
Fターム[2F065LL04]の内容
光学的手段による測長装置 (194,290) | 光学系 (17,149) | レンズ;レンズ系 (2,973)
Fターム[2F065LL04]の下位に属するFターム
変倍レンズ (254)
多焦点レンズ (8)
シリンドリカルレンズ (348)
ビームエキスパンダー (136)
その他の特殊レンズ (439)
Fターム[2F065LL04]に分類される特許
81 - 100 / 1,788
プロキシミティ露光装置、プロキシミティ露光装置のギャップ制御方法、及び表示用パネル基板の製造方法
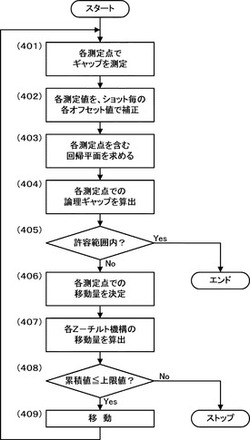
【課題】基板の一面を複数のショットに分けて露光する際、ショット毎に、マスクと基板とがより平行な状態でギャップ合わせを行って、露光精度を向上させる。
【解決手段】マスクホルダ20とチャック10とを相対的にZ方向へ移動及びチルトする複数のZ−チルト機構30と、マスク2と基板1とのギャップを複数箇所で測定する複数のギャップセンサー30とを設ける。予め露光した基板のパターンを測定して、各ギャップセンサー40の測定点におけるショット毎のオフセット値を決める。ショット毎に、各ギャップセンサー40の測定値を、各測定点におけるショット毎のオフセット値で補正し、補正後の補正値に基づいて、複数のZ−チルト機構30によりマスク2と基板1とのギャップ合わせを行う。
(もっと読む)
距離測定装置及び軌道周辺支障物検出装置

【課題】太陽光などの投光波長以外の光を極限まで制限して、投光波長のみを受光できるようにする。
【解決手段】干渉膜を使った平面板の干渉フィルタを用いて広い視野の検出手段を構成すると、平面板の干渉フィルタへの入射角に応じて透過帯域の移動が起こり、所望の信号強度を得ることが困難となる。この発明は、干渉フィルタの形状を球面状にして全視野の受光光線を干渉フィルタの入射面に対して垂直に入射するようにして、透過帯の移動をなくし、所望の信号強度を得るようにした。また、受光レンズの第一主点と球面状干渉フィルタの球面中心とを一致させて配置することにより、干渉フィルタへ入射する反射光の入射角を0°にして透過帯域が変化しないようにした。
(もっと読む)
エリプソメータ
【課題】真空雰囲気中で測定対象物を精度良く測定でき、光ファイバを着脱しても、測定精度に影響の無いエリプソメータを提供する。
【構成】投光部13と受光部14を筺体11の内部に配置し、発光装置12を筺体11の外部に配置し、光配線装置18によって、発光装置12と投光部13とを光接続する。投光部13は入射光を偏光して測定光を生成し、測定対象物7に照射し、反射光を受光部14によって受光して筺体11の外部に配置された分析装置15へ送光すると、分析装置15で膜厚が求められる。測定対象物7を真空雰囲気中で測定でき、光配線装置18と投光部13とを着脱しても、相対的に同じ位置で仮固定され、着脱が測定精度に影響を与えない。
(もっと読む)
圧着端子検査装置および圧着端子検査方法
【課題】検査作業者の技量にかかわらず、圧着端子を精度よく検査できる、圧着端子検査装置および圧着端子検査方法を提供する。
【解決手段】圧着端子3の検査時には、検査作業者により、圧着端子検査装置1の端子配置部に圧着端子3が配置されて、圧着端子3が延伸方向に延びる軸線を中心に揺動される。この揺動中に、ハイト測定用エリアイメージセンサ14の撮像面141への圧着端子3の投影における第1測定位置Piおよび第2測定位置PwでのY軸方向寸法Yi,Ywが測定される。そして、Y軸方向寸法Ywの極小値Ywminが圧着端子3のワイヤバレル部32のクリンプハイトHwとして取得される。
(もっと読む)
撮像装置
【課題】 被写体をステレオ撮影時にズーム調整が可能であり、撮影したステレオ画像から被写体の3次元位置情報を高精度で取得できる撮像装置を実現する。
【解決手段】 被写体を第1の方向から撮像する第1の撮像手段と、被写体を第1の方向とは異なる第2の方向から撮像する第2の撮像手段とを備え、第1の撮像手段により撮像された第1の画像と、第2の撮像手段により撮像された第2の画像を用いて、被写体の3次元位置情報を取得する撮像装置であって、撮像装置は、第1の画像および第2の画像をズーム調整して結像させるズーム光学系を有し、ズーム光学系は、焦点距離を検出する焦点距離検出手段を有することを特徴とする。
