
地図表示装置
【課題】より正確な位置に現在位置を補正できるようにする。
【解決手段】走行道路上の基準点Aからの走行距離を算出し、この基準点Aからの走行距離に応じた走行道路上の地点に現在位置を補正し、補正された現在位置を地図上に表示する地図表示装置において、地図データに規定されている道路の長さを表す距離情報は、実際の道路を計測して求めた実距離、すなわち道路面に沿った距離を用いて規定されたものとなっている。
【解決手段】走行道路上の基準点Aからの走行距離を算出し、この基準点Aからの走行距離に応じた走行道路上の地点に現在位置を補正し、補正された現在位置を地図上に表示する地図表示装置において、地図データに規定されている道路の長さを表す距離情報は、実際の道路を計測して求めた実距離、すなわち道路面に沿った距離を用いて規定されたものとなっている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、現在位置を地図上に表示する地図表示装置に関する。
【背景技術】
【0002】
従来、地図データから所定の範囲内における道路を選択し、車両の位置と選択された道路との最短距離を求めてその整合性(距離整合性)を判断し、車両の進行方向と選択された道路のリンク方向とを比較してその整合性(方向整合性)を判断し、車両の姿勢角と道路勾配とを比較してその整合性(角度整合性)を判断し、上記3つの整合性を満たす道路の中から補正の対象となる道路を決定し、この決定された補正の対象となる道路上に、測位した車両の位置を補正して地図表示を行うナビゲーション装置がある(例えば、特許文献1参照)。
【特許文献1】特開平9−159473号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上記特許文献1に記載されたようなナビゲーション装置では、道路の形状や道路の長さを表す距離情報を規定した地図データを用いて道路上の地点に現在位置を補正するようになっている。しかし、このような地図データに規定されている道路の距離情報は、実際の道路を計測して求められた値ではなく、平面地図から求めた値を用いて規定されている。
【0004】
このため、地図データから走行道路を選択し、自車の走行に伴って収集した走行距離を特定するための情報を用いて選択された走行道路上の基準点からの走行距離を算出し、この基準点からの走行距離に応じた走行道路上の地点に現在位置を補正する際に、算出した走行距離と地図データの道路形状にずれが生じ、道路区間上の正確な位置に現在位置を補正するのが困難になるといった問題がある。
【0005】
特に、起伏の激しい道路では、地図データに規定された道路長と実際の道路長との差が大きくなるため、算出した現在位置と地図データから読み出した道路形状のずれも大きくなり、道路区間上の正確な位置に現在位置を補正するのがより困難になるといった問題がある。
【0006】
本発明は上記問題に鑑みたもので、より正確な位置に現在位置を補正できるようにすることを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、請求項1に記載の発明は、移動距離を特定するための情報を収集する移動距離情報収集手段と、道路の形状および道路の長さを表す距離情報を規定した地図データを記憶媒体から読み出す読出手段と、読出手段により読み出された地図データから移動中の道路を選択し、移動距離情報収集手段により収集された移動距離を特定するための情報を用いて選択された移動中の道路上の基準点からの走行距離を算出し、この基準点からの移動距離に応じた移動中の道路上の地点に現在位置を補正する現在位置補正手段と、現在位置補正手段により補正された現在位置を地図上に表示する表示手段と、を備えた地図表示装置であって、地図データに規定されている道路の長さを表す距離情報は、実際の道路を計測して求めた実距離を用いて規定されたものであることを特徴としている。
【0008】
このような構成では、実際の道路を計測して求めた実距離を用いて地図データの道路の長さを表す距離情報が規定されているので、地図データから移動中の道路を選択し、この選択された移動中の道路上の基準点からの移動距離を算出し、この基準点からの移動距離に応じた移動中の道路上の地点に現在位置を補正する際に、算出した移動距離と地図データから読み出した道路形状のずれが生じにくく、より正確な位置に現在位置を補正することができる。
