
経路探索装置、経路探索方法、経路案内装置および経路案内方法

【課題】渋滞が発生したり当該渋滞の発生が予想されたとしてもユーザの迷いを軽減できるようにする。また、除外キーなどのキー操作を要することなく不満な道路を除外できるようにした経路探索方法および経路探索装置を提供する。
【解決手段】過去に走行したことがある経験経路Raを探索するときに、当該経路Raに渋滞が発生したり、当該渋滞の発生が予想されたとしても、今回の経路探索時の総コストから過去の経路探索時の総コストを減算した結果が所定値を超えるときには、経験経路Raの周辺の経路で且つ経験経路Raへの復帰が容易な復帰容易経路Rcを優先した経路探索を行う(T2〜T9)。
【解決手段】過去に走行したことがある経験経路Raを探索するときに、当該経路Raに渋滞が発生したり、当該渋滞の発生が予想されたとしても、今回の経路探索時の総コストから過去の経路探索時の総コストを減算した結果が所定値を超えるときには、経験経路Raの周辺の経路で且つ経験経路Raへの復帰が容易な復帰容易経路Rcを優先した経路探索を行う(T2〜T9)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、経路を探索するための経路探索装置、経路探索方法、当該経路を案内するための経路案内装置、経路案内方法に関する。
【背景技術】
【0002】
この種の経路探索装置、経路案内装置は様々開発されている(例えば特許文献1〜3参照)。特許文献1記載の技術思想は、過去の移動経路を誘導経路として設定することを提案している。また、特許文献2記載の技術思想では、算出した経路に対する実際の離脱移動経路を記憶し、次回の算出経路に反映するようにしている。また、特許文献3記載の技術思想では、ユーザが除外キーの操作によって対象道路を回避する経路を設定できる。
【0003】
例えば、自宅などから目的地まで道路を移動する場合、初めて移動する道路は途中の道路状況の知識がないため移動中の精神的負担が強い。そこで、特許文献1、2記載の技術思想では、過去に移動した経路を記憶することで、以前に移動した道路を通行するときには過去に移動した経路を再現することができ、精神的負担を軽減できる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−89996号公報
【特許文献2】特開2001−124578号公報
【特許文献3】特開2004−125416号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、過去に移動した経路に渋滞が発生、または、渋滞の発生が予測される場合には、ユーザは、過去に移動した経路で移動可能な安心感を得るか、渋滞がなさそうな別経路を開拓するか、の迷いを生じる。
【0006】
また、特許文献3記載の技術思想では、ユーザが往路に不満を生じた場合に復路では除外して設定することができるが、除外したい所望の道路を移動中にユーザが除外キーを操作する必要があり、対象道路の移動中に即座に除外したいと判断し除外キーを操作するか、除外するために再度対象道路を移動する必要があり、ユーザ使用の利便性が損なわれる。
【0007】
本発明の第1の目的は、渋滞が発生したり当該渋滞の発生が予想されたとしてもユーザの迷いを軽減できるようにした経路探索装置および経路探索方法を提供することにあり、第2の目的は、除外キーなどのキー操作を要することなく不満な道路を除外できるようにした経路探索装置および経路探索方法を提供することにある。また、前記の経路探索方法を適用した経路案内装置、経路案内方法を提供することにある。
【課題を解決するための手段】
【0008】
請求項1記載の発明によれば、過去に移動したことがある経験経路を少なくとも一部含む経路を探索するときに、たとえ過去に移動した経験経路に渋滞が発生したり、渋滞の発生が予測されることにより、今回の経路探索時の総コストから過去の経路探索時の総コストを減算した結果が所定値を超える場合であっても、経路探索手段は、経験経路を迂回する経験経路周辺の経路で且つ当該経験経路への復帰が容易な復帰容易経路を優先した経路探索を行うため、ユーザは直ぐに経験経路に復帰できるという安心感を得られるようになり、ユーザの迷いを軽減できる。
【0009】
請求項2記載の発明によれば、復帰容易経路が今回の経験経路探索時の総コストを増加させた経験経路部分を迂回する経路であるため、総コストを増加させた原因となる経験経路部分(例えば渋滞区間)を回避することができる。
【0010】
請求項3,8記載の発明に示すように、経験経路への復帰が容易な復帰容易経路を、(1)当該復帰容易経路から経験経路に復帰するための交差点または分岐点が所定点より多い道路、(2)復帰容易経路から経験経路に復帰するまでの距離が所定距離より短い道路、の少なくとも何れか一つの条件を満たす経路とすると良い。このような条件を適用した場合、直ぐに経験経路に復帰可能な経路を選定することができる。
【0011】
請求項4記載の発明によれば、経路探索手段が復帰容易経路を探索するときには、前記(1)を含む道路で交差点または分岐点が所定点より多ければ多いほどその道路のコストを低くし、(2)を含む道路では距離が短いほどその道路のコストを低くして、経路のコストの積算を行い、最もコストの低い経路を復帰容易経路の探索結果として出力するため、コストを低くした復帰容易経路を導出することができる。
【0012】
請求項5記載の発明によれば、経路探索手段は、復帰容易経路における経路探索時の総コストが第2所定値を超えないように復帰容易経路を探索するが、この場合、最もコストの低い探索経路であっても第2所定値を超えた場合には復帰容易経路を破棄して経験経路を採用するため、復帰容易経路を破棄することでユーザの迷いをなくすことができる。
【0013】
請求項6記載の発明のように、迂回対象部分が経験経路の一部を占めている場合には、経路探索手段は迂回対象部分以外の経験経路から離脱し再び迂回対象部分以外の経験経路へと接続するような復帰容易経路を探索し、第2所定値を迂回対象部分の今回の探索時におけるコストより小さい値とすると良い。
【0014】
請求項7記載の発明によれば、推定手段は、ユーザの行動からユーザの移動経路の中で不満を感じた不満経路部分を推定し、経路探索手段が、過去に移動したことがある経験経路を少なくとも一部含む経路を探索するときに、たとえ過去に移動した経験経路に不満経路部分が含まれる場合であっても、経験経路の不満経路部分を迂回し、且つ、不満経路部分を含む経験経路への復帰が容易な復帰容易経路を優先した経路計算を行うため、ユーザが除外キーなどのキー操作を要することなく不満な道路を除外して経路設定できる。
【0015】
請求項9記載の発明によれば、経験経路上に不満経路部分が複数に分かれて存在する場合、隣接する不満経路部分が所定の条件を満足するときには、それら不満経路部分をひとまとめにして迂回するため、不満経路部分を一つ一つ迂回するよりも移動効率の良い経路を探索できる。
【0016】
請求項10記載の発明のように、所定の条件を経験経路に隣接する不満経路部分が所定距離以内にある場合を含むようにすると良い。
請求項11記載の発明によれば、過去に移動したことがある経験経路と、当該経験経路への復帰が容易な復帰容易経路とを表示装置の表示画面に同時に表示させるため、ユーザが経験経路以外の経路を移動することで不安を生じたとしても、ユーザが表示手段の表示画面を確認するだけで直ぐに経験経路に復帰できるという安心感が得られる。
【0017】
請求項12記載の発明によれば、経験経路に渋滞区間と不満経路部分の双方が含まれる場合、渋滞区間が経験経路の不満経路部分と当該不満経路部分を除く非不満経路部分に跨って存在する場合に、不満経路部分への分岐点や経路と、前記非不満経路部分への分岐点や経路とを区別して表示させるため、ユーザは明確に認識できる。
【0018】
なお、本発明における「総コスト」とは、移動体が例えば車両の場合、ユーザが経路を運転した場合の移動に関する障害の総負荷をポイントなどの一つの指標により示したものである。例えば、出発地から目的地までの総コストは、当該出発地から目的地までの距離、通行道路の車線数、右折数、左折数、通行道路の渋滞の有無およびその程度、通行道路の車両通行規制、合流の有無やその回数、レーン変更回数などの少なくとも一部または全部の要素を、総じてポイントに置き換えてカウントした結果を示している。
【0019】
したがって、これらの総コストが高ければ例えば車両の場合には運転の負荷が高く、総コストが低ければ運転の負荷が低い。例えば車両ではなく、歩行者が所持する経路探索装置の場合であっても、出発地から目的地までの距離が長ければ移動負荷が高く総コストが高く、距離が短ければ移動負荷が低く総コストが低いため、歩行者などが経路探索装置を所持する場合でも本発明は同様に適用できる。
【図面の簡単な説明】
【0020】
【図1】本発明の第1実施形態における電気的構成を概略的に示すブロック図
【図2】リンクの定義を示す説明図
【図3】目的地までの経路探索処理、経路案内処理の一連の流れを説明するフローチャート
【図4】経路探索処理を説明するフローチャート
【図5】移動履歴情報の一例を表す図
【図6】経路探索処理の説明図
【図7】従来例の経路探索処理を説明する説明図
【図8】経路探索処理の他の態様を説明する説明図
【図9】経路探索処理における他の態様の説明図
【図10】画面表示処理を説明するフローチャート
【図11】表示画面例
【図12】本発明の第2実施形態における図4相当図
【図13】図10相当図
【図14】図11相当図
【図15】本発明の第3実施形態を示す経路探索情報、経路案内情報の送受信関係を示すシステム構成図
【発明を実施するための形態】
【0021】
(第1実施形態)
以下、本発明の経路探索装置、経路探索方法、経路案内装置、経路案内方法を車両用ナビゲーション装置の機能として構成適用した第1実施形態について図1ないし図11を参照しながら説明する。図1は、車両用ナビゲーション装置の電気的構成を概略的なブロック図により示している。
【0022】
図1に示すように、車両用ナビゲーション装置1は制御装置2を備え、当該制御装置(制御ユニット)2に、位置検出器3、地図データ入力器4、操作スイッチ群5、VICS(登録商標)受信機6、通信装置7、外部メモリ8、表示装置9、音声コントローラ10、音声認識部11、リモコンセンサ12を接続して構成される。
【0023】
リモコンセンサ12にはリモコン13が赤外線接続され、音声コントローラ10にはスピーカ14が接続され、音声認識部11にはマイク15が接続される。経路探索装置A、経路案内装置A2は、スピーカ14、マイク15、表示装置9などの報知部を具備していても具備していなくても良い。
【0024】
制御装置2は、例えばマイクロコンピュータを主体として構成されたものであり、CPU、メモリ(RAM、ROM)及びI/Oバス(何れも図示せず)を備え、各種の制御プログラムを実行して装置全体の動作を制御する。この制御装置2の内部には、経路探索部2a、経路案内部2b、表示制御部2c、推定部2dの各機能部が備えられており、経路探索装置Aおよび経路案内装置A2は、制御装置2の制御装置2が実行するソフトウェアにより実現されるものである。
【0025】
位置検出器3は、Gセンサ3a、ジャイロスコープ3b、距離センサ3c、GPS受信機3d等を備えて構成され、これらの各構成要素は互いに性質の異なる検出誤差を有している。制御装置2はこれら各構成要素から入力した検出信号を互いに補間して車両の現在位置を特定する。
【0026】