(もっと読む)
表面形状測定方法および装置
【課題】 表面形状測定において、測定対象面と参照面からの反射光により干渉縞を発生させ、各画素の位相を単色光ごとに求め、表面形状を測定において、波長の異なる複数の単色光を得る場合は、抽出手段を増設する必要が生じていた。
【解決手段】 照射手段を介して測定対象面と参照面に波長の異なる複数の単色光を照射し、測定対象面と参照面の両方から反射して同一光路を戻る反射光によって生じる干渉縞の強度値に基づいて、測定対象面の表面高さと表面形状を求める表面形状測定方法において、前記照射手段が、広帯域な波長特性を有する照射光から、音響光学フィルタを用いて任意の異なる波長の単色光を複数抽出し、同時に混在して照射する照射手段を用いる。
(もっと読む)
形状計測方法、形状計測装置、プログラム及び記録媒体
【課題】被検物の裏面からの不要反射光の影響を除去して、被検物の被検面の形状を高精度に計測すること。
【解決手段】記憶制御部161は、理想被検面での反射による第1の基準反射光スポットの位置及び光量分布をHDD133に記憶させる。更に、記憶制御部161は、理想裏面での反射による第2の基準反射光スポットの位置及び光量分布をHDD133に記憶させる。取得部162は、被検面からの第1の反射光スポット及び裏面からの第2の反射光スポットを含む画像データをカメラ110から取得する。フィッティング部165は、HDD133に記憶された第1及び第2の基準反射光スポットの光量分布を合成させる。フィッティング部165は、その合成光の光量分布が、実際の合成光の光量分布と一致するように、第1及び第2の基準反射光スポットをフィッティングさせる。計算部166は、フィッティング結果に基づいて被検面の形状を計算する。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、デバイス製造方法、並びに計測方法
【課題】計測対象面の凹凸に起因する面位置センサの計測誤差の補正データを作成し、該補正データを用いて計測精度が改善される面位置センサを用いて、移動体を高精度に2次元駆動する。
【解決手段】 X干渉計127、Y干渉計16を用いて位置を監視しながらウエハステージWSTを移動させ、センサ72a〜72dを用いてウエハステージ上面に設けられたYスケール39Y1,39Y2のZ位置を計測する。ここで、例えば、2つの面位置センサ72a,72bの計測結果の差より、Yスケール39Y2のY軸方向の傾きが得られる。Yスケール39Y1,39Y2の全面について傾きを計測することにより、それらの2次元凹凸データが作成される。この凹凸データを用いてセンサの計測結果を補正し、該補正済みの計測結果を用いることにより、高精度にウエハステージを2次元駆動することが可能になる。
(もっと読む)
基板検査装置
【課題】検査精度の向上を図ることのできる基板検査装置を提供する。
【解決手段】基板検査装置は、実装エリア内のクリームハンダ4及びレジスト膜5の表面の三次元計測を行うと共に、各クリームハンダ4の最高点の位置情報を基に算出した所定の平面を第1仮想基準面K1として設定し、さらに当該第1仮想基準面K1をベース基板2の表面2aに直交する方向に沿って所定位置まで降下させ、第2仮想基準面K2として設定する。そして、当該第2仮想基準面K2からの各クリームハンダ4の突出量を算出し、これを基に当該クリームハンダ4の印刷状態の良否を判定する。
(もっと読む)
形状計測装置、横座標校正方法及び光学素子の製造方法
【課題】汎用性の高い横座標の校正方法によって横座標を校正する形状計測装置、及びその横座標校正方法を提供する。
【解決手段】複数の開口が形成され、これら複数の開口の配列によって校正パターンを形成するアパーチャー板20をワークWの被検面Wsの前面に配置する。この開口を通過すると共に、被検面Wsで反射され、再度開口を通過した測定光Lmを撮像素子5によって検出する。撮像素子上にて結像した校正パターンの横座標位置と、予め計測されている校正パターンの基準横座標位置とを、演算装置7によって比較することによって、形状計測装置1の横座標を校正する。