【発明を実施するための最良の形態】
【0009】
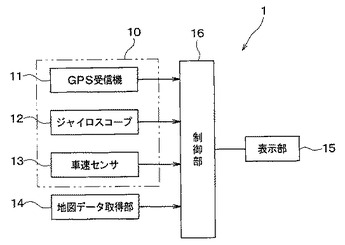
本発明の一実施形態に係る地図表示装置の構成を図1に示す。本地図表示装置は、ナビゲーション装置1として構成されている。本ナビゲーション装置1は、位置検出器10、地図データ取得部14、表示部15および制御部16を備えている。
【0010】
位置検出器10は、いずれも周知のGPS受信機11、ジャイロスコープ12、車速センサ13を有しており、これらのセンサから車両の現在位置および向きを特定するための情報が制御部16に入力される。また、車速センサ13から車速に応じた車速信号が制御部16に入力される。制御部16は、この車速信号から走行距離を求めることが可能となっている。
【0011】
地図データ取得部14は、地図データが記憶された記憶媒体から地図データを読み出すための装置である。本実施形態では、地図データを記憶したハードディスクドライブによって構成されている。
【0012】
地図データは、複数の交差点のそれぞれに対応するノードデータと、交差点と交差点を結ぶ道路区間すなわちリンクのそれぞれに対応するリンクデータと、川、湖、海、道路、鉄道、施設などの位置、形状、名称を表す背景データと、各地の施設の名称、所在位置、施設種類等を示す施設データとを有している。
【0013】
ノードデータには、当該ノードの識別番号、所在位置情報、種別情報が含まれており、リンクデータには、当該リンクの識別番号、距離情報(リンク長)、位置情報、種別情報等が含まれている。
【0014】
ここで、リンクの位置情報には、当該リンクが含む形状補完点の所在位置データ、および、当該リンクの両端のノードおよび形状補完点のうち隣り合う2つを繋ぐセグメントのデータが含まれている。各セグメントのデータは、当該セグメントの識別番号、当該セグメントの距離情報(セグメント長)等の情報を有している。
【0015】
表示部15は、液晶等のディスプレイを有し、制御部16から入力される映像信号に応じた映像をディスプレイに表示させる。
【0016】
制御部16は、CPU、メモリ、I/O等を備えたコンピュータとして構成されており、CPUはメモリに記憶されたプログラムに従って各種処理を実施する。
【0017】
制御部16の処理としては、位置検出器10から入力される情報に基づいて車両の現在位置と向きを算出する現在位置算出処理、車速センサ13から入力される車速信号に基づいて走行距離を算出する走行距離算出処理、現在位置算出処理により算出された車両の現在位置と向きおよび走行距離算出処理により算出された走行距離に基づいて走行軌跡を収集する走行軌跡収集処理、車両の現在位置周辺の地図上に現在位置マークを重ねて表示する地図表示処理、ユーザ操作に応じて目的地を検索する目的地検索処理、出発地から目的地に至る案内経路を探索する経路探索処理、案内経路に従って経路案内を行う経路案内処理等がある。
【0018】
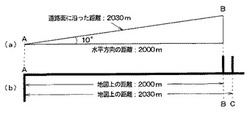
本ナビゲーション装置1の地図データは、道路の長さを表す距離情報(リンク長、セグメント長等)が、実際の道路を計測して求めた実距離を用いて規定されたものとなっている。例えば、図2(a)に示すような、勾配が10%の道路では、A点とB点間の水平方向の距離(2000メートル)としてではなく、道路面に沿って計測した実距離(2030メートル)を用いて規定されたものとなっている。
【0019】
図2(a)に示されるように、A点を基準点として走行距離を算出すると、基準点から2030メートルの地点でB点に到達することになる。
【0020】
従来のナビゲーション装置で用いられている地図データは、A点とB点間の水平方向の距離(2030メートル)を用いてA点とB点間の距離が規定されているため、A点から2030メートルの地点をB点として現在位置を表示させようとすると、図2(b)に示すC点の位置(A点からの走行距離が2030メートルの地点)に現在位置がずれて表示されてしまうことになる。
【0021】
また、例えば、B点が経路探索により探索された案内経路における右折案内交差点となっているような場合、実際には自車はB点の手前に位置していても、制御部16により自車がB点を直進したものと判定され、自車が案内経路から外れたものと判定されてしまうといったことも考えられる。
【0022】
