
Fターム[3D114AA03]の内容
自動車の製造ライン・無限軌道車両・トレーラ (5,462) | 目的、効果 (1,242) | 生産効率の向上 (560)
Fターム[3D114AA03]の下位に属するFターム
組付、組立て、取外の容易性 (194)
生産工程数の低減 (29)
搬送効率の向上 (100)
時間の短縮 (83)
Fターム[3D114AA03]に分類される特許
21 - 40 / 154
多種混合組立ラインの制御システム
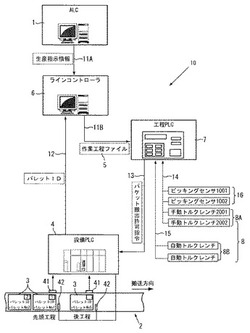
【課題】作業ミスが少なく生産性の高い多種混合組立てラインの制御システムを提供する。
【解決手段】本発明にかかる多種混合組立てラインの制御システム10は、車種に関する生産情報を送信するライン制御部1と、生産ライン2上にあるパレット3の情報を取得して送信するライン設備動作制御部4と、車種別の作業工程データが設定可能であり、ライン制御部から送信された生産情報とライン設備動作制御部から送信されたパレットの情報と作業工程データに基づいてパレット毎の作業工程ファイル5を作成するラインコントローラ6と、ラインコントローラで作成された作業工程ファイル5に基づいて各工程での作業指示と各作業工程で用いる機器8を制御する工程制御部7とを有している。
(もっと読む)
搬送装置

【課題】簡単な構造でコンパクトな汎用性の高い搬送装置を提供する。
【解決手段】搬送装置1は、支持手段21に支持されたトレー11の下方位置で、無端の駆動チェーン33をトレー11の循環経路に沿って走行させて、チェーン案内手段32Bによって直進動作の開始位置から終了位置まで案内し、直進動作の終了位置で駆動チェーン33の走行方向を列方向から横方向に変更し、横進動作の開始位置から終了位置まで案内し、横進動作の終了位置で駆動チェーンの走行方向を横方向から列方向に変更する。そして、トレーブロックへの押し当てが直進動作の開始位置から終了位置までの間と横進動作の開始位置から終了位置までの間で交互に行われるように複数のローラアタッチ34を駆動チェーン33に所定のピッチで設ける。
(もっと読む)
不具合解析装置
【課題】不具合の原因を明らかにして、その再発防止を図る。
【解決手段】不具合解析装置1は、複数の作業工程10を有し、かつ複数の作業工程10の下流側に検査工程20が設けられている製造ラインに設置されるもので、複数の作業工程10のうち、所定の作業工程10における作業状態を撮像する撮像手段(固定型カメラ60、小型カメラ70)と、撮像手段で得た複数の映像データを記憶する記憶手段80と、検査工程20で不具合が発見された場合に、記憶手段80に記憶されている複数の映像データの中から、不具合が発生したワークWの所定の作業工程における作業状態が映った映像データを選択する選択手段とを備えたことを特徴とする。
(もっと読む)
対象物を支持構造に固定するためのロック装置及び同装置を有するスキッド
本発明は、解放位置とロック位置との間で移動可能な固定部材72と、カウンター部材28とを有する、対象物12、特に車両ボディを支持構造14、特にスキッド、に取外し可能に固定する装置に関する。対象物12を、それに対応づけられた保持構成部分34を介してロック位置内の固定部材72とカウンター部材28との間でロック可能である。固定部材72が、ロック位置において、カウンター部材28上に近づき、かつそれから離れるように移動可能である。固定部材72が、ロック位置において、付勢装置136によって付勢を受けながら対象物12の保持構成部分34に対してカウンター部材28の方向に押圧可能である。本発明は、さらに、上記の固定装置を有しているスキッドに関する。 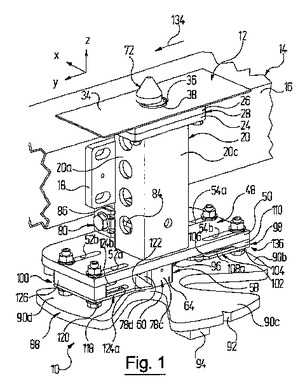 (もっと読む)
(もっと読む)
オーバーヘッドコンベア
【課題】互いに隣り合う作業工程エリア間の一搬送距離を必要時に変更する作業が比較的容易で、しかも、管理が比較的容易でメンテナンスの頻度も比較的低いオーバーヘッドコンベアを提供する。