この場合、位置検出器3は、要求される検出精度で車両の現在位置を検出可能であれば、これら全ての構成要素を備える必要はなく、又、ステアリングの舵角を検出するステアリングセンサや各車輪の回転を検出する車輪センサ等が組み合わされて構成されていても良い。
【0027】
地図データ入力器4は、CD−ROM、DVD−ROM、メモリカード又はHDD等の記録媒体を装着し、地図データやマップマッチング用データ等を入力する。操作スイッチ群5は、表示装置9の周辺に配置されるメカニカルキー、表示装置9の表示画面上に形成されるタッチキーを含んで構成され、例えばユーザが何らかの操作(例えばメニュー表示選択、目的地設定、経路探索、経路案内開始、表示画面変更及び音量調整等)を行った旨を検出すると、操作検出信号を制御部2に出力する。
【0028】
VICS受信機6は、広域通信網を通じて広域通信を行い、VICSセンター装置(図示せず)から送信されたVICS情報について広域通信網を通じて受信する。外部メモリ8は、HDD等の大容量記憶装置から構成されている。
【0029】
表示装置9は、例えばカラー液晶ディスプレイにより構成され、メニュー選択画面、目的地設定画面、経路案内画面等の各種の表示画面を表示すると共に、車両の現在位置を表す現在位置マークや走行軌跡等を地図データの地図上に重ねて表示する。尚、表示装置9は、有機ELやプラズマディスプレイ装置等から構成されていても良い。
【0030】
音声コントローラ10は、例えば警告音や経路案内の案内音声等をスピーカ14から出力させる。音声認識部11は、制御部2により動作が制御され、起動状態ではマイク15から入力した音声を音声認識アルゴリズムにしたがって音声認識可能な状態とする。リモコンセンサ12は、リモコン13から送信された操作検出信号を受信すると、その受信した操作検出信号を制御部2に出力する。
【0031】
制御装置2は、地図データを取得する地図データ取得部、車両の現在位置と地図データ取得部により取得された地図データ内の道路データとを使用して車両の現在位置が存在する道路を特定するマップマッチング部、マップマッチング部により特定された車両の現在位置からユーザにより設定された目的地までの経路を探索する経路探索部2a、経路探索部により探索された経路及び地図データ内の道路データや交差点の位置データ等に基づいて経路案内に必要な地点を算出して経路案内する経路案内部2b、車両の現在位置周辺の地図や高速道路の略図や交差点付近の拡大図等を描画する表示制御部2c等を備えている。制御装置2の経路探索部2aが経路探索手段として機能し、経路案内部2bが経路案内手段として機能し、表示制御部2cが表示制御手段として機能する。
【0032】
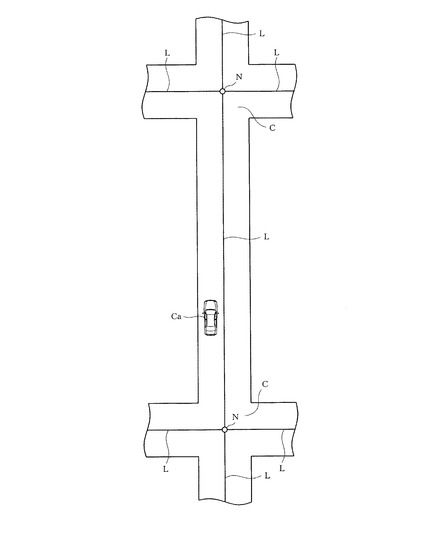
図2は、地図データとして記憶される道路データの概要を示している。
地図データは、各交差点Cの中央に設定されるノードNや、このノードN間を結合するリンクLを含んだ道路データにより構成される。例えば、片側一車線の直線道路では、図2に示されるように、車両Caが左側通行している場合を考慮すると、各交差点Cの中央に設定されたノードN間を結合するリンクLが道路幅方向の中央に設定されている。
【0033】
このリンクLには、複数のノードN間を結合する間に複数の形状点が設定されており、当該複数の形状点に対応して形状データ(例えば幅、高さ等)が設定されており、当該形状データに応じた道路データが記憶されている。複数のリンクLは、それぞれリンクID(リンク識別情報)が付されており、交差点Cを結合する道路毎にそれぞれ異なるID(識別情報)が付された状態で管理されている。
【0034】
前記構成において、ユーザが迷いを生じることなく出発地と目的地との間の経路を設定できるようにすることを目的とした実施形態を示す。
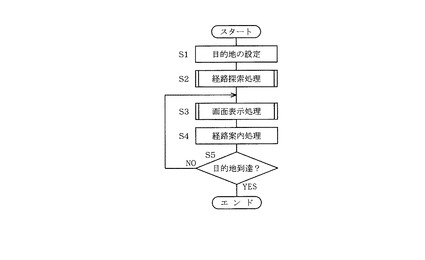
図3は、制御装置が行う経路案内処理をフローチャートによって示している。まず、操作スイッチ群5のユーザ操作により目的地が設定される(S1)。目的地が設定されると、制御装置2は、出発地(現在位置)から目的地に至るまでの経路探索処理を行う(S2)。
【0035】
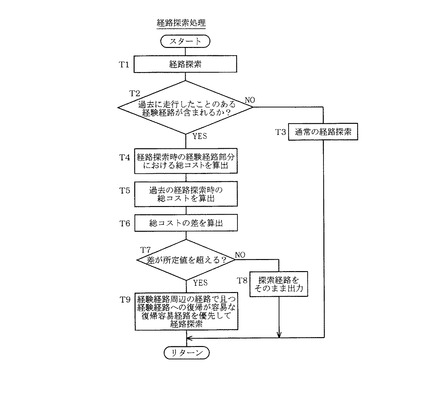
図4は、経路探索処理をフローチャートにより示している。まず、経路探索処理において、制御装置2は現在位置から目的地までの経路について経路探索し(T1)、過去に走行したことのある経験経路か否かを判定する(T2)。このステップT2において、制御装置2は移動履歴情報を参照し、ステップT1において探索した経路の一部に過去に走行したことのある経験経路が含まれるか否かを判定する。
【0036】
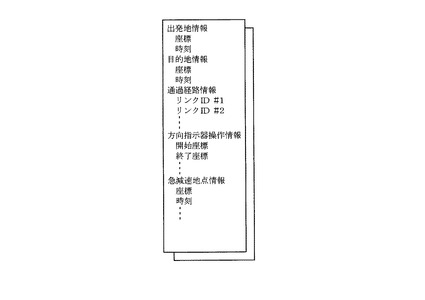
図5は、移動履歴情報の一例を示している。移動履歴情報は、車両Caの制御装置2がメモリ内に記憶する情報であり、移動軌跡情報、また、必要に応じて移動体の動作情報を含む。移動軌跡情報は、出発地情報(出発地座標、出発地出発時刻)、目的地情報(目的地座標、目的地到着時刻)、出発地から到着地までの座標点列、出発地〜到着地に至るまでに通過(出発/到達)するリンクLの識別情報(リンクID列:通過経路情報)、さらに、出発地〜到着地に至るまでに通過(出発/到達)するノードNの識別情報、を示している。移動体の動作情報は、車両Caの方向指示器を操作した方向指示器操作情報(開始座標、終了座標)、アクセル/ブレーキ操作に伴う急減速動作を示した急減速地点情報(座標、時刻)などを示している。なお、移動体の動作情報は、移動軌跡情報と関連付けがなされていると良い。
【0037】
図4に示すように、制御装置2は、ステップT2において、過去に走行したことのある経験経路が含まれない(T2:NO)と判定したときには、通常の経路探索を行った経路探索結果を出力して前述の経路案内処理に戻るが、ステップT2において、過去に走行したことのある経験経路が含まれる(T2:YES)と判定したときには、下記のステップT4〜T9に示す渋滞回避処理を行う。これらの処理では、制御装置2は、今回の経路探索時の経験経路部分における総コストを算出し(T4)、一方、過去(例えば前回)の経路探索時の当該経験経路部分における総コストを算出する(T5)。
【0038】
この「総コスト」とは、車両Caの場合、ユーザがある定められた経路を運転した場合の障害の総負荷をポイントなどの一つの指標により示したものである。例えば、出発地から目的地までの総コストは、当該出発地から目的地までの距離、通行道路の車線数、右折数、左折数、通行道路の渋滞の有無およびその程度、通行道路の車両通行規制、合流の有無やその回数、レーン変更回数などの少なくとも一部または全部の要素を、総じてポイントに置き換えてカウントした結果を示している。したがって、これらの総コストが高ければ、運転の負荷が高く、総コストが低ければ運転の負荷が低い。また、ここで言う過去の経路探索時の総コストは、今回の経路探索から遡って1回目の前回の経路探索時の総コストであっても良いし、過去に走行した複数回の経路探索時の総コストの平均であっても良い。
【0039】
そして、制御装置2は総コストの差を算出する(T6)。制御装置2は、ステップT4およびT5にて算出された総コストの差が所定値以下であると判定すると(T7:NO)、探索経路をそのまま出力する。これは、現時点で、経験経路上に何も渋滞(障害)を生じていない、もしくは、渋滞を生じていたとしても微々たる渋滞と判定したことを示しており、この場合、探索経路をそのまま出力することで、ユーザが過去に走行したことがある経験経路をそのまま案内する。すると、ユーザは安心感が保たれる。
【0040】
他方、制御装置2は、ステップT4およびT5にて算出された総コストの差が所定値を超えると判定すると(T7:YES)、現時点で、経験経路上に渋滞(何らかの障害)が発生している、もしくは、渋滞の発生が予測されることを判断する。
【0041】
この場合、制御装置2は、経験経路の周辺の迂回経路で且つ経験経路への復帰が容易な復帰容易経路を優先して経路探索を行う(T9)。ここで、経験経路の周辺の迂回経路を探索する理由は、渋滞(障害)の回避が可能なためであり、しかも経験経路が近くに存在するためである。この場合、渋滞の存在する経路が予め判明している場合には、当該渋滞の存在する経路部分のみ経験経路の周辺の経路を探索すると良い。すると、経験経路の一部分のみ回避するだけで、渋滞を回避することができる。例えば、経験経路の一部が混雑しており、そこが結果的にコストアップを招いているため、混雑部分に限定して迂回すると良い。
【0042】
より好ましくは、経験経路部分を細分化(ノード、リンク単位に細分化)し、各ノード間、あるいはリンク単位での旅行時間(走行した場合にかかる時間の実績と予測値)を前回実績と今回探索時で比較し、旅行時間に一定時間以上の乖離があるノード間群、リンク群を迂回するようにすると良い。
【0043】
例えば、経験経路がリンクA、B、C、D、Eを直列したものであった場合に、各リンク毎の旅行時間を前回の実績と今回の探索結果とで比較する。今回の探索結果では、例えば、VICS受信機6により取得する交通情報の中に、当該リンクに関する予測旅行時間が含まれているものとする。そして比較の結果、仮に、リンクB、Cでの予測旅行時間が前回の旅行時間の実績に比べ一定以上増加していると判断された場合には、経験経路周辺で、リンクB、Cだけを迂回する経路であって、リンクA〜Eの全てに対して復帰容易な経路を優先した経路探索を行うようにすると良い。
【0044】
これによれば、ユーザは経験経路の中でも、混雑している問題のある部分だけを迂回でき、かつなるべく経験経路を走行できるような経路が案内されるので、より安心感が得られる。また、迂回路に不安を感じた場合も、経験経路に容易に復帰できるため、安心感がある。
【0045】
また、制御装置2は、ステップT9において経験経路への復帰が容易な復帰容易経路を優先して経路探索を行うが、「過去に走行した経験経路への復帰が容易な復帰容易経路」とは以下の(1)〜(3)のうち少なくとも何れか一つの条件を満たした経路とすると良い。
【0046】
(1)経験経路に復帰するための交差点または分岐点が所定点より多い道路
(2)経験経路の離脱点から過去に走行した経験経路への復帰点までの距離が所定距離より短い道路
(3)交差点、または、分岐点までの距離が短い道路
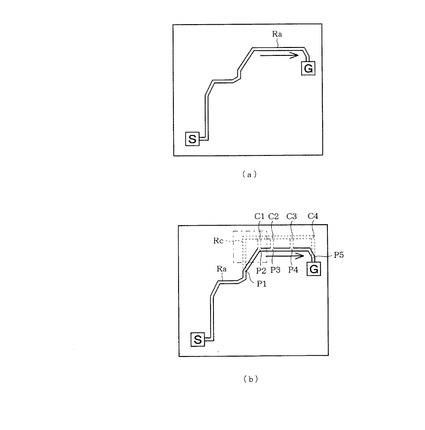
図6(a)、図6(b)は本実施形態の経路探索処理の説明図を示している。例えばユーザが出発地(S)から目的地(G)の経路探索を行う場合に、所定の探索優先条件(例えば、幹線道路優先、距離優先など)に応じて図6(a)に示す経路Raを探索した場合を考慮する。この場合、Raはその全ての部分が過去に走行したことのある経験経路であると仮定する。この経験経路Raを迂回するために経路を変更した場合には、ステップT9において経験経路Raの周辺の復帰容易経路Rcを探索する。
【0047】
この場合、前述の(1)〜(3)の条件のうち(1)の条件は、図6(b)に示す例では、復帰容易経路Rcから経験経路Raに復帰するための交差点や分岐点が多い経路を選択すると良いことを示している。
【0048】
また、(2)の条件は図6(b)に示す例では、経路Raから経路Rcに離脱した離脱点P1から経路Raに復帰するまで復帰点P2(またはP3〜P5の何れか)までの距離が所定距離より短いと良いことを示している。また、(3)の条件は図6(b)に示す例では、離脱点P1から交差点(または分岐点)C1〜C4までの距離が所定距離より短い経路であると良いことを示している。
【0049】