本実施形態におけるナビゲーション装置1で用いられている地図データは、道路面に沿って計測した実距離(2030メートル)を用いて道路の長さを表す距離情報が規定されているので、A点から2030メートルの地点をB点として現在位置を表示させる場合、図2(b)に示すB点の位置に現在位置が表示され、現在位置のずれはなくなる。また、上記したようにB点が右折案内交差点となっていても、自車がB点を直進したものと誤って判定されてしまうようなことをなくすことも可能である。
【0023】
このように実際の道路を計測して求めた実距離を用いて地図データの道路の長さを表す距離情報を規定することで、より正確な位置に現在位置を補正することが可能となっている。
【0024】
本ナビゲーション装置1の制御部16は、地図表示処理の際に、地図データから走行道路を選択し、自車の走行に伴って収集した走行軌跡と選択された走行道路とを照合して走行道路上の地点に現在位置を補正するマップマッチング処理を行う。
【0025】
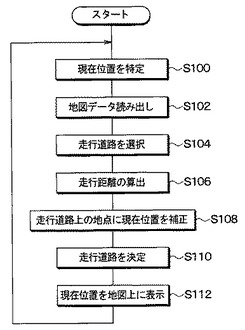
次に、図3に従って、このマップマッチング処理について説明する。ユーザの操作に応じてイグニッションスイッチがオンすると、本ナビゲーション装置1は動作状態となり、制御部16は、上記した現在位置算出処理、走行距離算出処理等とともにこのマップマッチング処理を開始する。
【0026】
まず、車両の現在位置を特定する(S100)。この車両の現在位置は、現在位置算出処理により特定される。
【0027】
次に、地図データの読み出しを行う(S102)。具体的には、地図データ取得部14より自車位置周辺の地図データの読み出しを行う。
【0028】
次に、走行道路を選択する(S104)。ここでいう走行道路は、自車が走行している可能性のある道路を意味する。したがって、自車が走行している可能性のある道路が複数ある場合には、複数の走行道路を選択する。
【0029】
次に、走行距離の算出を行う(S106)。具体的には、車速センサ13から入力される車速信号を用いて走行道路上の基準点からの走行距離を算出する。なお、複数の走行道路が選択されている場合には、選択されている各走行道路について走行距離の算出を行う。
【0030】
次に、走行道路上の地点に現在位置を補正する(S108)。具体的には、S106にて算出された走行道路上の基準点からの走行距離に応じた走行道路上の地点に現在位置を補正する。なお、現在位置を補正する際には、ジャイロスコープ12から入力される情報に基づく自車の向きについても考慮される。ここでも、複数の走行道路が選択されている場合には、選択されている各走行道路について現在位置の補正を行う。
【0031】
次に、走行道路を決定する(S110)。このステップは、複数の走行道路が選択されている場合に実施されるもので、走行軌跡収集処理によって収集された走行軌跡と選択された各走行道路とを照合して最も確からしい走行道路を決定する。
【0032】
次に、現在位置を地図上に表示する(S112)。具体的には、先のS110にて決定された最も確からしい走行道路上の地点に現在位置を補正した地図を表示する。なお、先のS110にて確からしい走行道路が存在しない場合には、道路上の地点に現在位置を補正することなく、現在位置算出処理により特定された現在位置を地図上に表示させる。
【0033】
上記した処理を繰り返し実施し、最新の現在位置が道路上の地点に補正され地図上に表示される。
【0034】
上記した構成によれば、実際の道路を計測して求めた実距離を用いて地図データの道路の長さを表す距離情報が規定されているので、地図データから走行道路を選択し、この選択された走行道路上の基準点からの走行距離を算出し、この基準点からの走行距離に応じた走行道路上の地点に現在位置を補正する際に、算出した走行距離と地図データから読み出した道路形状のずれが生じにくく、より正確な位置に現在位置を補正することができる。また、より正確な位置に現在位置を補正することができるため、いわゆるマップマッチング外れの発生する頻度を低減することも可能である。
【0035】
なお、本発明は上記実施形態に限定されるものではなく、本発明の趣旨に基づいて種々なる形態で実施することができる。
【0036】