【解決手段】走行レール1に懸架されたハンガー装置2と、その上部より突設された搬送力受け部材3と、走行レール1の近傍に並列配備された駆動レール4と、前記駆動レール4に支持されるバー状主部材5とラック6とで形成されると共にレール長手方向Xに長い搬送力伝達杆7と、ラック6に噛合するピニオンギヤ8を駆動することで搬送力伝達杆7を一搬送距離S1の間で往復走行させる駆動手段9と、バー状主部材5の長手方向での所定箇所に締結され、搬送力伝達杆7の往動時に搬送力受け部材3を係止してハンガー装置2を一搬送距離S1だけ搬送させ、搬送力伝達杆7の復動時に離脱変位して搬送力伝達杆7を戻り移動させる係脱手段11と、を備えた。
(もっと読む)
ドア塗装用治具
【課題】センタレールから塗装膜が飛散しにくいと共に、スライドドア及びドア開口部における縁部の塗装を容易に行うことができるドア塗装用治具を提供する。
【解決手段】スライドドア11の車両内側に、水平方向に回動可能なドア支持部2が取り付けられている。また、車両本体に固定配置され、鉛直方向を向く回転軸線を中心としてドア支持部2を回動可能に保持する回転部3を備える。ドア支持部2は、スライドドア11と接続する第1接続部4と、回転部3と接続する第2接続部5との間の距離が、スライドドア11の移動に伴って変化するよう構成されている。そして、スライドドア11が車両のドア開口部7を閉じる閉位置と、スライドドア11の後端部110が車両後方へ最も移動した開位置と、スライドドア11の後端部110が車両側方へ最も移動したワイド開き位置との間で、スライドドア11を移動可能に保持するよう構成されている。
(もっと読む)
塗装システム
【課題】例えば、車体本体に対して揺動可能に連結されたドア等を容易に開状態とすることが可能であり、しかも、作業効率に優れる塗装システムを提供する。
【解決手段】塗装システム10は、塗装ロボット14a〜14dと、オープナーロボット16とを有する。例えば、塗装ロボット14a〜14dは、壁24、26に敷設された第1案内レール28に変位自在に係合された走行台車32を介して設けられ、一方、オープナーロボット16は、壁26に敷設された第2案内レール30に変位自在に係合された走行台車34を介して設けられる。
(もっと読む)
ハンドガイド装置とその制御方法
【課題】装置の可動範囲内で組付を完了できるハンドガイド装置とその制御方法を提供する。
【解決手段】ワーク3を把持するワーク把持装置12と、ワーク把持装置を有する細長いハンド14と、ハンドの末端部を片持ち支持し末端部を所定のロボットエリア内で移動可能なロボット16と、ハンドの先端部に設けられロボットの作動を操作するオンハンド操作盤18と、ロボットを制御するロボット制御装置20とを備える。ハンド14は、作業対象物2にワーク3を組付ける際に、オンハンド操作盤18が作業対象物からロボットの反対側に突出する長さを有している。ロボット制御装置20は、ロボット16を自動制御する自動モードと、ロボット16をオンハンド操作盤18により手動制御する協働モードとを有しており、人6の判断や経験を必要とする作業時のみ協働モードに切替え、その他の作業を自動モードで実行する。
(もっと読む)
インストルメントパネルの取付装置及び取付方法
【課題】車室内にインストルメントパネルを高精度に取り付けることを可能にするインストルメントパネルの取付装置及び取付方法を提供する。
【解決手段】インストルメントパネルの取付装置10は、ボディ14における対称位置で左右一対の車体側測定基準部120の車幅方向位置を計測する一対の第1変位計112と、車室内に搬入される前のインストルメントパネル24における対称位置で左右一対のインパネ側測定基準部122の車幅方向位置を計測する一対の第2変位計116と、第1変位計112及び第2変位計116によって得られる信号から、平面視のボディ中心位置C1及びインパネ中心位置C2を求める演算部134と、演算部134から供給される中心差ΔCに基づいてインストルメントパネル24の車幅方向位置を調整する調整手段85とを有する。
(もっと読む)
生産ライン
【課題】生産効率を低下させることなく、人手で取り付けを行う人手取付ゾーンを備える生産ラインを提供すること。
