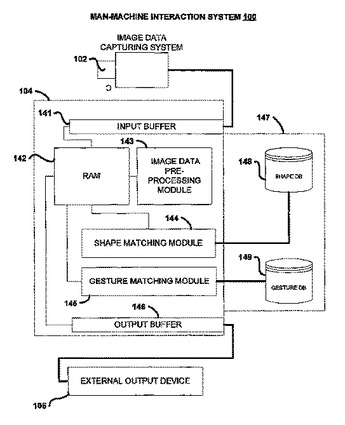 (もっと読む)
(もっと読む)
反射光源を使用する位置推定方法および装置
本発明は、反射される光源(204、205)を用いて、ローカルまたはグローバル座標系に対する物体(201)の位置および姿勢の推定に概ね関する。本方法および装置の一般的な応用には、自律型移動ロボットの位置の推定および追跡が含まれる。他の応用には、位置認識、ユビキタスデバイスのための物体の推定および追跡が含まれる。別の応用には、室内環境における人またはペットの位置の追跡が含まれる。本方法および装置は、面(206)から反射した、1つまたはそれ以上の放射された光源(201、205)の信号を検出することに少なくとも部分的に基づいて、複数の光センサの少なくとも1つの光センサの位置および姿勢を測定するように、1つまたはそれ以上の光エミッタ(203)と、1つまたはそれ以上の光センサ(202)と、信号処理回路構成要素と、信号処理方法とを含む。  (もっと読む)
(もっと読む)
深度情報を含む画像の生成方法と装置
深度情報を含む画像を生成する方法と装置が提供される。この方法では、場面から発する放射を検出し、異なる面における場面の少なくとも2つの画像を形成する。各画像は強度データ値のセットを有する。データ値の変動が得られ、強度分散の2つのセットがデータ値から得られ、強度分散データは深度情報を得るために処理される。深度情報は、画像データにおける異なる深度情報を識別するためにコード化される。
 (もっと読む)
(もっと読む)
連続変化するオフセットマークと、オーバレイ決定方法
【課題】
【解決手段】本発明は、オーバレイマークと、オーバレイ誤差を決定する方法とに関する。本発明の一態様は、連続的に変化するオフセットマークに関する。連続的に変化するオフセットマークは、位置の関数として変化するオフセットを有する周期構造を重ね合わせた1つのマークである。例えば、周期構造は、ピッチなどの格子特性に関する値が異なる格子に対応してよい。本発明の別の態様は、連続的に変化するオフセットマークからオーバレイ誤差を決定する方法に関する。その方法は、一般に、連続的に変化するオフセットマークの対称中心を決定する工程と、それをマークの幾何学的中心と比較する工程と、を備える。オーバレイがゼロである場合には、対称中心は、マークの幾何学的中心と一致する傾向がある。オーバレイがゼロでない場合(例えば、2つの層間にずれがある場合)には、対称中心は、マークの幾何学的中心からずれる。その位置ずれを、連続的に変化するマークの予め設定されたゲインと組み合わせて用いることで、オーバレイ誤差を算出する。
(もっと読む)
三次元ビデオスキャナ
少なくとも一つの波長を有する光を分析するための装置であって、光を偏向して光の少なくとも一つの波長に相当する少なくとも一つの波長依存角度を特徴とする偏向された光ビームを与える偏光器(12)と、偏向された光ビームを符号化して少なくとも一つの波長依存角度に相当する少なくとも一つの角度依存偏向状態を特徴とする符号化された光ビームを与えることができる符号器(20)と、符号化された光ビームを復号して光の少なくとも一つのスペクトル成分を決定するための復号器(24)とを含む。 (もっと読む)
不変特徴部を有する平面上で長寸の物体の先端の絶対位置を決定するための方法及び装置
【課題】 ユーザフレンドリな入力インタフェースを提供する。
【解決手段】 長寸の物体の姿勢と、不変特徴部がある平面に物体の先端が接触する間に先端の絶対位置とを決定する装置及び方法を提供する。この方法は、プローブ放射線により平面及び不変特徴部を照明する過程と、平面及び不変特徴部から長寸の物体の軸線に対して角度τで長寸の物体に戻るプローブ放射線の散乱部分を検出する過程を提供する。姿勢は、散乱部分の反応から表面及び不変特徴部または特徴部へ導き出される。表面上の先端の絶対位置は、姿勢と、不変特徴部に関する情報から求められる。
(もっと読む)
位置検出方法、露光方法、位置検出装置、露光装置及びデバイス製造方法
パラメータの自由度が小さいモデルM’のAIC(M’)と、パラメータの自由度が大きいモデルMのAIC(M)との小さい方をEGAのモデルとして選択する(ステップ502)。モデルMが選択され、その残差が所定値以上である場合には、モデルMよりもパラメータ自由度が大きいすべての係数がパラメータであるモデルが選択される。有効サンプル数が、このモデルでのパラメータ自由度よりも小さい場合には、有効サンプル数を増やし、さらにサンプルショットを追加計測する。今回選択されたモデルの係数を、次回のウエハアライメントの際の事前知識に反映する(ステップ524)とともに、今回のモデルのパラメータの自由度に応じて、有効サンプル数を増減させる(ステップ508又はステップ518)。 (もっと読む)