例えば、上記実施形態では、ハードディスクドライブから地図データを読み出す構成を示したが、例えば、DC、DVD等の記憶媒体に記憶された地図データの読み出しを行う読み取り装置を用いて地図データを読み出す構成としてもよく、また、地図データを配信する情報センタに配置された地図データ配信装置から通信により地図データを読み出す構成としてもよい。
【0037】
また、上記実施形態では、車速センサ13から入力される車速信号を用いて移動距離を算出する例を示したが、車速センサ13に限定されることなく、例えば、GPS受信機から入力される信号を用いて移動距離を算出するようにしてもよい。
【0038】
また、上記実施形態では、ナビゲーション装置を例に地図表示装置について説明したが、ナビゲーション装置に限定されるものではなく、例えば、地図表示機能を備えた携帯電話、携帯情報端末等に適用してもよい。
【0039】
なお、上記実施形態における構成と特許請求の範囲の構成との対応関係について説明すると、車速センサ13が移動距離情報収集手段に相当し、地図データ取得部14が読出手段に相当し、S104、S106、S108が現在位置補正手段に相当し、S112が表示手段に相当する。
【図面の簡単な説明】
【0040】
【図1】本発明の一実施形態に係る地図表示装置の構成を示す図である。
【図2】A点からの走行距離を算出して、A点からの走行距離に応じた道路上の地点に現在位置を表示させる処理について説明するための図である。
【図3】マップマッチング処理のフローチャートである。
【符号の説明】
【0041】
1…ナビゲーション装置、10…位置検出器、11…GPS受信機、
12…ジャイロスコープ、13…車速センサ、14…地図データ取得部、
15…表示部、16…制御部。
【技術分野】
【0001】
本発明は、現在位置を地図上に表示する地図表示装置に関する。
【背景技術】
【0002】
従来、地図データから所定の範囲内における道路を選択し、車両の位置と選択された道路との最短距離を求めてその整合性(距離整合性)を判断し、車両の進行方向と選択された道路のリンク方向とを比較してその整合性(方向整合性)を判断し、車両の姿勢角と道路勾配とを比較してその整合性(角度整合性)を判断し、上記3つの整合性を満たす道路の中から補正の対象となる道路を決定し、この決定された補正の対象となる道路上に、測位した車両の位置を補正して地図表示を行うナビゲーション装置がある(例えば、特許文献1参照)。
【特許文献1】特開平9−159473号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上記特許文献1に記載されたようなナビゲーション装置では、道路の形状や道路の長さを表す距離情報を規定した地図データを用いて道路上の地点に現在位置を補正するようになっている。しかし、このような地図データに規定されている道路の距離情報は、実際の道路を計測して求められた値ではなく、平面地図から求めた値を用いて規定されている。
【0004】
このため、地図データから走行道路を選択し、自車の走行に伴って収集した走行距離を特定するための情報を用いて選択された走行道路上の基準点からの走行距離を算出し、この基準点からの走行距離に応じた走行道路上の地点に現在位置を補正する際に、算出した走行距離と地図データの道路形状にずれが生じ、道路区間上の正確な位置に現在位置を補正するのが困難になるといった問題がある。
【0005】
特に、起伏の激しい道路では、地図データに規定された道路長と実際の道路長との差が大きくなるため、算出した現在位置と地図データから読み出した道路形状のずれも大きくなり、道路区間上の正確な位置に現在位置を補正するのがより困難になるといった問題がある。
【0006】
本発明は上記問題に鑑みたもので、より正確な位置に現在位置を補正できるようにすることを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、請求項1に記載の発明は、移動距離を特定するための情報を収集する移動距離情報収集手段と、道路の形状および道路の長さを表す距離情報を規定した地図データを記憶媒体から読み出す読出手段と、読出手段により読み出された地図データから移動中の道路を選択し、移動距離情報収集手段により収集された移動距離を特定するための情報を用いて選択された移動中の道路上の基準点からの走行距離を算出し、この基準点からの移動距離に応じた移動中の道路上の地点に現在位置を補正する現在位置補正手段と、現在位置補正手段により補正された現在位置を地図上に表示する表示手段と、を備えた地図表示装置であって、地図データに規定されている道路の長さを表す距離情報は、実際の道路を計測して求めた実距離を用いて規定されたものであることを特徴としている。