【解決手段】生産ライン1は、サスペンション取付位置Aに位置する車両10にフロントサスペンション11を取り付けるフロントサス用取付装置30と、フロントモジュール取付装置51の上流側に設けられ、サスペンション取付位置Aに位置する車両にリアサスペンション12を取り付けるリアサス用取付装置40と、を備え、フロントサス用取付装置30の下流側には、人手によりフロントサスペンション11を取り付けるフロントサス用人手取付ゾーン50が設けられ、リアサス用取付装置40の上流側には、人手によりリアサスペンション12を取り付けるリアサス用人手取付ゾーン60が設けられる。
(もっと読む)
生産順序再計画システム、生産順序再計画装置及び方法
【課題】遅延車両など、予め計画された生産計画順序の遵守が不可能となった車両が発生した場合に、遅延車両を考慮した生産計画順序を再計画できるようにする。
【解決手段】修正作業工程へ投入される車両を検出する車両通過検知装置4と、車両の修正作業の所要時間が入力される修正作業所要時間入力装置2A、2Bと、生産順序再計画装置1とを備え、生産順序再計画装置1が車両通過検知装置4から修正作業工程へ投入される車両を検出したとの通知を受けると、修正作業所要時間入力装置2A、2Bから入力された修正作業所要時間を基に、組立工程における車両生産順序を再計画する。
(もっと読む)
車載カメラ校正システム、車載カメラ制御装置、設備制御装置、車載カメラ校正方法
【課題】より精度の高い校正を行うことができる車載カメラ校正システム、車載カメラ制御装置、設備制御装置、車載カメラ校正方法を提供する。
【解決手段】車載カメラ校正システム1は、設備側に設置された校正指標8の位置情報を記憶する記憶手段3aと、車両に搭載された車載カメラ2の校正を車載カメラ2の撮像した画像内に位置する校正指標8と位置情報に基づいて行う校正手段3bと、校正指標8の現在位置情報を測定する校正指標測定手段7と、位置情報を現在位置情報に基づいて修正する修正手段3cを備えることを特徴とする。
(もっと読む)
蓋開閉システム、蓋開閉用治具および蓋開閉方法
【課題】対象物の本体部材に開閉可能に取り付けられる蓋部材を確実に開閉することが可能な蓋開閉システム、蓋開閉用治具、および蓋開閉方法を提供する。
【解決手段】自動車1のドア3を開閉するドア開閉システム100に、ドア3に固定される胴体部111、基準面136aが形成される位置決め板136、待機位置と解除位置との間で移動する解除部141、並びに治具側係合部151を備えるドア開閉用治具110と、フック172およびフック172の先端部から投受光する光学式センサ173を有するアーム側係合部171を備える操作アーム170と、基準面136aで反射されて光学式センサ173で受光される光により検出された相対位置に基づいてアーム側係合部171を解除部141に当接させてドア3の係止を解除するとともに治具側係合部151に係合した状態でアーム側係合部171を移動させてドア3を開く制御装置181と、を具備した。
(もっと読む)
ホイール用ウェイト取付装置及びその使用方法
タイヤ・ホイール組立体TWのホイールWのためのウェイト取付装置10,100,200が開示される。ウェイト取付装置10,100,200は、アーム部12と、アーム部12に連結された取付装置部14,202と、を備える。取付装置部14,202は、ラジアル方向に延在するフランジ部16を備える。ラジアル方向に延在するフランジ部16は、アーム部12に連結されている。第1のプランジャ部18,18a,18bは、一つ以上の第1のラジアルアーム28によって、ラジアル方向に延在するフランジ部16に移動可能に連結されている。方法についても開示される。 (もっと読む)
車体精度傾向管理システム
【課題】
品質管理者が車体精度の異常の兆候予測を行うことができ、品質向上、開発・管理コスト低減を行うことができる車体精度傾向管理システムを提供する。
【解決手段】
車体精度傾向管理システムは、車体製造の各種工程で設けられている検査で測定された複数の測定値を測定部位毎に測定時刻とともに入力する入力装置20及び通信部18と、入力された測定値群を測定部位毎に時系列で保存する測定値データベース56を備える。前記システムは、測定部位毎に前記測定値群の統計処理を行い、所定の時間単位毎の平均値と標準偏差、又は、所定の時間単位毎の平均値と測定値の最大値及び最小値を出す処理装置10を備える。前記システムは、前記統計処理の結果を時系列でグラフにし、該グラフと該測定部位の管理値(基準値)とを出力するディスプレイ30を備える。