これらは、経路Rcが過去に走行したことがある経験経路Raに戻り易い経路であれば、ユーザは経路Rcを走行中においても安心感を保つことができるためである。また、経路Rcがユーザにとって初めて走行する未経験道路であるときには新規な経路を開拓することができ、ユーザの道路知識も増すという効果を奏する。
【0050】
また、過去に走行した経験経路Raに近い道路の特徴部分(例えば、道路種別(国道、県道、市道などが同じ)、道路幅、道路のレーン数、合流の有無、分岐方法などが同じまたは同等)を有する類似経路を優先的に選択したり、経験経路Raの特徴(右左折数またはレーン変更回数が同じまたは同等)を有する類似経路を優先的に選択すると良い。このような場合、ユーザは類似道路の走行経験を活かして道路を走行することができる。
【0051】
図7は、従来例の経路探索処理の説明図を示している。図7に示すように、ユーザが例えばこの経験経路Raを迂回するために探索優先条件を変更した場合には経験経路Raとは全く別の経路Rbが探索されてしまうことが多い。すると、ユーザはこの経路Rbに不安を抱くこともある。そこで、本実施形態では、前述した図6を用いて説明した経路探索処理を適用しているものであり、経路探索処理を行った結果、所定の探索優先条件を適用した場合の探索経路Raの大部分を利用し、一部分だけ周辺経路Rcを適用した経路を探索結果として出力するものである。
【0052】
以下、他の例を示す。
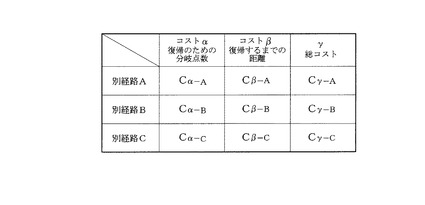
この別経路(復帰容易経路)の算出については、以下のようにもできる。以下の例では複数経路が候補となった場合について、図8、図9を参照して説明する。ここでは経験経路を迂回する復帰容易経路の候補として別経路A〜Cが抽出されている。このとき、この別経路候補から最適なものを選択してユーザに提示するため、制御装置2では別経路A〜Cに対してコスト計算を行い経路比較する。コストは、経験経路に復帰するための分岐点の数に関連するコストαと、復帰するまでの距離に関連するコストβを加算した総コストγをそれぞれ算出し、総コストγが最小となる経路を選択するようにする。図9には、別経路A〜C毎に算出されたコストα、コストβ、総コストγのテーブルを示している。
【0053】
コストαは具体的には、分岐点数の逆数を用いて所定の係数に当該逆数を乗算して算出される。すなわち、分岐点数が多ければそれだけコストαの値は減少するようになる。また、コストβは具体的には、まず、当初経路からの離脱点P1から各復帰点Pkまでの距離に夫々所定の重み係数を乗じた値を累積する。さらに離脱点P1から各分岐点までの距離に夫々所定の重み係数を乗じた値を累積し、その最大値または平均値を求める。そして両コストα、βの加算値を総コストγ算出することで求められる。
【0054】
このようにして、最も総コストγの低い別経路を特定してユーザに提示する。提示された別経路は、復帰のための選択肢に富み、かつ、復帰までの距離(時間)が短いものであるため、経験経路への復帰が特に容易である。そのため、ユーザはより安心感の得られる迂回路を得られる。
【0055】
また、総コストγは所定値(第2の所定値に相当)以下となるようにするとよい。すなわち、複数の別経路候補が抽出された場合でも、各経路がいずれも復帰しにくい経路である(総コストが所定値を超える)場合には、ユーザに安心した別経路を提示できない虞があるため、総コストを比較した結果、最もコストの低い経路であってもそのコスト値が所定値を超えた場合には、別経路を破棄して経験経路(当初経路)を選択するとよい。そして、好ましくは、ユーザに対して、例えば「現在、走ったことのある道が一番適切です。そのルートを案内します」などと報知する。
【0056】
このようにすれば、ユーザは、過去に移動した経路での安心感を得られる一方、(経験経路に復帰容易とはいえ)不安な別経路を開拓するという迷いをなくすことができる。
なお、別経路候補A〜CはP1から各復帰点Pkまでの距離の中で、最大値(最も遠い復帰点までの距離)が所定距離値以内であるような経路であると好ましい。また別経路候補A〜Cは、P1から各分岐点までの距離の中で、最大値(最も遠い分岐点までの距離)が所定距離以内であるような経路であると好ましい。
【0057】
このような経路であれば、経験経路復帰までの距離が短いので、ユーザは安心感を得られる。また、コストβの算出には離脱点P1から分岐点までの距離を採用したが、各分岐点間の距離を考慮して算出するようにしてもよい。このようにすれば、たとえばある別経路候補で離脱点P1、分岐点1、分岐点2の順に構成される経路の場合、離脱点P1から分岐点2までの距離は短いが、分岐点1から分岐点2までの距離がとても長いといったような場合にはコスト値を上げることにつながるため、よりユーザが安心できる最適別経路を選択することに貢献できる。
【0058】
さらに、経験経路の一部に迂回対象部分(例えば、渋滞)が存在し、別経路(迂回路)として経験経路の迂回対象部分以外から離脱し、復帰するような経路が候補として探索された場合には、前記第2の所定値はその渋滞によって増加するコスト値を超えないようにすると好適である。
【0059】
このようにすれば、経験経路よりも迂回路が案内されるため、ユーザの経験経路に復帰が容易な別経路を開拓でき、一方、より安心感はあるものの混雑により大幅に損失をこうむる経験経路を選択する迷いをなくすことができる。
【0060】
さて、図4に示す経路探索処理が終了すると、制御装置2は、図3に戻って目的地に到達する(S5:YES)まで、画面表示処理を行い(S3)ながら経路案内処理を行う(S4)。画面表示処理では、制御装置2は、実際に走行している経路を主として表示装置9の表示画面に表示制御する。具体的には、制御装置2は、経路Raを走行中は経路Ra、経路Rcを走行中は経路Rcを表示装置2の表示画面に表示制御する。
【0061】
図10は、画面表示処理を概略的なフローチャートにより示している。
この図10に示すように、ステップT9を処理したか否かを判定し(U1)、当該条件を満たさない場合(U1:NO)は、通常の画面表示制御を行い(U2)、この条件を満たした場合には(U1:YES)、経験経路Raと復帰容易経路Rcとを同時に表示装置2の表示画面に表示制御する。
【0062】
図11は、表示装置9の表示画面の具体例を示している。この図9に示すように、制御装置2は、過去に走行したことがある経験経路Raと同時に現在走行中の復帰容易経路Rcとを車両Caの現在位置と共に表示装置9の表示画面に表示制御する。例えば、図9に示すように、車両Caが復帰容易経路Rcを走行中であるときに、ユーザは復帰容易経路Rcを走行して次の交差点C1において右折すれば直ぐに経験経路Raに戻ることが可能であることを確認できる。
【0063】
本実施形態によれば、過去に走行したことがある経験経路Raを再度探索するときに、当該経路Raに渋滞が発生したり、当該渋滞の発生が予想されたとしても、今回の経路探索時の総コストから過去の経路探索時の総コストを減算した結果が所定値を超えるときには、経験経路Raの周辺の経路で且つ経験経路Raへの復帰が容易な復帰容易経路Rcを優先した経路探索を行うため、ユーザは直ぐに経験経路Raに復帰できるという安心感を得られるようになり、ユーザの迷いを軽減することができる。
【0064】
復帰容易経路は、今回の経験経路探索時の総コストを増加させた経験経路部分を迂回する経路であるため、総コストを増加させた原因となる渋滞区間を回避することができる。
経験経路への復帰が容易な復帰容易経路を、(1)当該復帰容易経路から経験経路に復帰するための交差点または分岐点が所定点より多い道路、(2)復帰容易経路から経験経路に復帰するまでの距離が所定距離より短い道路、の少なくとも何れか一つの条件を満たす経路としているため、直ぐに経験経路に復帰可能な経路を選定することができる。
【0065】
復帰容易経路を探索するときには、(1)を含む道路で交差点または分岐点が所定点より多ければ多いほどその道路のコストを低くし、(2)を含む道路では距離が短いほどその道路のコストを低くして、経路のコストの積算を行い、最もコストの低い経路を復帰容易経路の探索結果として出力するため、コストを低くした復帰容易経路を導出することができる。
【0066】
復帰容易経路における経路探索時の総コストが第2所定値を超えないように迂回路を探索するが、この場合、最もコストの低い探索経路であっても第2所定値を超えた場合には迂回路を破棄して経験経路を採用するため、迂回路を破棄することでユーザの迷いをなくすことができる。
【0067】
迂回対象部分が経験経路の一部を占めている場合には、経路探索手段は迂回対象部分以外の経験経路から離脱し再び迂回対象部分以外の経験経路へと接続するような復帰容易経路を探索し、第2所定値を迂回対象部分の今回の探索時におけるコストより小さい値としている。このように処理することで、経験経路よりも迂回路が案内されるため、ユーザの経験経路に復帰が容易な別経路を開拓でき、一方、より安心感はあるものの混雑により大幅に損失をこうむる経験経路を選択する迷いをなくすことができる。
【0068】
また、制御装置2は、経験経路Raと、経験経路Raへの復帰が容易な復帰容易経路Rcとを表示装置9の表示画面に同時に表示制御するため、ユーザが経験経路Ra以外の経路を走行することで不安を生じたとしても、ユーザが表示装置9の表示画面を確認するだけで直ぐに経験経路Raに復帰できるという安心感を抱くことができる。しかも、ユーザが未経験の道路である場合には、ユーザは新規の道路を開拓できるという格別な効果も奏する。
【0069】
(第2実施形態)
図12ないし図14は、本発明の第2実施形態を示すもので、前述実施形態と異なるところは、ユーザが過去に走行した経路に不満などが存在する場合に除外キーなどのキー操作を要することなく不満な道路を除外できるようにしたところにある。前述実施形態と同一または類似の部分については同一符号を付して説明を省略し、以下、異なる部分について説明する。
【0070】
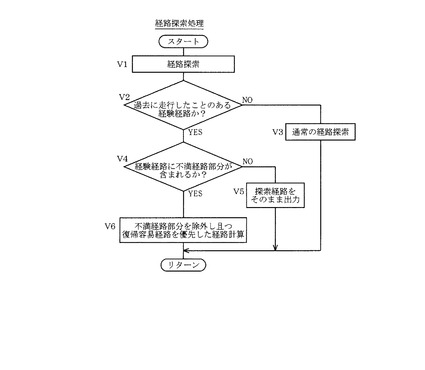
図12は、図4に代わる経路探索処理のフローチャートを示している。この図12に示すように、制御装置2は経路探索を行い(V1)、過去に走行したことのある経験経路Raであるか否かを判定し(V2)、経験経路Raでなければ(V2:NO)、通常の経路探索を行い(V3)終了する。制御装置2は、ステップV1において経路探索を行った結果、過去に走行したことのある経験経路Raの場合には(V2:YES)、経験経路Raに不満経路部分Rdを推定し当該不満経路部分Rdが含まれるか否かを判定する(V4)。このとき、不満経路部分Rdが含まれていなければ(V4:NO)、探索経路をそのまま出力して(V5)終了するが、不満経路部分Rdが含まれていれば(V4:YES)、不満経路部分Rdを除外し且つ復帰容易経路Rcを優先した経路探索を行う(V6)。すなわち、この復帰容易経路Rcは、不満経路部分Rdを迂回し、不満経路部分Rd以外の経験経路Ra(あるいは経験経路Raに不満経路部分Rdしかない場合には未経験経路)に接続する経路であって、かつ、この復帰容易経路Rcを選択したとしても、不満経路部分Rdを含む経験経路Raに簡単に復帰できるような経路である。
【0071】
ここで、ステップV4における不満な経路の判定処理は、移動履歴情報から道路の特徴や経路の特徴毎の走行経験数をカウントし、経験カウント数が所定値に満たない場合にユーザが不満のある経路であると推定して判定すると良い。
【0072】