【0008】
このような構成では、実際の道路を計測して求めた実距離を用いて地図データの道路の長さを表す距離情報が規定されているので、地図データから移動中の道路を選択し、この選択された移動中の道路上の基準点からの移動距離を算出し、この基準点からの移動距離に応じた移動中の道路上の地点に現在位置を補正する際に、算出した移動距離と地図データから読み出した道路形状のずれが生じにくく、より正確な位置に現在位置を補正することができる。
【発明を実施するための最良の形態】
【0009】
本発明の一実施形態に係る地図表示装置の構成を図1に示す。本地図表示装置は、ナビゲーション装置1として構成されている。本ナビゲーション装置1は、位置検出器10、地図データ取得部14、表示部15および制御部16を備えている。
【0010】
位置検出器10は、いずれも周知のGPS受信機11、ジャイロスコープ12、車速センサ13を有しており、これらのセンサから車両の現在位置および向きを特定するための情報が制御部16に入力される。また、車速センサ13から車速に応じた車速信号が制御部16に入力される。制御部16は、この車速信号から走行距離を求めることが可能となっている。
【0011】
地図データ取得部14は、地図データが記憶された記憶媒体から地図データを読み出すための装置である。本実施形態では、地図データを記憶したハードディスクドライブによって構成されている。
【0012】
地図データは、複数の交差点のそれぞれに対応するノードデータと、交差点と交差点を結ぶ道路区間すなわちリンクのそれぞれに対応するリンクデータと、川、湖、海、道路、鉄道、施設などの位置、形状、名称を表す背景データと、各地の施設の名称、所在位置、施設種類等を示す施設データとを有している。
【0013】
ノードデータには、当該ノードの識別番号、所在位置情報、種別情報が含まれており、リンクデータには、当該リンクの識別番号、距離情報(リンク長)、位置情報、種別情報等が含まれている。
【0014】
ここで、リンクの位置情報には、当該リンクが含む形状補完点の所在位置データ、および、当該リンクの両端のノードおよび形状補完点のうち隣り合う2つを繋ぐセグメントのデータが含まれている。各セグメントのデータは、当該セグメントの識別番号、当該セグメントの距離情報(セグメント長)等の情報を有している。
【0015】
表示部15は、液晶等のディスプレイを有し、制御部16から入力される映像信号に応じた映像をディスプレイに表示させる。
【0016】
制御部16は、CPU、メモリ、I/O等を備えたコンピュータとして構成されており、CPUはメモリに記憶されたプログラムに従って各種処理を実施する。
【0017】
制御部16の処理としては、位置検出器10から入力される情報に基づいて車両の現在位置と向きを算出する現在位置算出処理、車速センサ13から入力される車速信号に基づいて走行距離を算出する走行距離算出処理、現在位置算出処理により算出された車両の現在位置と向きおよび走行距離算出処理により算出された走行距離に基づいて走行軌跡を収集する走行軌跡収集処理、車両の現在位置周辺の地図上に現在位置マークを重ねて表示する地図表示処理、ユーザ操作に応じて目的地を検索する目的地検索処理、出発地から目的地に至る案内経路を探索する経路探索処理、案内経路に従って経路案内を行う経路案内処理等がある。
【0018】
本ナビゲーション装置1の地図データは、道路の長さを表す距離情報(リンク長、セグメント長等)が、実際の道路を計測して求めた実距離を用いて規定されたものとなっている。例えば、図2(a)に示すような、勾配が10%の道路では、A点とB点間の水平方向の距離(2000メートル)としてではなく、道路面に沿って計測した実距離(2030メートル)を用いて規定されたものとなっている。
【0019】
図2(a)に示されるように、A点を基準点として走行距離を算出すると、基準点から2030メートルの地点でB点に到達することになる。
【0020】
従来のナビゲーション装置で用いられている地図データは、A点とB点間の水平方向の距離(2030メートル)を用いてA点とB点間の距離が規定されているため、A点から2030メートルの地点をB点として現在位置を表示させようとすると、図2(b)に示すC点の位置(A点からの走行距離が2030メートルの地点)に現在位置がずれて表示されてしまうことになる。