三次元及び色彩検出における電荷管理のための方法及び装置
本発明の様々な実施形態では、オンチップ測定情報を、順番にではなく、ランダムに出力することができ、三次元画像を必要とするオブジェクト追跡、及び他の情報のためのオンチップ信号処理を、すぐに遂行することができる。システム全体は小さく、強固で、かなり少ないオフチップの別個の構成要素を必要とし、かつ、検出信号特性の改善を示す。オンチップ回路は、そのようなTOFデータを使って、場面内の一つのオブジェクト、又は全てのオブジェクト上の全ての点の距離及び速度を、同時に、容易に測定することができる。同様に、オンチップ回路はまた、検出センサ内の各画素における検出画像の分光組成を特定することができる。有利なことに、その個々の画素が分光組成を特定することができるセンサを使用して、さらに、TOF情報を特定することもできる。  (もっと読む)
(もっと読む)
遠隔映像検査アプリケーションにおける自動欠陥検出方法及びシステム
本システムは、仕様書を越える可能性のある領域の表示をオペレータに提供する、或いは前記オペレータによるより詳細な分析を要求する遠隔映像検査装置からの画像の分析を自動的に実行する。パターン認識アルゴリズムは、前記画像の異常或いは欠陥を調査するため連続画像に適用される。前記調査領域は、最初、欠陥の可能性がより高い、検査されるアイテムのエッジに制限される。処理要求及び誤検出の可能性を減らすために、調査領域は制限された視野及び奥行きに狭められる。へこみ及び小さな割れなどの欠陥は、立体測定技術を用いて、或いは公知の補足画像を欠陥と予測することで検出される。この技術は、画像相違マップを提供するのに用いられる。公知の三角アルゴリズムを用いて、前記マップは奥行き及び距離情報を前記処理システムに提供する。  (もっと読む)
(もっと読む)
実立体モデル作成装置、立体データ作成装置、疑似立体データ作成装置並びにその方法
【課題】 レーザ光を対象物上にスキャンして三次元形状データを得るには、そのスキャンにかなりの時間がかかりその間対象物が静止している必要があり、人物などの三次元形状データを得るのは、難しいという問題があった。
【解決手段】 データ入力部10において、カメラを用い対象物の複数の画像を得る。この画像に基づいて、モデリング部12において、色彩データを含む三次元形状データを得る。この三次元形状データに基づいて成形部14において実立体モデルを成形する。これは切削や成形型による成形によって行われる。そして、色づけ部16により、色彩データに基づいて、実立体モデルに対し色づけが行われる。
(もっと読む)
多層プリント配線板と、その層間ズレの測定方法
【課題】 多層プリント配線板の内層の各導体層の変形量を観測、記録する。
【解決手段】 多層プリント配線板60の内層用の両面配線板61の表裏の導体層に中実ガイドマーク22と中空ガイドマーク23が形成され、例えば、中実ガイドマーク22−1bに、隣接した導体層に設けられた中空ガイドマーク23−2aが同心に配置され、隣接した導体層毎に同心に配置された中実、中空ガイドマーク22、23を形成する。X線カメラの視野内に納まる外形のガイドマーク枠21内に、例えば3行3列に、同心の中実、中空ガイドマーク22(1a〜5a)、23(1b〜5b)の組が配されている。ガイドマーク群20は多層プリント配線板の、たとえば4隅に配置され、1個のガイドマーク群は1回のX線照射で枠内のガイドマーク全ての像を取り込み、それらの座標値が計算される。4個のガイドマーク群内のガイドマークの座標値から、各導体層に形成された配線用パターンの変形量が計算され、結果を記録できる。
(もっと読む)
透明膜の段差の測定方法及び位相シフトマスクの作成方法
【課題】透明膜の段差の測定方法に関し、非接触、非破壊で且つ簡単な操作で高速、高精度に位相シフターの段差を測定すること。
【解決手段】第1の透明膜1の一部に形成された複数の第1の溝Sa1 ,…,San の段差量t1 ,….tn と該第1の溝Sa1 ,…,San からの反射光の偏光状態を示すパラメータの値との相関関係f1 を求めてデータベース化した後に、第2の透明膜42の一部に形成された第2の溝45の反射光の偏光状態を示すパラメータの第1の値を計測して、該第1の値と前記データベースの前記相関関係に基づいて該第2の溝45の第1の段差量を求める工程を含む。
(もっと読む)
861 - 880 / 881
[ Back to top ]