制御装置2は、前記した移動履歴情報を車両Caの走行中には常に収集し、地図データ入力器4の地図データから車両Caが移動した道路の特徴ごと、経路の特徴ごとに経験回数をカウントする。制御装置2は、道路ごと、経路ごとの経験回数N2が所定値N1に満たない場合(すなわちN2<N1)には、その道路特徴、経路特徴を克服する移動スキルが十分ではないため、不満があると判断する。なお前記の「道路の特徴」とは、車線数、道路幅、道路種別(高速道路、自動車専用道、幹線道路、細街路等)を示しており、車両Caが移動した道路の特徴ごとに経験回数をカウントするものである。
【0073】
同様に、制御装置2は、移動軌跡情報と地図データと方向指示器操作情報とを照合することで右折、左折、合流、レーン移動等の行動を行ったか否かを判断し、これにより経路の特徴ごとの経験回数もカウントし移動スキルを判断する。この「経路の特徴」とは、右折、左折、道路の合流、レーン移動、難交差点(例えば5以上の道路が交差する交差点)等を示している。
【0074】
また、不満な経路の特定(推定)は、次に示すように行っても良い。生体情報(脳波、発汗、体温等)により感情を検知するBMI(Brain-machine Interface)技術等を用いて不快な感情を検知した場合、現在位置情報を取得して地図データ入力器4から入力される地図データと照合し、道路の特徴や経路の特徴や車両情報を総合的に判断し、不満が存在する経路であるか否かを判定する。このようにして不満な経路の特定(判定)を行っても良い。
【0075】
すなわち、ユーザが車両Caに搭乗して走行するときに嫌悪感を抱く道路は、例えば、車両通行量の多い道路、通行料金の高い道路、歩行者数が多い道路、など、ユーザの生活環境や嗜好によって様々変化するが、この場合、このような道路の走行回数が激減するため、道路や経路の経験カウント数や生体情報検知技術を用いて不満な経路であるか否かを判定すると良い。この技術を適用することで、よく通行している道路の不満な道路部分を避けて走行することができる。
【0076】
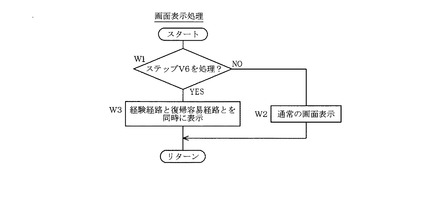
経路探索処理が終了すると、制御装置2は、ステップS3の画面表示処理を行う。本実施形態では、図13に示す画面表示処理を行う。この画面表示処理では、ステップV6を処理していなければ(W1:NO)、通常の画面表示を行い(W2)、ステップV6を処理していれば(W1:YES)、経験経路Raと復帰容易経路Rcとを同時に表示する(W3)。
【0077】
図14(a)〜図14(b)は、制御装置2による表示制御内容を示している。これらの図14(a)〜図14(b)では、過去に走行したことがあるものの不満経路部分Rdを含む経験経路Raと同時に走行中の復帰容易経路Rcとを車両Caの現在位置と共に表示装置9の表示画面に表示している。図14(a)、図14(b)中、経験経路Raと不満経路部分Rdの重なっている部分と、経験経路Raであるものの不満経路部分Rdではない部分とは、表示態様を異ならせている。例えば、RaおよびRdが重なっている部分の表示は「赤色」の道路表示とし、RaのみでRdが重なっていない部分の表示は「青色」の道路表示とする。
【0078】
例えば、図14(a)に示すように、車両Caが復帰容易経路Rcを走行中であるときに、ユーザは復帰容易経路Rcを走行して次の交差点C1にて右折すれば、不満経路部分Rdの道路を通行することなく直ぐに経験経路Raに戻ることが可能であることを確認できる。すると、過去に走行したことがある経験経路Raと現在の車両Caの位置との関係の把握が容易になり、また、過去に走行した経験経路Raに変更することが道路Yを走行することで容易であるという安心感を抱きながら復帰容易経路Rcを走行できる。
【0079】
また、図14(b)に示すように、経験経路Raが全て不満経路部分Rdであっても、ユーザは復帰容易経路Rcを走行して次の交差点C1にて右折すれば、不満経路部分Rdを含む経験経路Raに戻ることが可能であることを確認できる。この場合は、とりわけユーザが復帰容易経路Rcを走行する際に大きな不安を持つ場合であり、不満経路部分Rdであっても過去に走行した経験経路Raに簡単に復帰できるため、この場合でも安心感が得られる。また特に復帰容易経路Rcがユーザにとって初めて走行する道路であるときには新たな経路を開拓することができユーザの道路知識も増す。
【0080】
本実施形態によれば、過去に走行したことがある経験経路Raを再度探索したときに、ユーザの行動からユーザの移動経路の中で不満を感じた不満経路部分を推定し、過去に移動した経験経路Raに不満経路部分が含まれる場合に、経験経路Raの不満経路部分を除外し、且つ、経験経路Raへの復帰が容易な復帰容易経路Rcを優先した経路探索を行うため、除外キーなどのキー操作を要することなくユーザが不満な道路を除外できるようにできる。
【0081】
しかも、制御装置2は、過去に走行したことがあるものの不満経路部分となる経験経路Raと同時に走行中の復帰容易経路Rcとを車両Caの現在位置と共に表示装置9の表示画面に表示制御するため、過去に走行したことがある経路Raと現在の車両Caの位置との関係の把握が容易になり、また、過去に走行した経路Raに変更することが容易であるという安心感を抱きながら経路Rcを走行することができる。
【0082】
(第3実施形態)
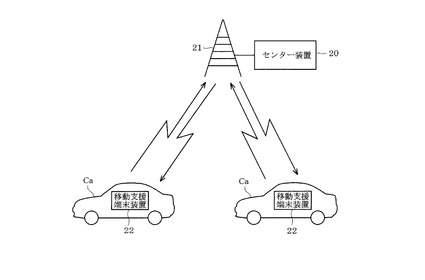
図15は、本発明の第3実施形態を示すもので、前述実施形態と異なるところは、経路探索装置が移動体の外部に設置されており、当該経路探索装置から車両に搭載された移動支援端末装置に経路探索情報を送信しているところにある。前述実施形態と同一または類似機能を有する部分については同一符号を付して説明を省略し、以下、異なる部分について説明する。
【0083】
前述実施形態にて説明した経路探索装置Aがナビゲーション装置1内に搭載された例を示しているが、この経路探索処理をその外部のセンター装置20で実行し、その経路計算結果を基地局21を通じて移動支援端末装置22に転送する例を示す。
【0084】
この場合、車両Caには移動支援端末装置22が搭載されており、当該移動支援端末装置22はセンター装置20との間で無線通信処理を行う通信装置(図示せず)を搭載している。この移動支援端末装置22は、センター装置20との間で基地局21を通じて無線通信接続し、出発地、経由地、目的地等の経路条件を送信する。そして、センター装置20は、前述した経路探索処理(例えば図4の処理)を行い、前述した総コストの条件を満たすか否かを判定し、条件を満たす経路情報を移動体Caの移動支援端末装置22に配信する。車両Ca側では移動支援端末装置22が車両Caの移動支援を行う。
【0085】
本実施形態によれば、経路探索装置Aが車両Caの外部に設置されており、経路探索装置Aから移動支援端末装置22に経路探索情報を送信しているため、車両Caの搭乗者であるユーザは前述実施形態とほぼ同様の恩恵を受けることができる。なお、移動支援端末装置22は前述実施形態のナビゲーション装置1との間で電気的接続(例えばLAN接続)されていても良いし、ナビゲーション装置1自体が移動支援端末装置22として構成されていても良い。
【0086】
車両Ca側の移動支援端末装置22が、前述実施形態に示した移動履歴情報を収集する移動履歴情報収集機能を備えていても良い。移動支援端末装置22はこの移動履歴情報収集機能により得た情報をセンター装置20に送信しセンター装置20が経路探索する。このような移動履歴情報は、ユーザがたとえ車両Caを売買したとしても、センター装置20側ではユーザ毎に恒久的に保存可能なデータとなる。したがって、ユーザが車両Caを乗り換えたとしても、センター装置20が移動履歴情報を集中管理できるため、ユーザは意識することなくユーザは前述実施形態とほぼ同様の恩恵を受けることができ、特に有効な経路探索処理形態となる。また、この移動履歴情報は膨大な情報量となるため、移動支援端末装置22側で処理負荷が膨大となり処理し切れない場合であっても、本実施形態の経路探索処理形態は特に有効な処理形態となる。
【0087】
(他の実施形態)
本発明は、上記実施形態に限定されるものではなく、例えば、以下に示す変形または拡張が可能である。
例えば、上述した図8のステップU3、図13のステップW3のような表示を行う場合、第1実施形態と第2実施形態の内容が両立する場合も当然考えられる。すなわち、経験経路Ra上の渋滞区間と不満経路部分Rdの双方が予め分かっているときには、以下のような表示を行うこともできる。
【0088】
つまり、その渋滞区間が経験経路Raの不満経路部分Rdと非不満経路部分に跨って存在する場合には、復帰容易経路Rcと復帰可能な経験経路Raを同時に表示すると良いが、この場合、不満経路部分Rdへの復帰ポイント(分岐点)や経路と、非不満経路部分への復帰ポイントや経路とを区別して表示する(後者を推奨するような表示や、色、大きさなどの表示様態を異ならせた表示とする)ことが好ましい。これは、ユーザによってはどうせ復帰するのであれば、不満のない経験経路Raに復帰することがより安心感を抱く場合もあると考えられるからである。
【0089】
また、経験経路に不満部分が複数離散的に点在するような場合、異なる不満部分の距離が所定距離以内であるようなときには、それら複数の不満部分を一つの群とみなして迂回するように別経路を探索してもよい。
【0090】
このようにすれば、不満部分どうしが近接している場合に、それら不満部分をいちいちひとつずつ迂回するような経路(不満部分を迂回して復帰しても、すぐに次の不満部分を迂回するために、走りなれた経験経路を離脱しなくてはならないような経路)を探索することがなくなり、ユーザがより安心感を得られる。
【0091】
また、前述実施形態に示した経路変更処理態様に限られず、経験経路Raの全部を対象としても、経験経路Raの一部を対象として復帰容易経路Rcに変更する経路探索を行っても良い。
【0092】
移動体として車両Caに適用した実施形態を主に示しているが、移動体は歩行者であっても良いことは言うまでもなく、経路探索装置A、経路案内装置A2は移動体に搭載されたものに限定されるわけではなく、移動体用に携帯可能なネットブック(パーソナルコンピュータ)、インターネットテレビ、携帯電話機、スマートフォン、電子書籍端末、携帯ゲーム機等の移動体用の各種装置に適用できる。
【0093】
歩行者が所持する経路探索装置A、経路案内装置A2の場合であっても、出発地から目的地までの距離が長ければ移動負荷が高く、距離が短ければ移動負荷が低いため、歩行者などが経路探索装置A、経路案内装置A2を所持する場合であっても本発明は同様に適用できる。
【符号の説明】
【0094】
図面中、2は制御装置、Aは経路探索装置、A2は経路案内装置、2aは経路探索部(経路探索手段)、2bは経路案内部(経路案内手段)、2cは表示制御部(表示制御手段)、2dは推定部(推定手段)を示す。
【技術分野】
【0001】
本発明は、経路を探索するための経路探索装置、経路探索方法、当該経路を案内するための経路案内装置、経路案内方法に関する。
【背景技術】
【0002】
この種の経路探索装置、経路案内装置は様々開発されている(例えば特許文献1〜3参照)。特許文献1記載の技術思想は、過去の移動経路を誘導経路として設定することを提案している。また、特許文献2記載の技術思想では、算出した経路に対する実際の離脱移動経路を記憶し、次回の算出経路に反映するようにしている。また、特許文献3記載の技術思想では、ユーザが除外キーの操作によって対象道路を回避する経路を設定できる。
【0003】