【0021】
また、例えば、B点が経路探索により探索された案内経路における右折案内交差点となっているような場合、実際には自車はB点の手前に位置していても、制御部16により自車がB点を直進したものと判定され、自車が案内経路から外れたものと判定されてしまうといったことも考えられる。
【0022】
本実施形態におけるナビゲーション装置1で用いられている地図データは、道路面に沿って計測した実距離(2030メートル)を用いて道路の長さを表す距離情報が規定されているので、A点から2030メートルの地点をB点として現在位置を表示させる場合、図2(b)に示すB点の位置に現在位置が表示され、現在位置のずれはなくなる。また、上記したようにB点が右折案内交差点となっていても、自車がB点を直進したものと誤って判定されてしまうようなことをなくすことも可能である。
【0023】
このように実際の道路を計測して求めた実距離を用いて地図データの道路の長さを表す距離情報を規定することで、より正確な位置に現在位置を補正することが可能となっている。
【0024】
本ナビゲーション装置1の制御部16は、地図表示処理の際に、地図データから走行道路を選択し、自車の走行に伴って収集した走行軌跡と選択された走行道路とを照合して走行道路上の地点に現在位置を補正するマップマッチング処理を行う。
【0025】
次に、図3に従って、このマップマッチング処理について説明する。ユーザの操作に応じてイグニッションスイッチがオンすると、本ナビゲーション装置1は動作状態となり、制御部16は、上記した現在位置算出処理、走行距離算出処理等とともにこのマップマッチング処理を開始する。
【0026】
まず、車両の現在位置を特定する(S100)。この車両の現在位置は、現在位置算出処理により特定される。
【0027】
次に、地図データの読み出しを行う(S102)。具体的には、地図データ取得部14より自車位置周辺の地図データの読み出しを行う。
【0028】
次に、走行道路を選択する(S104)。ここでいう走行道路は、自車が走行している可能性のある道路を意味する。したがって、自車が走行している可能性のある道路が複数ある場合には、複数の走行道路を選択する。
【0029】
次に、走行距離の算出を行う(S106)。具体的には、車速センサ13から入力される車速信号を用いて走行道路上の基準点からの走行距離を算出する。なお、複数の走行道路が選択されている場合には、選択されている各走行道路について走行距離の算出を行う。
【0030】
次に、走行道路上の地点に現在位置を補正する(S108)。具体的には、S106にて算出された走行道路上の基準点からの走行距離に応じた走行道路上の地点に現在位置を補正する。なお、現在位置を補正する際には、ジャイロスコープ12から入力される情報に基づく自車の向きについても考慮される。ここでも、複数の走行道路が選択されている場合には、選択されている各走行道路について現在位置の補正を行う。
【0031】
次に、走行道路を決定する(S110)。このステップは、複数の走行道路が選択されている場合に実施されるもので、走行軌跡収集処理によって収集された走行軌跡と選択された各走行道路とを照合して最も確からしい走行道路を決定する。
【0032】
次に、現在位置を地図上に表示する(S112)。具体的には、先のS110にて決定された最も確からしい走行道路上の地点に現在位置を補正した地図を表示する。なお、先のS110にて確からしい走行道路が存在しない場合には、道路上の地点に現在位置を補正することなく、現在位置算出処理により特定された現在位置を地図上に表示させる。
【0033】
上記した処理を繰り返し実施し、最新の現在位置が道路上の地点に補正され地図上に表示される。
【0034】
上記した構成によれば、実際の道路を計測して求めた実距離を用いて地図データの道路の長さを表す距離情報が規定されているので、地図データから走行道路を選択し、この選択された走行道路上の基準点からの走行距離を算出し、この基準点からの走行距離に応じた走行道路上の地点に現在位置を補正する際に、算出した走行距離と地図データから読み出した道路形状のずれが生じにくく、より正確な位置に現在位置を補正することができる。また、より正確な位置に現在位置を補正することができるため、いわゆるマップマッチング外れの発生する頻度を低減することも可能である。
