
Fターム[2F063GA01]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 磁気的手段を用いた検出器 (1,967) | 電磁誘導型、コイルによる検出 (846)
Fターム[2F063GA01]の下位に属するFターム
インダクタンスの変化を検出 (379)
差動変圧器型 (45)
シンクロ (2)
レゾルバ (87)
インダクトシン (2)
マグネシン
巻線の形状、構造 (68)
固定子巻線のないもの
固定子巻線に直流が流れるもの (2)
固定子巻線に交流が流れるもの (31)
移動子、回転子に巻線のないもの (11)
移動子、回転子の巻線に直流が流れるもの
移動子、回転子の巻線に交流が流れるもの (20)
コアの形状、構造 (31)
コア位置をずらしたもの
コア材料 (8)
Fターム[2F063GA01]に分類される特許
61 - 80 / 160
パルス信号発生装置、回転機、制御装置およびパワーウィンド制御装置

【課題】回転体の回転検出を無電源で、しかも低コストに実現可能な装置を提供する。
【解決手段】モータの回転に応じて磁気検出器24または26(より正確には磁性ワイヤ70)と、これに対向するマグネット22の磁極と、回転軸20とにより磁路が形成される。磁性ワイヤ70が大バルクハウゼンジャンプを起こしうる磁性体からなるため、モータの回転に応じて各磁気検出器に対向する磁極が切り替わるごとに磁路を形成する磁界の方向が急峻に切り替わり、磁気検出器からその切り替わりに応じたパルス信号が出力される。磁性ワイヤ70はマグネット22から受ける磁束密度の変化によってその磁化方向が切り替わるため、検出コイルが受ける磁束の変化による誘導起電力が発生し、磁気検出器からは無電源にてパルス信号の出力が可能になる。
(もっと読む)
切替電力供給ノイズの抑制を伴う磁歪変位変換器
変換器116は、磁歪要素102上の繰り返しパルス120を感知し、変換器出力バースト122を提供する。変換器回路126は、変換器出力バーストを検出する。エネルギー貯蔵デバイス130は、変換器回路の電力入力128に結合する。切替電力供給132は、エネルギー貯蔵デバイスに結合し、その間に切替電力供給の切替が抑制される繰り返し抑制状態を有する。シーケンス回路140は、変換器出力バーストとの切替電力供給の繰り返し抑制状態の同期化を提供する。 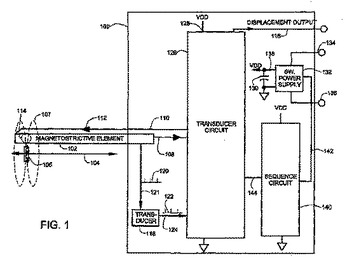 (もっと読む)
(もっと読む)
位置測定装置

【課題】 位置測定装置を構成する送信系コイルと受信系コイルのうち、送信系コイルを小さくする。
【解決手段】 位置測定装置は、第一の地点に配置された一軸の励磁コイル14と、該励磁コイルに交流信号を供給して励磁するための信号発生回路と、中心軸が互いに直交するようにして第二の地点に配置された第一、第二、第三の検出コイル21−1、21−2、21−3と、前記第一、第二、第三の検出コイルの出力から電圧信号を得る回路とを含む。前記励磁コイルを励磁した時に前記第一、第二、第三の検出コイルに誘起される誘起電圧を用いて予め定められた演算を行うことにより、前記検出コイルの座標系に対し前記励磁コイルの中心軸方向が既知であるとき前記第二の地点から前記第一の地点までの方位と距離を算出する。
(もっと読む)
無人飛行ビークルの飛行中燃料給油方法およびシステム