例えば、自宅などから目的地まで道路を移動する場合、初めて移動する道路は途中の道路状況の知識がないため移動中の精神的負担が強い。そこで、特許文献1、2記載の技術思想では、過去に移動した経路を記憶することで、以前に移動した道路を通行するときには過去に移動した経路を再現することができ、精神的負担を軽減できる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−89996号公報
【特許文献2】特開2001−124578号公報
【特許文献3】特開2004−125416号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、過去に移動した経路に渋滞が発生、または、渋滞の発生が予測される場合には、ユーザは、過去に移動した経路で移動可能な安心感を得るか、渋滞がなさそうな別経路を開拓するか、の迷いを生じる。
【0006】
また、特許文献3記載の技術思想では、ユーザが往路に不満を生じた場合に復路では除外して設定することができるが、除外したい所望の道路を移動中にユーザが除外キーを操作する必要があり、対象道路の移動中に即座に除外したいと判断し除外キーを操作するか、除外するために再度対象道路を移動する必要があり、ユーザ使用の利便性が損なわれる。
【0007】
本発明の第1の目的は、渋滞が発生したり当該渋滞の発生が予想されたとしてもユーザの迷いを軽減できるようにした経路探索装置および経路探索方法を提供することにあり、第2の目的は、除外キーなどのキー操作を要することなく不満な道路を除外できるようにした経路探索装置および経路探索方法を提供することにある。また、前記の経路探索方法を適用した経路案内装置、経路案内方法を提供することにある。
【課題を解決するための手段】
【0008】
請求項1記載の発明によれば、過去に移動したことがある経験経路を少なくとも一部含む経路を探索するときに、たとえ過去に移動した経験経路に渋滞が発生したり、渋滞の発生が予測されることにより、今回の経路探索時の総コストから過去の経路探索時の総コストを減算した結果が所定値を超える場合であっても、経路探索手段は、経験経路を迂回する経験経路周辺の経路で且つ当該経験経路への復帰が容易な復帰容易経路を優先した経路探索を行うため、ユーザは直ぐに経験経路に復帰できるという安心感を得られるようになり、ユーザの迷いを軽減できる。
【0009】
請求項2記載の発明によれば、復帰容易経路が今回の経験経路探索時の総コストを増加させた経験経路部分を迂回する経路であるため、総コストを増加させた原因となる経験経路部分(例えば渋滞区間)を回避することができる。
【0010】
請求項3,8記載の発明に示すように、経験経路への復帰が容易な復帰容易経路を、(1)当該復帰容易経路から経験経路に復帰するための交差点または分岐点が所定点より多い道路、(2)復帰容易経路から経験経路に復帰するまでの距離が所定距離より短い道路、の少なくとも何れか一つの条件を満たす経路とすると良い。このような条件を適用した場合、直ぐに経験経路に復帰可能な経路を選定することができる。
【0011】
請求項4記載の発明によれば、経路探索手段が復帰容易経路を探索するときには、前記(1)を含む道路で交差点または分岐点が所定点より多ければ多いほどその道路のコストを低くし、(2)を含む道路では距離が短いほどその道路のコストを低くして、経路のコストの積算を行い、最もコストの低い経路を復帰容易経路の探索結果として出力するため、コストを低くした復帰容易経路を導出することができる。
【0012】
請求項5記載の発明によれば、経路探索手段は、復帰容易経路における経路探索時の総コストが第2所定値を超えないように復帰容易経路を探索するが、この場合、最もコストの低い探索経路であっても第2所定値を超えた場合には復帰容易経路を破棄して経験経路を採用するため、復帰容易経路を破棄することでユーザの迷いをなくすことができる。
【0013】
請求項6記載の発明のように、迂回対象部分が経験経路の一部を占めている場合には、経路探索手段は迂回対象部分以外の経験経路から離脱し再び迂回対象部分以外の経験経路へと接続するような復帰容易経路を探索し、第2所定値を迂回対象部分の今回の探索時におけるコストより小さい値とすると良い。
【0014】
請求項7記載の発明によれば、推定手段は、ユーザの行動からユーザの移動経路の中で不満を感じた不満経路部分を推定し、経路探索手段が、過去に移動したことがある経験経路を少なくとも一部含む経路を探索するときに、たとえ過去に移動した経験経路に不満経路部分が含まれる場合であっても、経験経路の不満経路部分を迂回し、且つ、不満経路部分を含む経験経路への復帰が容易な復帰容易経路を優先した経路計算を行うため、ユーザが除外キーなどのキー操作を要することなく不満な道路を除外して経路設定できる。
【0015】
請求項9記載の発明によれば、経験経路上に不満経路部分が複数に分かれて存在する場合、隣接する不満経路部分が所定の条件を満足するときには、それら不満経路部分をひとまとめにして迂回するため、不満経路部分を一つ一つ迂回するよりも移動効率の良い経路を探索できる。
【0016】
請求項10記載の発明のように、所定の条件を経験経路に隣接する不満経路部分が所定距離以内にある場合を含むようにすると良い。
請求項11記載の発明によれば、過去に移動したことがある経験経路と、当該経験経路への復帰が容易な復帰容易経路とを表示装置の表示画面に同時に表示させるため、ユーザが経験経路以外の経路を移動することで不安を生じたとしても、ユーザが表示手段の表示画面を確認するだけで直ぐに経験経路に復帰できるという安心感が得られる。
【0017】
請求項12記載の発明によれば、経験経路に渋滞区間と不満経路部分の双方が含まれる場合、渋滞区間が経験経路の不満経路部分と当該不満経路部分を除く非不満経路部分に跨って存在する場合に、不満経路部分への分岐点や経路と、前記非不満経路部分への分岐点や経路とを区別して表示させるため、ユーザは明確に認識できる。
【0018】
なお、本発明における「総コスト」とは、移動体が例えば車両の場合、ユーザが経路を運転した場合の移動に関する障害の総負荷をポイントなどの一つの指標により示したものである。例えば、出発地から目的地までの総コストは、当該出発地から目的地までの距離、通行道路の車線数、右折数、左折数、通行道路の渋滞の有無およびその程度、通行道路の車両通行規制、合流の有無やその回数、レーン変更回数などの少なくとも一部または全部の要素を、総じてポイントに置き換えてカウントした結果を示している。
【0019】
したがって、これらの総コストが高ければ例えば車両の場合には運転の負荷が高く、総コストが低ければ運転の負荷が低い。例えば車両ではなく、歩行者が所持する経路探索装置の場合であっても、出発地から目的地までの距離が長ければ移動負荷が高く総コストが高く、距離が短ければ移動負荷が低く総コストが低いため、歩行者などが経路探索装置を所持する場合でも本発明は同様に適用できる。
【図面の簡単な説明】
【0020】
【図1】本発明の第1実施形態における電気的構成を概略的に示すブロック図
【図2】リンクの定義を示す説明図
【図3】目的地までの経路探索処理、経路案内処理の一連の流れを説明するフローチャート
【図4】経路探索処理を説明するフローチャート
【図5】移動履歴情報の一例を表す図
【図6】経路探索処理の説明図
【図7】従来例の経路探索処理を説明する説明図
【図8】経路探索処理の他の態様を説明する説明図
【図9】経路探索処理における他の態様の説明図
【図10】画面表示処理を説明するフローチャート
【図11】表示画面例
【図12】本発明の第2実施形態における図4相当図
【図13】図10相当図
【図14】図11相当図
【図15】本発明の第3実施形態を示す経路探索情報、経路案内情報の送受信関係を示すシステム構成図
【発明を実施するための形態】
【0021】
(第1実施形態)
以下、本発明の経路探索装置、経路探索方法、経路案内装置、経路案内方法を車両用ナビゲーション装置の機能として構成適用した第1実施形態について図1ないし図11を参照しながら説明する。図1は、車両用ナビゲーション装置の電気的構成を概略的なブロック図により示している。
【0022】
図1に示すように、車両用ナビゲーション装置1は制御装置2を備え、当該制御装置(制御ユニット)2に、位置検出器3、地図データ入力器4、操作スイッチ群5、VICS(登録商標)受信機6、通信装置7、外部メモリ8、表示装置9、音声コントローラ10、音声認識部11、リモコンセンサ12を接続して構成される。
【0023】
リモコンセンサ12にはリモコン13が赤外線接続され、音声コントローラ10にはスピーカ14が接続され、音声認識部11にはマイク15が接続される。経路探索装置A、経路案内装置A2は、スピーカ14、マイク15、表示装置9などの報知部を具備していても具備していなくても良い。
【0024】
制御装置2は、例えばマイクロコンピュータを主体として構成されたものであり、CPU、メモリ(RAM、ROM)及びI/Oバス(何れも図示せず)を備え、各種の制御プログラムを実行して装置全体の動作を制御する。この制御装置2の内部には、経路探索部2a、経路案内部2b、表示制御部2c、推定部2dの各機能部が備えられており、経路探索装置Aおよび経路案内装置A2は、制御装置2の制御装置2が実行するソフトウェアにより実現されるものである。
【0025】
位置検出器3は、Gセンサ3a、ジャイロスコープ3b、距離センサ3c、GPS受信機3d等を備えて構成され、これらの各構成要素は互いに性質の異なる検出誤差を有している。制御装置2はこれら各構成要素から入力した検出信号を互いに補間して車両の現在位置を特定する。
【0026】
この場合、位置検出器3は、要求される検出精度で車両の現在位置を検出可能であれば、これら全ての構成要素を備える必要はなく、又、ステアリングの舵角を検出するステアリングセンサや各車輪の回転を検出する車輪センサ等が組み合わされて構成されていても良い。
【0027】
地図データ入力器4は、CD−ROM、DVD−ROM、メモリカード又はHDD等の記録媒体を装着し、地図データやマップマッチング用データ等を入力する。操作スイッチ群5は、表示装置9の周辺に配置されるメカニカルキー、表示装置9の表示画面上に形成されるタッチキーを含んで構成され、例えばユーザが何らかの操作(例えばメニュー表示選択、目的地設定、経路探索、経路案内開始、表示画面変更及び音量調整等)を行った旨を検出すると、操作検出信号を制御部2に出力する。
【0028】
VICS受信機6は、広域通信網を通じて広域通信を行い、VICSセンター装置(図示せず)から送信されたVICS情報について広域通信網を通じて受信する。外部メモリ8は、HDD等の大容量記憶装置から構成されている。
【0029】
表示装置9は、例えばカラー液晶ディスプレイにより構成され、メニュー選択画面、目的地設定画面、経路案内画面等の各種の表示画面を表示すると共に、車両の現在位置を表す現在位置マークや走行軌跡等を地図データの地図上に重ねて表示する。尚、表示装置9は、有機ELやプラズマディスプレイ装置等から構成されていても良い。
【0030】
音声コントローラ10は、例えば警告音や経路案内の案内音声等をスピーカ14から出力させる。音声認識部11は、制御部2により動作が制御され、起動状態ではマイク15から入力した音声を音声認識アルゴリズムにしたがって音声認識可能な状態とする。リモコンセンサ12は、リモコン13から送信された操作検出信号を受信すると、その受信した操作検出信号を制御部2に出力する。
【0031】