【0035】
なお、本発明は上記実施形態に限定されるものではなく、本発明の趣旨に基づいて種々なる形態で実施することができる。
【0036】
例えば、上記実施形態では、ハードディスクドライブから地図データを読み出す構成を示したが、例えば、DC、DVD等の記憶媒体に記憶された地図データの読み出しを行う読み取り装置を用いて地図データを読み出す構成としてもよく、また、地図データを配信する情報センタに配置された地図データ配信装置から通信により地図データを読み出す構成としてもよい。
【0037】
また、上記実施形態では、車速センサ13から入力される車速信号を用いて移動距離を算出する例を示したが、車速センサ13に限定されることなく、例えば、GPS受信機から入力される信号を用いて移動距離を算出するようにしてもよい。
【0038】
また、上記実施形態では、ナビゲーション装置を例に地図表示装置について説明したが、ナビゲーション装置に限定されるものではなく、例えば、地図表示機能を備えた携帯電話、携帯情報端末等に適用してもよい。
【0039】
なお、上記実施形態における構成と特許請求の範囲の構成との対応関係について説明すると、車速センサ13が移動距離情報収集手段に相当し、地図データ取得部14が読出手段に相当し、S104、S106、S108が現在位置補正手段に相当し、S112が表示手段に相当する。
【図面の簡単な説明】
【0040】
【図1】本発明の一実施形態に係る地図表示装置の構成を示す図である。
【図2】A点からの走行距離を算出して、A点からの走行距離に応じた道路上の地点に現在位置を表示させる処理について説明するための図である。
【図3】マップマッチング処理のフローチャートである。
【符号の説明】
【0041】
1…ナビゲーション装置、10…位置検出器、11…GPS受信機、
12…ジャイロスコープ、13…車速センサ、14…地図データ取得部、
15…表示部、16…制御部。
【特許請求の範囲】
【請求項1】
移動距離を特定するための情報を収集する移動距離情報収集手段と、
道路の形状および道路の長さを表す距離情報を規定した地図データを記憶媒体から読み出す読出手段と、
前記読出手段により読み出された前記地図データから移動中の道路を選択し、前記移動距離情報収集手段により収集された前記移動距離を特定するための情報を用いて前記選択された移動中の道路上の基準点からの走行距離を算出し、この基準点からの移動距離に応じた移動中の道路上の地点に現在位置を補正する現在位置補正手段と、
前記現在位置補正手段により補正された現在位置を地図上に表示する表示手段と、を備えた地図表示装置であって、
前記地図データに規定されている前記道路の長さを表す距離情報は、実際の道路を計測して求めた実距離を用いて規定されたものであることを特徴とする地図表示装置。
【請求項1】
移動距離を特定するための情報を収集する移動距離情報収集手段と、
道路の形状および道路の長さを表す距離情報を規定した地図データを記憶媒体から読み出す読出手段と、
前記読出手段により読み出された前記地図データから移動中の道路を選択し、前記移動距離情報収集手段により収集された前記移動距離を特定するための情報を用いて前記選択された移動中の道路上の基準点からの走行距離を算出し、この基準点からの移動距離に応じた移動中の道路上の地点に現在位置を補正する現在位置補正手段と、
前記現在位置補正手段により補正された現在位置を地図上に表示する表示手段と、を備えた地図表示装置であって、
前記地図データに規定されている前記道路の長さを表す距離情報は、実際の道路を計測して求めた実距離を用いて規定されたものであることを特徴とする地図表示装置。
【図1】


【図2】

【図3】
【図2】
【図3】
【公開番号】特開2009−128225(P2009−128225A)
【公開日】平成21年6月11日(2009.6.11)
【国際特許分類】
【出願番号】特願2007−304442(P2007−304442)
【出願日】平成19年11月26日(2007.11.26)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成21年6月11日(2009.6.11)
【国際特許分類】
【出願日】平成19年11月26日(2007.11.26)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]