無人飛行ビークルに燃料給油するためのシステムおよび方法である。システムは第2の無人飛行ビークルから第1の無人飛行ビークルに燃料給油するように構成されており、予め定められた距離内で近接して第1および第2のビークルを飛行し、飛行中に第2のビークルから第1のビークルへ燃料供給ラインで接続するための構成を含んでいる。示されている実施形態では、接続のための構成は第1のビークル上の燃料給油レセプタクルを電磁的に検出する標的システムを含んでいる。追尾装置が第2のビークル上の前記燃料供給ラインの第1の端部に配置されている。追尾装置は第1のビークル上のレセプタクル周囲の第1のコイルからの磁気信号を検出するように適合された3つの検出器コイルを含んでいる。コイルが取付けられ、それによって検出器コイルは異なる方向で指向する。コイルの出力はタンカーのUAVからのUAVまでの方向と距離を決定するために処理される。 (もっと読む)
位置計測方法
【課題】特定の位置を高精度で検出できる位置計測方法を提供する。
【解決手段】第1及び第2の励磁コイル41、42に交流電流を流して発生する磁束は、前記第1及び第2の励磁コイル41、42のコイル面が交差した線上に前記受信コイルの共通の不感帯部を形成するので、前記第1の受信コイル61の位置を変えながら前記第1の受信コイル61に誘起された信号を測定することで特定の位置を高精度で検出でき、X線を用いる放射線透過法において、撮影側のフィルムを貼る位置を正確かつ確実に特定でき、作業効率を向上することができる。
(もっと読む)
保護カバー、この保護カバーを有する車輪用転がり軸受装置
【課題】軸受装置の組み付け作業おける追加作業を無くし、かつ圧入時の磁気エンコーダー部の破損不具合を無くすようにした保護カバーをを提供する。
【解決手段】円環状の磁気エンコーダー部16を保護するための保護カバー20において、磁気エンコーダー部16を覆う円環状の第1円板部21と、この第1円板部21の外径端から軸方向に延び、凹部15の内周壁15bに嵌り込む円筒部22とによってカバー本体23が形成され、このカバー本体23にはアクスルシャフトAの軸方向において、凹部15の底部に遠い上側から近い下側に向って縮径される案内部24が形成され、アクスルシャフトAの軸方向において、保護カバー20に向って接近するように装着される車輪用転がり軸受装置10のスペーサF1、リテーナリングF2が案内部24によりアクスルシャフトAの中心線に対してセンタリングされるように案内されることを特徴とする。
(もっと読む)
電磁結合を利用する圧力分布検出装置及び物体検出装置
【課題】配線数を減少させることでコストを削減し、信頼性を向上させ、さらには検出領域以外の余分な領域を減らすことが可能な電磁結合を利用する圧力分布検出装置を提供する。
【解決手段】圧力分布検出装置は、複数の駆動側ループ状配線20と、これに直交する方向に配置される複数の検出側ループ状配線30と、これらがそれぞれ電磁結合するように構成される複数の電磁結合部36と、複数の駆動側ループ状配線を駆動する駆動部40と、電磁結合部36の電磁結合の度合いの変化を複数の検出側ループ状配線30から検出する検出部50とからなる。そして、複数の駆動側ループ状配線20及び複数の検出側ループ状配線30が、隣り合うループ状配線間の隣り合う線をグラウンド線として共通化する共通グラウンド線25,35を有する。
(もっと読む)
磁気軸受に支承されたシャフトのためのセンサ構造
本発明は、磁気軸受(2)に支承されたシャフト(1)のためのセンサ構造に関するものであり、磁気的にシールドされた領域を形成しながら磁気軸受(2)をシールドする磁気シールドと、磁気シールドされた領域でシャフト(1)に配置された磁気コーディング(10)と、磁気コーディング(10)の磁界の少なくとも1つの変化を検出する少なくとも1つの受信器(11)とを含んでいる。上述したセンサ構造は、本発明によると、シャフト(1)の磁気コーディング(10)を用いてシャフト(1)の位置をできるだけ磁気軸受(2)の近傍で検出することを可能にする、磁気軸受(2)に支承されたシャフト(1)のためにセンサ構造を提供するという課題を解決する。 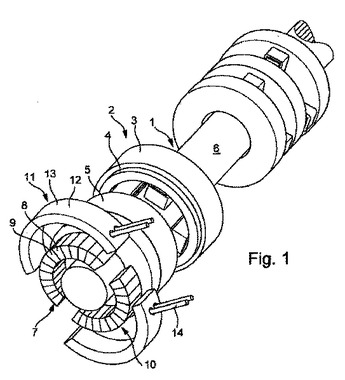 (もっと読む)
(もっと読む)