制御装置2は、地図データを取得する地図データ取得部、車両の現在位置と地図データ取得部により取得された地図データ内の道路データとを使用して車両の現在位置が存在する道路を特定するマップマッチング部、マップマッチング部により特定された車両の現在位置からユーザにより設定された目的地までの経路を探索する経路探索部2a、経路探索部により探索された経路及び地図データ内の道路データや交差点の位置データ等に基づいて経路案内に必要な地点を算出して経路案内する経路案内部2b、車両の現在位置周辺の地図や高速道路の略図や交差点付近の拡大図等を描画する表示制御部2c等を備えている。制御装置2の経路探索部2aが経路探索手段として機能し、経路案内部2bが経路案内手段として機能し、表示制御部2cが表示制御手段として機能する。
【0032】
図2は、地図データとして記憶される道路データの概要を示している。
地図データは、各交差点Cの中央に設定されるノードNや、このノードN間を結合するリンクLを含んだ道路データにより構成される。例えば、片側一車線の直線道路では、図2に示されるように、車両Caが左側通行している場合を考慮すると、各交差点Cの中央に設定されたノードN間を結合するリンクLが道路幅方向の中央に設定されている。
【0033】
このリンクLには、複数のノードN間を結合する間に複数の形状点が設定されており、当該複数の形状点に対応して形状データ(例えば幅、高さ等)が設定されており、当該形状データに応じた道路データが記憶されている。複数のリンクLは、それぞれリンクID(リンク識別情報)が付されており、交差点Cを結合する道路毎にそれぞれ異なるID(識別情報)が付された状態で管理されている。
【0034】
前記構成において、ユーザが迷いを生じることなく出発地と目的地との間の経路を設定できるようにすることを目的とした実施形態を示す。
図3は、制御装置が行う経路案内処理をフローチャートによって示している。まず、操作スイッチ群5のユーザ操作により目的地が設定される(S1)。目的地が設定されると、制御装置2は、出発地(現在位置)から目的地に至るまでの経路探索処理を行う(S2)。
【0035】
図4は、経路探索処理をフローチャートにより示している。まず、経路探索処理において、制御装置2は現在位置から目的地までの経路について経路探索し(T1)、過去に走行したことのある経験経路か否かを判定する(T2)。このステップT2において、制御装置2は移動履歴情報を参照し、ステップT1において探索した経路の一部に過去に走行したことのある経験経路が含まれるか否かを判定する。
【0036】
図5は、移動履歴情報の一例を示している。移動履歴情報は、車両Caの制御装置2がメモリ内に記憶する情報であり、移動軌跡情報、また、必要に応じて移動体の動作情報を含む。移動軌跡情報は、出発地情報(出発地座標、出発地出発時刻)、目的地情報(目的地座標、目的地到着時刻)、出発地から到着地までの座標点列、出発地〜到着地に至るまでに通過(出発/到達)するリンクLの識別情報(リンクID列:通過経路情報)、さらに、出発地〜到着地に至るまでに通過(出発/到達)するノードNの識別情報、を示している。移動体の動作情報は、車両Caの方向指示器を操作した方向指示器操作情報(開始座標、終了座標)、アクセル/ブレーキ操作に伴う急減速動作を示した急減速地点情報(座標、時刻)などを示している。なお、移動体の動作情報は、移動軌跡情報と関連付けがなされていると良い。
【0037】
図4に示すように、制御装置2は、ステップT2において、過去に走行したことのある経験経路が含まれない(T2:NO)と判定したときには、通常の経路探索を行った経路探索結果を出力して前述の経路案内処理に戻るが、ステップT2において、過去に走行したことのある経験経路が含まれる(T2:YES)と判定したときには、下記のステップT4〜T9に示す渋滞回避処理を行う。これらの処理では、制御装置2は、今回の経路探索時の経験経路部分における総コストを算出し(T4)、一方、過去(例えば前回)の経路探索時の当該経験経路部分における総コストを算出する(T5)。
【0038】
この「総コスト」とは、車両Caの場合、ユーザがある定められた経路を運転した場合の障害の総負荷をポイントなどの一つの指標により示したものである。例えば、出発地から目的地までの総コストは、当該出発地から目的地までの距離、通行道路の車線数、右折数、左折数、通行道路の渋滞の有無およびその程度、通行道路の車両通行規制、合流の有無やその回数、レーン変更回数などの少なくとも一部または全部の要素を、総じてポイントに置き換えてカウントした結果を示している。したがって、これらの総コストが高ければ、運転の負荷が高く、総コストが低ければ運転の負荷が低い。また、ここで言う過去の経路探索時の総コストは、今回の経路探索から遡って1回目の前回の経路探索時の総コストであっても良いし、過去に走行した複数回の経路探索時の総コストの平均であっても良い。
【0039】
そして、制御装置2は総コストの差を算出する(T6)。制御装置2は、ステップT4およびT5にて算出された総コストの差が所定値以下であると判定すると(T7:NO)、探索経路をそのまま出力する。これは、現時点で、経験経路上に何も渋滞(障害)を生じていない、もしくは、渋滞を生じていたとしても微々たる渋滞と判定したことを示しており、この場合、探索経路をそのまま出力することで、ユーザが過去に走行したことがある経験経路をそのまま案内する。すると、ユーザは安心感が保たれる。
【0040】
他方、制御装置2は、ステップT4およびT5にて算出された総コストの差が所定値を超えると判定すると(T7:YES)、現時点で、経験経路上に渋滞(何らかの障害)が発生している、もしくは、渋滞の発生が予測されることを判断する。
【0041】
この場合、制御装置2は、経験経路の周辺の迂回経路で且つ経験経路への復帰が容易な復帰容易経路を優先して経路探索を行う(T9)。ここで、経験経路の周辺の迂回経路を探索する理由は、渋滞(障害)の回避が可能なためであり、しかも経験経路が近くに存在するためである。この場合、渋滞の存在する経路が予め判明している場合には、当該渋滞の存在する経路部分のみ経験経路の周辺の経路を探索すると良い。すると、経験経路の一部分のみ回避するだけで、渋滞を回避することができる。例えば、経験経路の一部が混雑しており、そこが結果的にコストアップを招いているため、混雑部分に限定して迂回すると良い。
【0042】
より好ましくは、経験経路部分を細分化(ノード、リンク単位に細分化)し、各ノード間、あるいはリンク単位での旅行時間(走行した場合にかかる時間の実績と予測値)を前回実績と今回探索時で比較し、旅行時間に一定時間以上の乖離があるノード間群、リンク群を迂回するようにすると良い。
【0043】
例えば、経験経路がリンクA、B、C、D、Eを直列したものであった場合に、各リンク毎の旅行時間を前回の実績と今回の探索結果とで比較する。今回の探索結果では、例えば、VICS受信機6により取得する交通情報の中に、当該リンクに関する予測旅行時間が含まれているものとする。そして比較の結果、仮に、リンクB、Cでの予測旅行時間が前回の旅行時間の実績に比べ一定以上増加していると判断された場合には、経験経路周辺で、リンクB、Cだけを迂回する経路であって、リンクA〜Eの全てに対して復帰容易な経路を優先した経路探索を行うようにすると良い。
【0044】
これによれば、ユーザは経験経路の中でも、混雑している問題のある部分だけを迂回でき、かつなるべく経験経路を走行できるような経路が案内されるので、より安心感が得られる。また、迂回路に不安を感じた場合も、経験経路に容易に復帰できるため、安心感がある。
【0045】
また、制御装置2は、ステップT9において経験経路への復帰が容易な復帰容易経路を優先して経路探索を行うが、「過去に走行した経験経路への復帰が容易な復帰容易経路」とは以下の(1)〜(3)のうち少なくとも何れか一つの条件を満たした経路とすると良い。
【0046】
(1)経験経路に復帰するための交差点または分岐点が所定点より多い道路
(2)経験経路の離脱点から過去に走行した経験経路への復帰点までの距離が所定距離より短い道路
(3)交差点、または、分岐点までの距離が短い道路
図6(a)、図6(b)は本実施形態の経路探索処理の説明図を示している。例えばユーザが出発地(S)から目的地(G)の経路探索を行う場合に、所定の探索優先条件(例えば、幹線道路優先、距離優先など)に応じて図6(a)に示す経路Raを探索した場合を考慮する。この場合、Raはその全ての部分が過去に走行したことのある経験経路であると仮定する。この経験経路Raを迂回するために経路を変更した場合には、ステップT9において経験経路Raの周辺の復帰容易経路Rcを探索する。
【0047】
この場合、前述の(1)〜(3)の条件のうち(1)の条件は、図6(b)に示す例では、復帰容易経路Rcから経験経路Raに復帰するための交差点や分岐点が多い経路を選択すると良いことを示している。
【0048】
また、(2)の条件は図6(b)に示す例では、経路Raから経路Rcに離脱した離脱点P1から経路Raに復帰するまで復帰点P2(またはP3〜P5の何れか)までの距離が所定距離より短いと良いことを示している。また、(3)の条件は図6(b)に示す例では、離脱点P1から交差点(または分岐点)C1〜C4までの距離が所定距離より短い経路であると良いことを示している。
【0049】
これらは、経路Rcが過去に走行したことがある経験経路Raに戻り易い経路であれば、ユーザは経路Rcを走行中においても安心感を保つことができるためである。また、経路Rcがユーザにとって初めて走行する未経験道路であるときには新規な経路を開拓することができ、ユーザの道路知識も増すという効果を奏する。
【0050】
また、過去に走行した経験経路Raに近い道路の特徴部分(例えば、道路種別(国道、県道、市道などが同じ)、道路幅、道路のレーン数、合流の有無、分岐方法などが同じまたは同等)を有する類似経路を優先的に選択したり、経験経路Raの特徴(右左折数またはレーン変更回数が同じまたは同等)を有する類似経路を優先的に選択すると良い。このような場合、ユーザは類似道路の走行経験を活かして道路を走行することができる。
【0051】
図7は、従来例の経路探索処理の説明図を示している。図7に示すように、ユーザが例えばこの経験経路Raを迂回するために探索優先条件を変更した場合には経験経路Raとは全く別の経路Rbが探索されてしまうことが多い。すると、ユーザはこの経路Rbに不安を抱くこともある。そこで、本実施形態では、前述した図6を用いて説明した経路探索処理を適用しているものであり、経路探索処理を行った結果、所定の探索優先条件を適用した場合の探索経路Raの大部分を利用し、一部分だけ周辺経路Rcを適用した経路を探索結果として出力するものである。
【0052】
以下、他の例を示す。
この別経路(復帰容易経路)の算出については、以下のようにもできる。以下の例では複数経路が候補となった場合について、図8、図9を参照して説明する。ここでは経験経路を迂回する復帰容易経路の候補として別経路A〜Cが抽出されている。このとき、この別経路候補から最適なものを選択してユーザに提示するため、制御装置2では別経路A〜Cに対してコスト計算を行い経路比較する。コストは、経験経路に復帰するための分岐点の数に関連するコストαと、復帰するまでの距離に関連するコストβを加算した総コストγをそれぞれ算出し、総コストγが最小となる経路を選択するようにする。図9には、別経路A〜C毎に算出されたコストα、コストβ、総コストγのテーブルを示している。
【0053】
コストαは具体的には、分岐点数の逆数を用いて所定の係数に当該逆数を乗算して算出される。すなわち、分岐点数が多ければそれだけコストαの値は減少するようになる。また、コストβは具体的には、まず、当初経路からの離脱点P1から各復帰点Pkまでの距離に夫々所定の重み係数を乗じた値を累積する。さらに離脱点P1から各分岐点までの距離に夫々所定の重み係数を乗じた値を累積し、その最大値または平均値を求める。そして両コストα、βの加算値を総コストγ算出することで求められる。
