
Fターム[2F065LL04]の内容
光学的手段による測長装置 (194,290) | 光学系 (17,149) | レンズ;レンズ系 (2,973)
Fターム[2F065LL04]の下位に属するFターム
変倍レンズ (254)
多焦点レンズ (8)
シリンドリカルレンズ (348)
ビームエキスパンダー (136)
その他の特殊レンズ (439)
Fターム[2F065LL04]に分類される特許
41 - 60 / 1,788
座標検出装置
【課題】 表示面における遮光物の座標位置を取得するまでの処理時間が短く、かつ表示面に接触した遮光物が検出光を遮光したことを適切に判断することができないことで発生する誤検出を防止することができる座標検出装置を提供する。
【解決手段】 座標検出装置10は、矩形状の表示面5を有する表示部5aと、複数の発光素子6aと、複数の受光素子6bと、座標位置検出部とを備える。表示面5は、第1側辺1aと、第2側辺2aと、第3側辺3aと、第4側辺4aとによって形成される。第1側辺1aと第2側辺2aとが接続された第1接続部1b、および第3側辺3aと第4側辺4aとが接続された第3接続部3bのそれぞれ近傍において発光素子6aが設けられている。
(もっと読む)
画像処理装置および画像処理プログラム

【課題】所望の計測部分の幾何的な物理量を選択的にかつ容易に取得することが可能な画像処理装置および画像処理プログラムを提供する。
【解決手段】対象物画像データに基づいて対象物画像OIが表示されるとともに、指定画像データに基づいて対象物画像の特定部分に対応する計測部分指定画像AIが表示される。使用者による操作部の操作により、表示される計測部分指定画像AIが対象物画像OIに相対的に移動される。計測部分指定画像AIが対象物画像OIの特定部分に移動された場合、その特定部分に対応するように予め設定された計測対象物の計測部分の物理量が計測される。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】画像の領域の大きさを使用者の操作精度によらず容易かつ均一に得ることが可能な画像処理装置および画像処理プログラムを提供する。
【解決手段】画像データに基づく初期画像IMにおいて抽出される領域A4が表示部260の画像表示領域261に表示される。表示された領域A4に外接する外接矩形Pが作成される。作成された外接矩形Pが表示部260の画像表示領域261に表示されるとともに、作成された外接矩形Pの予め定められた部分の寸法または面積を示す特徴量が算出される。使用者は、入力装置を用いて表示部260の画像表示領域261に表示された外接図形Pを回転させることができる。
(もっと読む)
検査装置及び方法
【課題】スポット溶接部の有無及び位置を精度良く計測することができる検査装置及び検査方法を提供する。
【解決手段】取得画像上のスポット溶接部を抽出する溶接部抽出部と、抽出したスポット溶接部の座標を算出する座標算出部9と、光線によって計測対象物上に指し示された3点以上の基準点を取得画像から抽出する基準点抽出部20と、抽出した取得画像上の基準点の座標を基に正対対象物に対する計測対象物の傾斜及び倍率のずれに起因する誤差を補正する補正値を算出する第1の補正値算出部21と、取得画像上の計測対象物の特徴量を抽出する特徴量抽出部22と、抽出した特徴量から計測対象物の蛇行及び撮像軸周りの回転に起因する誤差を補正する補正値を算出する第2の補正値算出部23と、補正値算出部21,23で算出した補正値によりスポット溶接部の座標を補正する座標補正部24とを備えている。
(もっと読む)
光学的位置検出装置
【課題】対象物体の2次元的な位置を1台の装置で光学的に検出することは困難であること。
【解決手段】光学的位置検出装置は、光を照射する光照射部と、対象物体からの反射光を受光する受光部とを有する。受光部は、受光面が2次元に分割された分割フォトダイオードと、対象物体からの反射光を集光し分割フォトダイオードの受光面に対象物体の像を結像する受光レンズと、分割フォトダイオードの分割された受光面の各々に対応するフォトダイオードの出力信号電流に基づいて、受光レンズの光軸と直交する2次元方向における対象物体の位置を検出する演算部とを有する。
(もっと読む)
コヒーレンス走査干渉計及び物体の高さ形状を空間解像可能に光学的に測定するための方法