磁気式3次元位置検出装置
【課題】送信コイルと受信コイルとの距離が近くとも、従来に比して少ない計測値、校正用の磁界データによって受信コイルの位置や向きを高い精度にて推定することができる磁気式3次元位置検出装置を提供する。
【解決手段】本発明の磁気式3次元位置検出装置は、複数の送信コイルから相互に異なる周波数の交流磁界を生成し、受信コイルに誘導される受信信号を用い、受信コイルの3次元的な位置を計測する装置であり、送信コイルから生成される交流磁界に、送信コイルの大きさを考慮した磁気双極子モデルを用いた、磁界強度の空間パタンを表す磁界強度関数にて、受信コイルに誘導される磁界強度を求め、磁界強度関数から予測される信号強度と、受信コイルにて実際に計測される信号強度との誤差が最小となるように、受信コイルの3次元的な位置および向きを計算する手段とにより受信コイルの位置及び向きを計測する。
(もっと読む)
三次元画像生成装置及び三次元画像生成方法
【課題】安全で測定精度の良い三次元画像を生成する三次元画像生成装置を提供する。
【解決手段】この三次元画像生成装置110は、被検査対象物6に超音波を送信する送信部と被検査対象物6から反射した超音波を受信する受信部とを備えたプローブ1と、プローブ1の三次元位置情報及び姿勢情報を生成するセンサ2と、所定のエリアに磁界ベクトルを形成するトランスミッタ4と、三次元位置情報及び姿勢情報に基づいてプローブ1から取得された反射画像の三次元形状を演算するPC(演算部)12と、演算結果を三次元画像として表示するモニタ(表示部)14と、センサ2からの座標をリアルタイムに演算する位置検出回路10と、プローブ1から得られた反射画像データを処理するイメージプロセッサ11と、を備えて構成されている。
(もっと読む)
絶対変位検出方法及びその方法を用いた絶対変位センサ
【課題】 相対変位のポジティブフィードバックの困難な調整を必要とすることなしに極低周波数まで検出範囲を広げることができると共に絶対変位を安定して検出することができる絶対変位検出方法及びその方法を用いた絶対変位センサを提供すること。
【解決手段】 絶対変位センサ1は、被検出体としてのセンサハウジング2と、センサハウジング2にばね係数k及び減衰係数cをもって可動に支持された質量mを有した質量体3と、質量体3に対するセンサハウジング2の相対速度を電気的に検出する検出手段4と、相対変位をポジティブに、相対速度を一次微分して得られた相対加速度をネガティブに夫々フィードバックさせて、センサハウジング2の絶対変位に起因する質量体3の絶対変位を制御するフィードバック制御手段5と、相対変位に位相遅れ補償を施す位相遅れ補償手段6とを具備している。
(もっと読む)
電気式選択レバーモジュール
本発明は、自動車のオートマチックシフトトランスミッションのギアシフトシグナルを発生するための電気式選択レバーモジュールに関する。ギア選択レバーのメインシフトレーンP,R,N,D内での通常の旋回は、角度センサーのための回転動作に転換される。角度センサーは導体板上に配置されており、ローターによって非接触に作動させられる。ローターのガイドを、角度センサーに対して相対的に、可能な限り少ない部材、かつ可能な限り少ない公差でもって保証するために、ローター(9)は、導体板(5)の丸められた部分を取り囲むか、または導体板(5)に固定されえたローターガイドをフォーク状に取り囲む。シフトレーンの方向に対して横向きに行われるギア選択レバー(1)の動作(これはシフトゲートに応じて手動のギア選択のためのタップ動作であるかまたは第二のシフトレーン内へのレーンチェンジであり得る)は、本発明に従い、横動作を担当する第二の別のセンサー(7)が角度センサーであるように転換される。これに対応して、付随する横発振抑制要素(渦巻き流発振抑制要素)のためのキャリアもまた同様にある種のローターであり、このローターがここでは縦長のタップレバー(30)の形状で形成されており、回転可能に支承されている。