(もっと読む)
金属試料を測定する膨張計
【課題】温度に依存する長さの変化を正確に測定することができる膨張計を提供する。
【解決手段】試料3を固定することのできる試料ホルダ4、14と、試料3を加熱するために試料3に配置される少なくとも1つの誘導コイル5と、試料3の温度を測定する少なくとも1つのセンサとを備える、金属試料3を測定する膨張計1であって、試料3の長さの変化を検出する光学測定装置6、9が備えられている。これにより、温度に依存する、試料の長さの変化を正確に測定することができる。
(もっと読む)
高さ計測装置及び方法
【課題】被計測物が様々な屈折率で、かつ様々な厚さの透明媒質の下に配置されていても、その被計測物の高さを容易に計測する。
【解決手段】高さ計測装置1は、照明光から分岐された第1照明光を被計測物6に導く対物レンズ24と、照明光から分岐された第2照明光を参照ミラー28に導く対物レンズ26と、第2照明光の光路長を調整する移動部36と、被計測物6及び参照ミラー28で反射される2つの照明光の干渉像を撮像する高速度カメラ12と、対物レンズ24と被計測物6とを光軸方向に相対移動するピエゾ駆動装置18と、を備える。
(もっと読む)
接合継ぎ目を監視する光学測定装置、ならびに同測定装置を備える接合ヘッド及びレーザ溶接ヘッド
【課題】ワークピース内の接合領域を監視する光学測定装置を提供する。
【解決手段】光学測定装置100は、接合対象であるワークピース16の方向に光扇22を投射して、前記接合対象であるワークピースの接合領域10内に、その接合領域内の接合継ぎ目14と交差する三角測量光ライン24を生成するのに適した第1光源20を備える少なくとも一つの光切断装置18と、前記接合対象であるワークピースの接合領域を均一に照光する第2光源28を備える照光装置26と、接合継ぎ目上に投影された三角測量光ラインの空間分解画像を生成する、第1測定ビーム経路32を有する第1光センサ30と、接合継ぎ目の空間分解画像を生成する、第2測定ビーム経路36を有する第2光センサ34とを含み、第2測定ビーム経路は、第1測定ビーム経路内に同軸結合され、第1光センサの読み取り速度は1kHzを上回り、第2光センサの読み取り速度は500Hz未満である。
(もっと読む)
光学式測定装置、プレス機、部品組合せ方法
【課題】小型化可能で高精度な形状測定が可能な光学式測定装置を提供する。
【解決手段】レーザ光源201が出力したビーム状の測定用光216は第2円錐ミラー207によって放射状の測定用光に変換され、ケース101の第2開口部102を通って出力された後、測定対象物220で反射され、第1開口部103を通ってケース101内へ入り、第1円錐ミラー209によって反射された後、受光レンズ213を介して光検出素子214で検出される。処理部240は、光検出素子214で検出された測定用光に基づいて測定対象物の形状を算出する。
(もっと読む)
3次元測定装置、3次元測定方法及びプログラム
【課題】測定対象物が明るさ(色)の異なる複数の領域を有している場合に、適切にその測定対象物を3次元測定することができる3次元測定装置等の技術を提供すること。
【解決手段】本技術の一形態に係る3次元測定装置は、投影部と、撮像部と、制御部とを具備する。前記投影部は、照度を変化可能な照明を有し、前記照明からの光により測定対象物に縞を投影する。前記制御部は、前記撮像部により前記測定対象物の画像を撮像させ、撮像された前記測定対象物の画像から輝度値を取得し、取得された前記輝度値に基づいて、前記測定対象物に対して複数の検査ブロックを割り当て、割り当てられた前記検査ブロック毎に、前記照明の測定照度を決定し、決定された前記測定照度で、それぞれ、前記投影部により前記検査ブロックに対して縞を投影し、前記縞が投影された前記検査ブロックの縞画像を前記撮像部により撮像し、撮像された前記縞画像に基づいて前記測定対象物を3次元測定する。
(もっと読む)
検査装置、リソグラフィ装置、リソグラフィプロセシングセルおよび検査方法
【課題】回折次数の重なりを防止しつつ基板の特性を精度良く求める技術を提供する。