【課題】コヒーレンス走査干渉計及びこのコヒーレンス走査干渉計を用いた物体の高さ形状測定するための方法に対して、測定精度や測定特性の再現性に関する改良を行なうことである。
【解決手段】光源2と、干渉計と、経路長変更ユニットと、検出面を有するカメラ3とが備えられている。経路長変更ユニットは、測定ビームと基準ビームの光路長を変更するように構成されている。経路長変更ユニットは、経路目盛11と経路検出器12とを有しており、経路目盛11と経路検出器12とは、経路長変更ユニットによる測定ビームの光路長変更または基準ビームの光路長変更あるいはその両方の光路長変更の際に、経路検出器12の同期的な動きが経路目盛11に対して相対的に行なわれるように構成されている。
(もっと読む)
形状計測装置、及び形状計測装置の調整方法
【課題】正確に調整可能な形状計測装置を提供する。
【解決手段】第1の光を発する第1の発光部11、及び第2の光を発する第2の発光部12と、第1の光及び第2の光を受ける格子3と、平坦な基板が配置されるステージ14と、格子3を透過した第1の光を第1の入射角で基板表面に入射させ、格子3を透過した第2の光を第2の入射角で基板表面に入射させる投影光学系5と、第1の光による基板表面の格子3の第1の変形像、及び第2の光による基板表面の格子3の第2の変形像に基づき、基板表面の高さ方向の位置を算出する高さ算出部と、基板表面の高さ方向の位置が投影光学系5の焦点位置と一致するよう、ステージ14を移動させる移動装置15と、を備える、形状計測装置。
(もっと読む)
状態検出装置
【課題】被測定対象物のレーザスペックル画像を得る装置において、被測定対象物の材質などに起因するスペックル画像の画質低下を可及的に抑制する。
【解決手段】被測定対象物(20)表面の観察領域(21)に向けてコヒーレント光を投光する投光部(10)と、被測定対象物表面の観察領域で拡散反射した上記コヒーレント光を受光する受光部(30)と、被測定対象物表面から受光部以外の方向に伝播するコヒーレント光を被測定対象物表面の観察領域に戻す反射部(41)と、受光部における受光状態に基づいて被測定対象物の状態を検出する検知部(50)と、を備える。
(もっと読む)
回折構造体、広帯域、偏光、エリプソメトリおよび下地構造の測定
【課題】高感度の分光散乱計を提供する。
【解決手段】半導体ウェハ上の回折構造体からの回折の前に、必要な場合は、分光反射率計または分光エリプソメータを使って構造体の下に位置する膜の膜厚と屈折率とをまず測定する。そして、厳密なモデルを使って回折構造体の強度またはエリプソメトリックな署名を計算する。次に、偏光放射線および広帯域放射線を用いた分光散乱計を使って回折構造体を測定して回折構造体の強度またはエリプソメトリックな署名を得る。この署名をデータベース内の署名と適合させて構造体の格子型パラメータを判定する。
(もっと読む)
計測装置
【課題】簡易な構成で広い計測レンジと高い計測精度とを実現した計測装置を提供する。
【解決手段】計測装置は、第1光源、第2光源、第1検出器、第2検出器及び算出部を備える。第1光源は第1波長と第2波長との間で波長が走査された走査区間を含む第1光を生成する。第2光源は第3波長の第2光を生成する。第1検出器は第1光を参照面及び被検面に各々照射することで生成された第1干渉縞を検出する。第2検出器は第2光を参照面及び被検面に各々照射することで生成された第2干渉縞を検出する。第3波長は第1波長及び第2波長の合成波長より短い。算出部は第1時刻において第2干渉縞の位相のデータから第2干渉縞の次数が算出できなくなった場合に、第1時刻より後の走査区間における第1干渉縞の位相の変化に基づいて第1時刻以降における第2干渉縞の次数を算出し、該算出された第2干渉縞の次数を用いて第1時刻以降における被検面の形状を算出する。
(もっと読む)
半導体ウェハの表面検査システム
【課題】より小型または簡単な構成で、より精度よく、半導体ウェハの表面に存在するソーマークの検出又は大きさの測定を行うことが可能な技術を提供する。