ギア選択レバーの機械式の連結ポイントは、スライダー(13)の短いキャップであり、これら両方はシフトゲート動作のためのローター(9)に属しており、かつ回転可能に支承される横動作のためのタップレバー(30)を動かす。スライダーは、ローター(9)に対して相対的にレールの中を動き、これはローター(9)において直接放射方向に行われるか、ローターの回転中心に対して接線方向に(補助装置において)行われる。ローターは、スプリングシステムを使って導体板(5)に押さえつけられる。 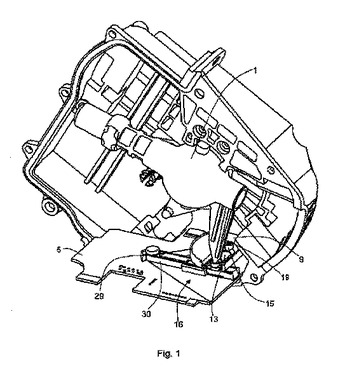 (もっと読む)
(もっと読む)
位置センサを備えた制御装置
本発明は、自動変速機を制御するための電子的な制御装置(1)であって、ハウジング内に制御回路(5)と、組み込まれたコネクタ(4)と、組み込まれた位置センサ(6)とが設けられており、該位置センサ(6)が、ステータとロータ(11)とを有している形式のものに関する。位置センサの製作品質を改善するためには、位置センサ(6)のステータが、ハウジングの材料によって定置に取り囲まれている。  (もっと読む)
(もっと読む)
多次元位置センサ
コントローラと、可動部と搬送経路とを有し前記コントローラと連通するワークピース搬送機と、前記可動部に固着した少なくとも1つの界生成プラテンと、搬送経路に沿って配置されコントローラと連通する少なくとも1つのセンサ群とを含み、前記界生成プラテンが位置計測とともに可動部を推進させるように構成される多次元測位装置とを備える装置であって、前記の少なくとも1つのセンサ群の各センサは、少なくとも1つの界生成プラテンで発生させる検知界内の単軸に沿ったばらつきに対応する1つのみの出力信号を提供するように構成され、前記コントローラは、前記の少なくとも1つのセンサ群の各センサに隣接した前記可動部の多次元位置を、前記の少なくとも1つのセンサ群内の少なくとも1つのセンサの前記1つのみの出力信号に基づいて、多次元位置には、少なくとも平面位置と、ワークピース搬送機と少なくとも1つの前記センサ群との間のギャップとを含めて算出するよう構成されている装置。 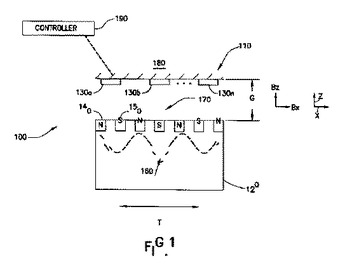 (もっと読む)
(もっと読む)
リニアセンサ
【課題】本発明は、第1コア体の両側に形成した各突出磁極に巻線を巻回し、第1コア体の両側に第2コア体の複数の突出磁極を対応させ、第1、第2チャンネルセンサを形成することを目的とする。
【解決手段】本発明によるリニアセンサは、両側に突出する複数の第1、第2突出磁極(2,2A)を有する第1コア体(1)と、前記第1コア体(1)に対応して配設された第2コア体(6)と、前記第2コア体(6)の各内壁(6a,6b)に形成され前記第1、第2突出磁極(2,2A)に対応する複数の第3、第4突出磁極(15,15A)とを備え、第1、第2突出磁極(2,15)側で第1チャンネルセンサ(20)を形成し、第2、第4突出磁極(2A,15A)側で第2チャンネルセンサ(30)を形成した構成である。
(もっと読む)
位置検出システムおよび位置検出方法
【課題】外部からの電力供給により交番磁界を発生する一のマーカと、該交番磁界の周波数と同一またはその近傍に共振周波数を有する共振回路を備えた他のマーカとがともに存在した場合であっても、一のマーカの位置または方向を正確に検出する。