【0054】
このようにして、最も総コストγの低い別経路を特定してユーザに提示する。提示された別経路は、復帰のための選択肢に富み、かつ、復帰までの距離(時間)が短いものであるため、経験経路への復帰が特に容易である。そのため、ユーザはより安心感の得られる迂回路を得られる。
【0055】
また、総コストγは所定値(第2の所定値に相当)以下となるようにするとよい。すなわち、複数の別経路候補が抽出された場合でも、各経路がいずれも復帰しにくい経路である(総コストが所定値を超える)場合には、ユーザに安心した別経路を提示できない虞があるため、総コストを比較した結果、最もコストの低い経路であってもそのコスト値が所定値を超えた場合には、別経路を破棄して経験経路(当初経路)を選択するとよい。そして、好ましくは、ユーザに対して、例えば「現在、走ったことのある道が一番適切です。そのルートを案内します」などと報知する。
【0056】
このようにすれば、ユーザは、過去に移動した経路での安心感を得られる一方、(経験経路に復帰容易とはいえ)不安な別経路を開拓するという迷いをなくすことができる。
なお、別経路候補A〜CはP1から各復帰点Pkまでの距離の中で、最大値(最も遠い復帰点までの距離)が所定距離値以内であるような経路であると好ましい。また別経路候補A〜Cは、P1から各分岐点までの距離の中で、最大値(最も遠い分岐点までの距離)が所定距離以内であるような経路であると好ましい。
【0057】
このような経路であれば、経験経路復帰までの距離が短いので、ユーザは安心感を得られる。また、コストβの算出には離脱点P1から分岐点までの距離を採用したが、各分岐点間の距離を考慮して算出するようにしてもよい。このようにすれば、たとえばある別経路候補で離脱点P1、分岐点1、分岐点2の順に構成される経路の場合、離脱点P1から分岐点2までの距離は短いが、分岐点1から分岐点2までの距離がとても長いといったような場合にはコスト値を上げることにつながるため、よりユーザが安心できる最適別経路を選択することに貢献できる。
【0058】
さらに、経験経路の一部に迂回対象部分(例えば、渋滞)が存在し、別経路(迂回路)として経験経路の迂回対象部分以外から離脱し、復帰するような経路が候補として探索された場合には、前記第2の所定値はその渋滞によって増加するコスト値を超えないようにすると好適である。
【0059】
このようにすれば、経験経路よりも迂回路が案内されるため、ユーザの経験経路に復帰が容易な別経路を開拓でき、一方、より安心感はあるものの混雑により大幅に損失をこうむる経験経路を選択する迷いをなくすことができる。
【0060】
さて、図4に示す経路探索処理が終了すると、制御装置2は、図3に戻って目的地に到達する(S5:YES)まで、画面表示処理を行い(S3)ながら経路案内処理を行う(S4)。画面表示処理では、制御装置2は、実際に走行している経路を主として表示装置9の表示画面に表示制御する。具体的には、制御装置2は、経路Raを走行中は経路Ra、経路Rcを走行中は経路Rcを表示装置2の表示画面に表示制御する。
【0061】
図10は、画面表示処理を概略的なフローチャートにより示している。
この図10に示すように、ステップT9を処理したか否かを判定し(U1)、当該条件を満たさない場合(U1:NO)は、通常の画面表示制御を行い(U2)、この条件を満たした場合には(U1:YES)、経験経路Raと復帰容易経路Rcとを同時に表示装置2の表示画面に表示制御する。
【0062】
図11は、表示装置9の表示画面の具体例を示している。この図9に示すように、制御装置2は、過去に走行したことがある経験経路Raと同時に現在走行中の復帰容易経路Rcとを車両Caの現在位置と共に表示装置9の表示画面に表示制御する。例えば、図9に示すように、車両Caが復帰容易経路Rcを走行中であるときに、ユーザは復帰容易経路Rcを走行して次の交差点C1において右折すれば直ぐに経験経路Raに戻ることが可能であることを確認できる。
【0063】
本実施形態によれば、過去に走行したことがある経験経路Raを再度探索するときに、当該経路Raに渋滞が発生したり、当該渋滞の発生が予想されたとしても、今回の経路探索時の総コストから過去の経路探索時の総コストを減算した結果が所定値を超えるときには、経験経路Raの周辺の経路で且つ経験経路Raへの復帰が容易な復帰容易経路Rcを優先した経路探索を行うため、ユーザは直ぐに経験経路Raに復帰できるという安心感を得られるようになり、ユーザの迷いを軽減することができる。
【0064】
復帰容易経路は、今回の経験経路探索時の総コストを増加させた経験経路部分を迂回する経路であるため、総コストを増加させた原因となる渋滞区間を回避することができる。
経験経路への復帰が容易な復帰容易経路を、(1)当該復帰容易経路から経験経路に復帰するための交差点または分岐点が所定点より多い道路、(2)復帰容易経路から経験経路に復帰するまでの距離が所定距離より短い道路、の少なくとも何れか一つの条件を満たす経路としているため、直ぐに経験経路に復帰可能な経路を選定することができる。
【0065】
復帰容易経路を探索するときには、(1)を含む道路で交差点または分岐点が所定点より多ければ多いほどその道路のコストを低くし、(2)を含む道路では距離が短いほどその道路のコストを低くして、経路のコストの積算を行い、最もコストの低い経路を復帰容易経路の探索結果として出力するため、コストを低くした復帰容易経路を導出することができる。
【0066】
復帰容易経路における経路探索時の総コストが第2所定値を超えないように迂回路を探索するが、この場合、最もコストの低い探索経路であっても第2所定値を超えた場合には迂回路を破棄して経験経路を採用するため、迂回路を破棄することでユーザの迷いをなくすことができる。
【0067】
迂回対象部分が経験経路の一部を占めている場合には、経路探索手段は迂回対象部分以外の経験経路から離脱し再び迂回対象部分以外の経験経路へと接続するような復帰容易経路を探索し、第2所定値を迂回対象部分の今回の探索時におけるコストより小さい値としている。このように処理することで、経験経路よりも迂回路が案内されるため、ユーザの経験経路に復帰が容易な別経路を開拓でき、一方、より安心感はあるものの混雑により大幅に損失をこうむる経験経路を選択する迷いをなくすことができる。
【0068】
また、制御装置2は、経験経路Raと、経験経路Raへの復帰が容易な復帰容易経路Rcとを表示装置9の表示画面に同時に表示制御するため、ユーザが経験経路Ra以外の経路を走行することで不安を生じたとしても、ユーザが表示装置9の表示画面を確認するだけで直ぐに経験経路Raに復帰できるという安心感を抱くことができる。しかも、ユーザが未経験の道路である場合には、ユーザは新規の道路を開拓できるという格別な効果も奏する。
【0069】
(第2実施形態)
図12ないし図14は、本発明の第2実施形態を示すもので、前述実施形態と異なるところは、ユーザが過去に走行した経路に不満などが存在する場合に除外キーなどのキー操作を要することなく不満な道路を除外できるようにしたところにある。前述実施形態と同一または類似の部分については同一符号を付して説明を省略し、以下、異なる部分について説明する。
【0070】
図12は、図4に代わる経路探索処理のフローチャートを示している。この図12に示すように、制御装置2は経路探索を行い(V1)、過去に走行したことのある経験経路Raであるか否かを判定し(V2)、経験経路Raでなければ(V2:NO)、通常の経路探索を行い(V3)終了する。制御装置2は、ステップV1において経路探索を行った結果、過去に走行したことのある経験経路Raの場合には(V2:YES)、経験経路Raに不満経路部分Rdを推定し当該不満経路部分Rdが含まれるか否かを判定する(V4)。このとき、不満経路部分Rdが含まれていなければ(V4:NO)、探索経路をそのまま出力して(V5)終了するが、不満経路部分Rdが含まれていれば(V4:YES)、不満経路部分Rdを除外し且つ復帰容易経路Rcを優先した経路探索を行う(V6)。すなわち、この復帰容易経路Rcは、不満経路部分Rdを迂回し、不満経路部分Rd以外の経験経路Ra(あるいは経験経路Raに不満経路部分Rdしかない場合には未経験経路)に接続する経路であって、かつ、この復帰容易経路Rcを選択したとしても、不満経路部分Rdを含む経験経路Raに簡単に復帰できるような経路である。
【0071】
ここで、ステップV4における不満な経路の判定処理は、移動履歴情報から道路の特徴や経路の特徴毎の走行経験数をカウントし、経験カウント数が所定値に満たない場合にユーザが不満のある経路であると推定して判定すると良い。
【0072】
制御装置2は、前記した移動履歴情報を車両Caの走行中には常に収集し、地図データ入力器4の地図データから車両Caが移動した道路の特徴ごと、経路の特徴ごとに経験回数をカウントする。制御装置2は、道路ごと、経路ごとの経験回数N2が所定値N1に満たない場合(すなわちN2<N1)には、その道路特徴、経路特徴を克服する移動スキルが十分ではないため、不満があると判断する。なお前記の「道路の特徴」とは、車線数、道路幅、道路種別(高速道路、自動車専用道、幹線道路、細街路等)を示しており、車両Caが移動した道路の特徴ごとに経験回数をカウントするものである。
【0073】
同様に、制御装置2は、移動軌跡情報と地図データと方向指示器操作情報とを照合することで右折、左折、合流、レーン移動等の行動を行ったか否かを判断し、これにより経路の特徴ごとの経験回数もカウントし移動スキルを判断する。この「経路の特徴」とは、右折、左折、道路の合流、レーン移動、難交差点(例えば5以上の道路が交差する交差点)等を示している。
【0074】
また、不満な経路の特定(推定)は、次に示すように行っても良い。生体情報(脳波、発汗、体温等)により感情を検知するBMI(Brain-machine Interface)技術等を用いて不快な感情を検知した場合、現在位置情報を取得して地図データ入力器4から入力される地図データと照合し、道路の特徴や経路の特徴や車両情報を総合的に判断し、不満が存在する経路であるか否かを判定する。このようにして不満な経路の特定(判定)を行っても良い。
【0075】
すなわち、ユーザが車両Caに搭乗して走行するときに嫌悪感を抱く道路は、例えば、車両通行量の多い道路、通行料金の高い道路、歩行者数が多い道路、など、ユーザの生活環境や嗜好によって様々変化するが、この場合、このような道路の走行回数が激減するため、道路や経路の経験カウント数や生体情報検知技術を用いて不満な経路であるか否かを判定すると良い。この技術を適用することで、よく通行している道路の不満な道路部分を避けて走行することができる。
【0076】
経路探索処理が終了すると、制御装置2は、ステップS3の画面表示処理を行う。本実施形態では、図13に示す画面表示処理を行う。この画面表示処理では、ステップV6を処理していなければ(W1:NO)、通常の画面表示を行い(W2)、ステップV6を処理していれば(W1:YES)、経験経路Raと復帰容易経路Rcとを同時に表示する(W3)。
【0077】