【解決手段】半導体ウェハWの表面に対して斜め方向から、入射面において平行光である光を照射し、ラインセンサカメラ3、4で半導体ウェハWの表面におけるライン状の領域3aを撮影する。このことで、半導体ウェハWの表面からの照射光の反射光または散乱光を検出し、この強度に基づいて、半導体ウェハWの表面における線状の凹凸を検出し、またはその大きさを測定する。光源装置1、2によって、ラインセンサカメラ3、4によって撮影されるライン状の領域3aのラインに平行な方向から光を照射し、線状の凹凸の方向がラインの方向に直交するように配置された状態で、半導体ウェハWの線状の凹凸を検出し、またはその大きさを測定する。
(もっと読む)
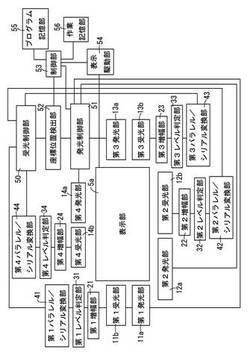
尖端バンプの高さ測定装置
【課題】 半導体チップの尖端バンプの高さを測定する。
【解決手段】 尖端バンプを含む複数の半導体チップが形成された半導体ウェハ21の上方に面照射装置33が配置されて、面照射装置33が半導体ウェハ21の上面に光を照射する。一対の撮像装置34,35が、半導体ウェハの斜め上方に配置されて、半導体ウェハ21上の尖端バンプを含む半導体チップを斜め上方から撮像する。コンピュータ36は、一対の撮像装置34,35によって撮像された一対の画像に基づいて尖端バンプの底から先端までの長さをそれぞれ検出して、前記検出した一対の長さと、一対の撮像装置34,35の光軸が半導体ウェハ21の上面となす角度を用いて尖端バンプの高さを計算する。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】画像から所望の領域を容易に抽出可能な画像処理装置および画像処理プログラムを提供する。
【解決手段】画像データに基づく初期画像IMが表示部260に表示される。使用者が初期画像IMにおいて抽出すべき領域を含む抽出範囲を指定することにより、抽出範囲内で設定された抽出条件に基づいて一または複数の領域が抽出される。抽出された一または複数の領域から、領域に関する特徴情報に基づいて特徴領域が選択される。選択された特徴領域が抽出領域として決定される。使用者が初期画像IMにおいて抽出すべき他の領域を含む抽出範囲を指定することにより、抽出範囲内で設定された抽出条件に基づいて一または複数の領域が抽出される。抽出された一または複数の領域から、領域に関する特徴情報に基づいて特徴領域が選択される。選択された特徴領域は、既に決定された抽出領域に加えられる。
(もっと読む)
監視装置、プログラム
【課題】ベッドを基準にして監視すべき領域を自動的に検出することにより、監視対象の人の動作を正確かつ再現性よく検出することを可能にした監視装置を提供する。
【解決手段】距離画像センサ10は、画素値が物体までの距離値である距離画像を生成する。距離画像センサ10の視野領域には、監視対象であるベッドの全体を含む。ベッド認識部21は、距離画像センサ10が出力した距離画像を用いてベッドの位置を抽出する。人認識部22は、距離画像センサ10が出力した距離画像のうちベッド認識部21により認識したベッドの範囲内と範囲外とにおいて人が占有する領域を検出する。行動判定部23は、ベッド認識部21により検出したベッドと人認識部22により検出した人の領域との組み合わせによりベッドに対する人の動作を判別する。
(もっと読む)
ガラス基板欠陥検査方法及びその装置並びにガラス基板欠陥検査システム
【課題】
表面の異物や傷欠陥だけでなく基板の局所的な厚さの変化による欠陥まで検出することを可能にする。
【解決手段】
ガラス基板検査装置を、ガラス基板を透過した光を検出する第1の欠陥検出光学系と、ガラス基板を透過した光によりガラス基板の表面又は内部で発生した散乱光を検出する第2の欠陥検出光学系と、第1の検出光学系で検出した信号と第2の検出光学系で検出した信号とを処理する信号処理手段とを備えて構成し、信号処理手段は、第1の検出光学系手段からの検出信号を入力して処理することによりガラス基板の局所的な厚さの変化に起因する欠陥を検出し、第2の検出光学系手段からの検出信号を入力して処理することによりガラス基板の欠陥を検出するように構成した。
(もっと読む)
描画装置およびその焦点調整方法
【課題】基板表面に対して光ビームを照射して描画する描画装置およびその焦点調整方法において、収束光学系の経時変化に対応することができ、しかも描画時の基板表面に収束光学系の焦点位置を適正に調整することのできる技術を提供する。