【解決手段】外部からの電力供給により、所定の周波数だけ離れた一組の第1の位置算出用周波数を有する第1の交番磁界を発生する第1のマーカ4と、一組の第1の位置算出用周波数に挟まれた略中心の周波数を共振周波数とする磁気誘導コイル5を搭載した第2のマーカ3と、その作動範囲の外部に配置され、第1の位置算出用周波数において磁界を検出する磁界検出部13と、検出された磁界から一組の第1の位置算出用周波数を有する一組の第1の検出磁界成分の強度の加算値を抽出する抽出部30と、抽出された加算値に基づいて第1のマーカ4の位置および方向の少なくとも一方を算出する位置方向解析部22とを備える位置検出システム1を提供する。
(もっと読む)
位置検出装置および医療装置誘導システム
【課題】磁界検出部を検知体に近接して配置でき、装置の小型化、低コスト化を図りつつ、検知体の位置を精度よく検出する。
【解決手段】少なくとも1つの内蔵コイル3aを含む回路を備える検知体3が配置される検出空間Sに対し、少なくとも1つの磁界発生コイルを備え第1の磁界を発生させる第1の磁界発生部2と、発生された第1の磁界により内蔵コイル3aから発生される誘導磁界を検出するよう配列された複数の検出コイル4aを備える磁界検出部4と、第1の磁界発生部2により発生され検出コイル4aに入射する第1の磁界に対して略逆位相の磁界成分を有する少なくとも1つの磁界発生コイルを備え第2の磁界を発生させる第2の磁界発生部6とを備え、第1の磁界発生部2と検出コイル4aとが、第1の磁界の発生方向と、誘導磁界の検出方向とを交差させるように配置されている位置検出装置1を提供する。
(もっと読む)
給電線長測定装置及び無線通信装置
【課題】無線通信装置において、通信回路とアンテナとを接続するのに使用される給電線の長さを簡単に測定でき、しかも低コストで実現できる給電線長測定装置を提供する。
【解決手段】測定装置には、ダイプレクサ7及び通信装置の接続端子6を介して接続されるアンテナ4の給電線(同軸ケーブル3)を、共振器のコイルとして利用するコルピッツ発振回路50が設けられている。このコルピッツ発振回路50の発振周波数は、同軸ケーブルの長さに応じて変化し、同軸ケーブルが長いほど、周波数が低くなることから、コルピッツ発振回路50からの発振信号を、積分回路60及び整流回路70からなる周波数−電圧変換回路に入力して、発振信号の周波数を直流電圧信号に変換し、この直流電圧信号を、給電線の長さを表す信号として出力する。
(もっと読む)
地中位置検知方法
【課題】簡易な構造で、地上障害物に影響されることなく、掘削装置の地中位置を容易に検知することができる地中位置検知方法を提供する。
【解決手段】掘削装置1の地中位置を検知する地中位置検知方法において、掘削装置1に磁石2を設け、この磁石2を、掘削装置1の軸方向に伸びるy軸と直交するx軸およびz軸を含む平面上で回転させることで回転磁場を発生させ、少なくとも三つの測点P1,P2,P3で磁石2が発生させる回転磁場の磁束密度のx軸成分およびz軸成分をそれぞれ時刻暦として測定し、x軸成分およびz軸成分より各測点P1,P2,P3間の位相差をそれぞれ算出し、得られた位相差を、各測点を前記原点を含むxz平面にそれぞれ投影した各投影点から磁石2の位置を見込む見込み角度とみなし、この見込み角度より磁石2の位置のx座標およびz座標を算出し、他方、掘削装置1の掘削距離より磁石2の位置のy座標を算出する。
(もっと読む)
加工機内の駆動可能な胴用の回転角測定装置の構造および回転角測定のための方法
【課題】回転角測定装置に作用する悪影響を少なくとも明らかに低下させ、回転角測定装置による信号検出の精度をさらに高める。
【解決手段】胴1、胴2の少なくとも一つが、該胴に固定して配置された実量器12を備えること、および該実量器12に、回転角位置を誘導的に検出するスキャン装置13を非接触式に割り当てる。スキャン装置13、特にそのセンサ装置は、第2の胴2に対して、センサ装置の中心が、第2の胴2の位置変更可能な軸位置の領域の中心、たとえば第2の胴2の旋回領域の中心に対して一直線になるように配置する。
(もっと読む)
61 - 80 / 160
[ Back to top ]