(もっと読む)
ドア取り外しシステムおよびドア取り外し方法
【課題】ドアをボディから確実に取り外しできるドア取り外しシステムを提供すること。
【解決手段】ドア取り外しシステムは、自動車のボディ10にボルト12で固定されたドア11を、このボディ10から取り外す。このドア取り外しシステムは、ドア11を把持して搬送可能な双腕ロボットと、ナットランナ71と、双腕ロボットおよびナットランナ71を制御する制御装置と、を備える。制御装置は、双腕ロボットによりドア11を把持し、ナットランナ71のソケットをボルト12に嵌合して、ナットランナ本体によりソケットを所定回転数だけ回転させ、ソケットの後退距離xを測定し、この測定した後退距離xが所定距離以上である場合には、ボルト12が外れたと判定する。
(もっと読む)
自動車車両シール確認システム
【課題】従来、作業者が車両に貼設されるシールの有無を確認後、ペーパーリストにより、車両とシールを対比して一致、不一致を確認しており、非常に能率が悪かった。
【解決手段】自動車車両に貼設されるシールの場所を撮影可能な撮影機と、撮影機と接続する画像処理装置と、画像処理装置と接続するライン制御盤を有し、ライン制御盤は車両の種類、貼設されるシールの有無及びシールナンバーを個々に車両情報として入力しており、撮影機が撮影した画像を画像処理装置に送り、画像処理装置は、送信されてきた画像をライン制御盤に送信し、ライン制御盤は、画像処理装置から送信されてきた画像の情報と、その画像に対応する予め入力されている個々の車両情報とを比較し、一致すればOKと判定し、不一致ならばNGと判定して異常報知装置によって作業者に異常を知らせる自動車車両のシール確認システムによる。
(もっと読む)
フロントアクスル支持用治具
【課題】フロントアクスルFAを自動車ボディーBへ取付けた後に、自動的にフロントアクスルFAから離れて支持を解除すると共に、下降時にフロントアクスルFAと干渉しない治具を提供する。
【解決手段】フロントアクスルFAを立てた状態で支持可能な治具であり、車軸の前側に位置する基台部2と、基台固定部と回動自在に軸支されるフロントアクスル外れ止めアーム3と、外れ止めアーム3の回動端に回動自在に取付けるフロントアクスル外れ止めプレート5とから構成する。
フロントアクスル外れ止めアーム3は、フロントアクスルFA支持状態では略水平に位置し、非支持状態では略垂直に位置するように回動する。
フロントアクスル外れ止めアーム3には、基台部2との間で補助力を作用させるアーム逃がし用ダンパーを設ける。
(もっと読む)
パワーアシスト装置、自動搭載装置、およびそれらの制御方法
【課題】パワーアシスト装置および自動搭載装置によってワークを搬送している途中に、パワーアシスト装置等が停止してその後再起動する際にワークや組み付け対象物が破損することを防止するために、パワーアシスト装置等によってワークを搬送している途中に、パワーアシスト装置等が停止してその後再起動しても、ワークが組み付け対象物等と接触することがないパワーアシスト装置、自動搭載装置、およびそれらの制御方法を提供する。
【解決手段】ウィンドウ19とボディ20が接近状態にあると判定される場合には、状態信号が、運転状態から停止状態に移行した時点から、パワーアシスト装置用制御装置8によって、ボディ20に対するウィンドウ19の組み付けが完了した旨の判定処理が成される時点までは、パワーアシスト装置用制御装置8によって、パワーアシスト装置2からコンベア15に対して、停止要求信号を継続して発信する。
(もっと読む)
作業台車及びそれを用いた搬送装置
【課題】コンベアを離れた状態で自在に手押しなどによる搬送を可能とする状態と、コンベアにより搬送が行われるコンベア搬送状態とを円滑に実現することができる。
【解決手段】作業台車1は、床面Fを転動するキャスター6を備え、ワークを載せて作業を行うためのものであって、搬送用のコンベアに係脱自在に係合させるための係合部材20、21を備え、この係合部材20、21は、キャスター6の下端以上の位置に待避した待避状態から、キャスター6の下端より下方に進出した進出状態とを選択可能とされている。
(もっと読む)
21 - 40 / 154
[ Back to top ]