【解決手段】観察光学系80のダミー基板801と観察用カメラ803とを一体的に昇降可能とする。ダミー基板801の上面801aをステージ10上の基板Wの表面Sと略同一の高さに設定し、観察用カメラ803により観察されるダミー基板上面801aでの描画光学像が最も小さくなるように、光学ヘッド40aのフォーカシングレンズ431の位置を調整する。このときの光学ヘッド431とダミー基板上面801aとの距離を基準距離として、オートフォーカス部441,442によるオートフォーカス動作を実行する。
(もっと読む)
平面度測定方法
【課題】測定対象物の表面の平面度を精度良く求めることができる平面度測定方法を提供する。
【解決手段】平面度測定方法は、レーザ変位計を含むレーザ測定装置が、レーザ光を走査しながら、複数の位置における前記測定対象物の表面と測定基準面とする液面との間の、前記レーザ光の照射方向における距離の情報を測定して取り込む。この後、前記レーザ変位計が測定した複数の位置における前記距離の情報と、前記レーザ変位計が走査した前記複数の位置の位置情報をコンピュータが取り込む。前記コンピュータは、測定した前記位置それぞれにおける前記位置情報と前記距離の情報を座標として表した測定データを、座標空間上の点で表したとき、前記点すべてが2つの平行平面の間に挟まれ、かつ前記2つの平行平面の間の距離が最小となる目標平行平面を、前記2つの平行平面の傾きを変えながら探索することにより、前記平面度を算出する。
(もっと読む)
微小角変位測定方法と装置
【課題】簡単な構造で、数十ナノラジアン以下の微小角変位を測定可能な微小角変位測定方法と装置を提供する。
【解決手段】レーザ光源12と、レーザ光源12からのレーザ光Lを収束又は発散させるレンズ18と、レーザ光Lを分岐させる偏光ビームスプリッタ20と1/4波長板22を有する。測定対象面24で反射したレーザ光Lが、臨界角直前の角度で臨界面26aに入射する臨界角プリズム26を備える。臨界角プリズム26の臨界面26aで反射したレーザ光Lが入射する一方の画像センサ30と、臨界角プリズム26の臨界面26aを透過したレーザ光Lが入射する他方の画像センサ32とを備える。各画像センサ30,32の各画素の出力を基に、測定対象面24の微小角変位を演算する微小角変位演算手段であるコンピュータ34を備える。臨界角プリズム26に入射するレーザ光Lを分割するビームスプリッタを設けても良い。
(もっと読む)
板状体の検出装置とケースポート及び保管装置
【課題】 板状体の正面を塞がずに、かつ光源と受光素子とを備えている投受光センサを用いて、板状体を確実に検出する。
【構成】 検出装置は板状体が所定位置に存在するか否かを検出する。検出装置は、板状体の一側面へ向けて斜めにスポット状の検出光を投光する光源と反射光を受光する受光素子とを備えている投受光センサと、投受光センサから見て板状体よりも遠方にあり、かつ板状体が存在しない場合、検出光を拡散反射する拡散反射部と、投受光センサへ入射する反射光の所定の強度以下であることから、板状体を検出する検出部、とを備えている。板状体の側面が透明の場合、板状体の側面へ入射した検出光は板状体の内部で複数回反射し投受光センサとは異なる方向へ出射し、板状体の側面が鏡面状の反射面の場合、板状体の側面へ検出光は斜めに入射して投受光センサとは異なる方向へ正反射する。
(もっと読む)
対象物識別方法と装置
【課題】対象物が太陽に直接照らされていても、対象物が遠くに位置していても、対象物を撮像して得た画像において、対象物の位置を識別できるようにする。
【解決手段】第1の波長域の光を吸収し、かつ、第2の波長域の光を反射する光学特性部3を、対象物1に取り付ける。第1の波長域の光を第1撮像部5aに入射させ、かつ、第2の波長域の光を、第1撮像部以外の位置へ反らし、または、吸収する第1光学系6と、第2の波長域の光を第2撮像部5bに入射させる第2光学系8と、を用意する。第1撮像部5aにより、第1光学系6を介して、対象物1を含む領域を撮像して第1画像を生成するとともに、第2撮像部5bにより、第2光学系8を介して、対象物1を含む領域を撮像して第2画像を生成する。第1画像の各画素の輝度Aと、対応する第2画像の画素の輝度Bとの比率B/Aを求め、この比率に基づいて、光学特性部3の位置を特定する。
(もっと読む)
41 - 60 / 1,788
[ Back to top ]