【解決手段】角度分解分光法に対しては、4つのクアドラントを有する照明プロファイルを有する放射ビームが使用される。第1および第3クアドラントが照明される一方、第2および第4クアドラントは照明されない。したがって、結果として生じる瞳面は4つのクアドラントに分けられ、ゼロ次回折パターンのみが第1および第3クアドラントに現れて一次回折パターンのみが第2および第3クアドラントに現れる。
(もっと読む)
膜厚測定装置
【課題】本発明は、被測定物との距離に依存することなく、被測定物の膜厚を高い精度を測定することが可能な膜厚測定装置を提供する。
【解決手段】本発明は、光源10と、第1光路と、第1集光レンズと、分光測定部40と、第2光路と、第2集光レンズと、データ処理部50を備える膜厚測定装置100である。光源は、所定の波長範囲をもつ測定光を照射する。第1光路は、光源10から照射した測定光を被測定物に導く。第1集光レンズは、第1光路から出射する測定光を被測定物に集光する。分光測定部40は、反射率または透過率の波長分布特性を取得する。第2光路は、被測定物で反射された光または被測定物を透過した光を、分光測定部に導く。第2集光レンズは、第2光路の端部に集光する。データ処理部50は、分光測定部40で取得した波長分布特性を解析することで、被測定物の膜厚を求める。
(もっと読む)
ヘテロダインレーザー干渉測長器
【課題】測長結果から精度よくデッドパスの影響を排除するヘテロダインレーザー干渉測長器を提供する。
【解決手段】ヘテロダインレーザー光源10からのビームを分岐させて測定ビームB1と参照ビームB2を生成する分岐器80と、測定ビームB1及び参照ビームB2を分割する偏光ビームスプリッタ30と、測定光路LP1,LP2に設けられる1/4波長板31,32と、可動測定物50に固定され、測定ビームB11,B12が照射される測定ミラー341,342と、測定ミラー341,342近傍に配置され、参照ビームB21,B22が照射される反射ミラー411,412と、測定ミラー341,342の反射光を干渉させた光と反射ミラー411,412の反射光を干渉させた光に基づく2つのビート信号から変位を算出する演算回路70を備え、分機器80は測定ビームB1と参照ビームB2の光量比を連続的に変化させて調整する調整手段を有する。
(もっと読む)
画像計測装置及びコンピュータプログラム
【課題】計測結果が計測対象物のどの部分のどの計測結果であるのかを使用者が的確に把握することができる画像計測装置及びコンピュータプログラムを提供する。
【解決手段】撮像手段で取得した計測対象物の画像を表示し、表示された画像上で特徴画像、及び計測位置の指定を受け付ける。指定を受け付けた特徴画像と、計測位置及び該計測位置を示す寸法線の表示位置を表す、特徴画像に対する相対位置に関する情報とを記憶しておく。新たに取得した計測対象物の画像と記憶してある特徴画像とを照合し、計測対象物の画像の姿勢及び位置に関する情報を特定する。姿勢及び位置が特定された計測対象物の画像に対して計測位置を設定し、該計測位置のエッジ部分を検出して、所定の物理量を計測する。記憶された寸法線を表示する特徴画像に対する相対位置に関する情報に基づいて、計測位置を示す寸法線及び計測結果を所定の位置に表示する。
(もっと読む)
車軸検出装置
【課題】車軸検出装置における車軸の検出精度を向上させる。
【解決手段】車両進行方向に対して垂直方向に被写体に対して赤外線を照射する赤外線照射部(101a〜101d)と、前記被写体からの反射光をそれぞれ受光して被写体像を取得する画像取得部(104a、104b)と、取得された複数の被写体像に基づいて、前記被写体までの距離を演算する距離演算部(107)と、被写体に車両が含まれない場合の該被写体までの距離を記憶する距離データ記憶部(109)と、演算された前記被写体までの距離と記憶された距離との比較結果に基づいて車軸を検出する車軸判別部(110)と、を具備し、距離データ記憶部(109)は、前記被写体に車両が含まれない場合で演算された前記被写体までの距離の信頼性が所定条件を満足する場合、前記演算された距離に記憶内容を更新する。
(もっと読む)
81 - 100 / 1,788
[ Back to top ]