図14(a)〜図14(b)は、制御装置2による表示制御内容を示している。これらの図14(a)〜図14(b)では、過去に走行したことがあるものの不満経路部分Rdを含む経験経路Raと同時に走行中の復帰容易経路Rcとを車両Caの現在位置と共に表示装置9の表示画面に表示している。図14(a)、図14(b)中、経験経路Raと不満経路部分Rdの重なっている部分と、経験経路Raであるものの不満経路部分Rdではない部分とは、表示態様を異ならせている。例えば、RaおよびRdが重なっている部分の表示は「赤色」の道路表示とし、RaのみでRdが重なっていない部分の表示は「青色」の道路表示とする。
【0078】
例えば、図14(a)に示すように、車両Caが復帰容易経路Rcを走行中であるときに、ユーザは復帰容易経路Rcを走行して次の交差点C1にて右折すれば、不満経路部分Rdの道路を通行することなく直ぐに経験経路Raに戻ることが可能であることを確認できる。すると、過去に走行したことがある経験経路Raと現在の車両Caの位置との関係の把握が容易になり、また、過去に走行した経験経路Raに変更することが道路Yを走行することで容易であるという安心感を抱きながら復帰容易経路Rcを走行できる。
【0079】
また、図14(b)に示すように、経験経路Raが全て不満経路部分Rdであっても、ユーザは復帰容易経路Rcを走行して次の交差点C1にて右折すれば、不満経路部分Rdを含む経験経路Raに戻ることが可能であることを確認できる。この場合は、とりわけユーザが復帰容易経路Rcを走行する際に大きな不安を持つ場合であり、不満経路部分Rdであっても過去に走行した経験経路Raに簡単に復帰できるため、この場合でも安心感が得られる。また特に復帰容易経路Rcがユーザにとって初めて走行する道路であるときには新たな経路を開拓することができユーザの道路知識も増す。
【0080】
本実施形態によれば、過去に走行したことがある経験経路Raを再度探索したときに、ユーザの行動からユーザの移動経路の中で不満を感じた不満経路部分を推定し、過去に移動した経験経路Raに不満経路部分が含まれる場合に、経験経路Raの不満経路部分を除外し、且つ、経験経路Raへの復帰が容易な復帰容易経路Rcを優先した経路探索を行うため、除外キーなどのキー操作を要することなくユーザが不満な道路を除外できるようにできる。
【0081】
しかも、制御装置2は、過去に走行したことがあるものの不満経路部分となる経験経路Raと同時に走行中の復帰容易経路Rcとを車両Caの現在位置と共に表示装置9の表示画面に表示制御するため、過去に走行したことがある経路Raと現在の車両Caの位置との関係の把握が容易になり、また、過去に走行した経路Raに変更することが容易であるという安心感を抱きながら経路Rcを走行することができる。
【0082】
(第3実施形態)
図15は、本発明の第3実施形態を示すもので、前述実施形態と異なるところは、経路探索装置が移動体の外部に設置されており、当該経路探索装置から車両に搭載された移動支援端末装置に経路探索情報を送信しているところにある。前述実施形態と同一または類似機能を有する部分については同一符号を付して説明を省略し、以下、異なる部分について説明する。
【0083】
前述実施形態にて説明した経路探索装置Aがナビゲーション装置1内に搭載された例を示しているが、この経路探索処理をその外部のセンター装置20で実行し、その経路計算結果を基地局21を通じて移動支援端末装置22に転送する例を示す。
【0084】
この場合、車両Caには移動支援端末装置22が搭載されており、当該移動支援端末装置22はセンター装置20との間で無線通信処理を行う通信装置(図示せず)を搭載している。この移動支援端末装置22は、センター装置20との間で基地局21を通じて無線通信接続し、出発地、経由地、目的地等の経路条件を送信する。そして、センター装置20は、前述した経路探索処理(例えば図4の処理)を行い、前述した総コストの条件を満たすか否かを判定し、条件を満たす経路情報を移動体Caの移動支援端末装置22に配信する。車両Ca側では移動支援端末装置22が車両Caの移動支援を行う。
【0085】
本実施形態によれば、経路探索装置Aが車両Caの外部に設置されており、経路探索装置Aから移動支援端末装置22に経路探索情報を送信しているため、車両Caの搭乗者であるユーザは前述実施形態とほぼ同様の恩恵を受けることができる。なお、移動支援端末装置22は前述実施形態のナビゲーション装置1との間で電気的接続(例えばLAN接続)されていても良いし、ナビゲーション装置1自体が移動支援端末装置22として構成されていても良い。
【0086】
車両Ca側の移動支援端末装置22が、前述実施形態に示した移動履歴情報を収集する移動履歴情報収集機能を備えていても良い。移動支援端末装置22はこの移動履歴情報収集機能により得た情報をセンター装置20に送信しセンター装置20が経路探索する。このような移動履歴情報は、ユーザがたとえ車両Caを売買したとしても、センター装置20側ではユーザ毎に恒久的に保存可能なデータとなる。したがって、ユーザが車両Caを乗り換えたとしても、センター装置20が移動履歴情報を集中管理できるため、ユーザは意識することなくユーザは前述実施形態とほぼ同様の恩恵を受けることができ、特に有効な経路探索処理形態となる。また、この移動履歴情報は膨大な情報量となるため、移動支援端末装置22側で処理負荷が膨大となり処理し切れない場合であっても、本実施形態の経路探索処理形態は特に有効な処理形態となる。
【0087】
(他の実施形態)
本発明は、上記実施形態に限定されるものではなく、例えば、以下に示す変形または拡張が可能である。
例えば、上述した図8のステップU3、図13のステップW3のような表示を行う場合、第1実施形態と第2実施形態の内容が両立する場合も当然考えられる。すなわち、経験経路Ra上の渋滞区間と不満経路部分Rdの双方が予め分かっているときには、以下のような表示を行うこともできる。
【0088】
つまり、その渋滞区間が経験経路Raの不満経路部分Rdと非不満経路部分に跨って存在する場合には、復帰容易経路Rcと復帰可能な経験経路Raを同時に表示すると良いが、この場合、不満経路部分Rdへの復帰ポイント(分岐点)や経路と、非不満経路部分への復帰ポイントや経路とを区別して表示する(後者を推奨するような表示や、色、大きさなどの表示様態を異ならせた表示とする)ことが好ましい。これは、ユーザによってはどうせ復帰するのであれば、不満のない経験経路Raに復帰することがより安心感を抱く場合もあると考えられるからである。
【0089】
また、経験経路に不満部分が複数離散的に点在するような場合、異なる不満部分の距離が所定距離以内であるようなときには、それら複数の不満部分を一つの群とみなして迂回するように別経路を探索してもよい。
【0090】
このようにすれば、不満部分どうしが近接している場合に、それら不満部分をいちいちひとつずつ迂回するような経路(不満部分を迂回して復帰しても、すぐに次の不満部分を迂回するために、走りなれた経験経路を離脱しなくてはならないような経路)を探索することがなくなり、ユーザがより安心感を得られる。
【0091】
また、前述実施形態に示した経路変更処理態様に限られず、経験経路Raの全部を対象としても、経験経路Raの一部を対象として復帰容易経路Rcに変更する経路探索を行っても良い。
【0092】
移動体として車両Caに適用した実施形態を主に示しているが、移動体は歩行者であっても良いことは言うまでもなく、経路探索装置A、経路案内装置A2は移動体に搭載されたものに限定されるわけではなく、移動体用に携帯可能なネットブック(パーソナルコンピュータ)、インターネットテレビ、携帯電話機、スマートフォン、電子書籍端末、携帯ゲーム機等の移動体用の各種装置に適用できる。
【0093】
歩行者が所持する経路探索装置A、経路案内装置A2の場合であっても、出発地から目的地までの距離が長ければ移動負荷が高く、距離が短ければ移動負荷が低いため、歩行者などが経路探索装置A、経路案内装置A2を所持する場合であっても本発明は同様に適用できる。
【符号の説明】
【0094】
図面中、2は制御装置、Aは経路探索装置、A2は経路案内装置、2aは経路探索部(経路探索手段)、2bは経路案内部(経路案内手段)、2cは表示制御部(表示制御手段)、2dは推定部(推定手段)を示す。
【特許請求の範囲】
【請求項1】
過去に移動したことがある経験経路を少なくとも一部含む経路を探索するときに、今回の経験経路探索時の総コストから過去の経験経路探索時の総コストを減算した結果が所定値を超える場合、
前記経験経路を迂回する前記経験経路周辺の迂回経路であって、且つ当該経験経路への復帰が容易な復帰容易経路を優先した経路探索を行う経路探索手段を備えたことを特徴とする経路探索装置。
【請求項2】
前記復帰容易経路は、今回の経験経路探索時の総コストを増加させた経験経路部分を迂回する経路であることを特徴とする請求項1記載の経路探索装置。
【請求項3】
前記経験経路への復帰が容易な復帰容易経路とは、(1)当該復帰容易経路から経験経路に復帰するための交差点または分岐点が所定点より多い道路、(2)前記復帰容易経路から経験経路に復帰するまでの距離が所定距離より短い道路、の少なくとも何れかを含む経路であることを特徴とする請求項1または2記載の経路探索装置。
【請求項4】
前記経路探索手段が、前記復帰容易経路を探索するときには、前記(1)を含む道路で交差点または分岐点が所定点より多ければ多いほどその道路のコストを低くし、(2)を含む道路で距離が短いほどその道路のコストを低くして、経路のコストの積算を行い、最もコストの低い経路を復帰容易経路の探索結果として出力することを特徴とする請求項3記載の経路探索装置。
【請求項5】
前記経路探索手段は、前記復帰容易経路における経路探索時の総コストが第2所定値を超えないように復帰容易経路を探索し、
最もコストの低い探索経路であっても第2所定値を超えた場合には前記復帰容易経路を破棄して経験経路を採用することを特徴とする請求項4記載の経路探索装置。
【請求項6】
前記経路探索手段は、迂回対象部分が経験経路の一部を占めている場合には、前記迂回対象部分以外の経験経路から離脱し再び迂回対象部分以外の経験経路へと接続するような復帰容易経路を探索し、
前記第2所定値は、前記迂回対象部分の今回の探索時におけるコストより小さい値であることを特徴とする請求項5記載の経路探索方法。
【請求項7】
ユーザの行動からユーザの移動経路の中で不満を感じた不満経路部分を推定する推定手段と、
過去に移動したことがある経験経路を少なくとも一部含む経路を探索するときに、
過去に移動した経験経路に前記推定した不満経路部分が含まれる場合、当該経験経路の不満経路部分を迂回し、且つ、前記不満経路部分を含む経験経路への復帰が容易な復帰容易経路を優先した経路探索を行う経路探索手段と、を備えたことを特徴とする経路探索装置。
【請求項8】
前記経験経路への復帰が容易な復帰容易経路とは、当該復帰容易経路から経験経路に復帰するための交差点または分岐点が所定点より多い道路、前記復帰容易経路から経験経路に復帰するまでの距離が所定距離より短い道路、の少なくとも何れかを含む経路であることを特徴とする請求項7記載の経路探索装置。
【請求項9】
前記経路探索手段は、前記経験経路上に前記不満経路部分が複数に分かれて存在する場合、隣接する不満経路部分が所定の条件を満足するときには、それら不満経路部分をひとまとめにして迂回するように経路を探索することを特徴とする請求項7または8記載の経路探索装置。
【請求項10】
前記所定の条件とは、経験経路に隣接する不満経路部分が所定距離以内にある場合を含むことを特徴とする請求項9記載の経路探索装置。
【請求項11】
請求項1ないし10の何れかに記載の経路探索装置を適用して経路案内する経路案内装置であって、
過去に移動したことがある経験経路と、当該経験経路への復帰が容易な復帰容易経路とを表示装置の表示画面に同時に表示させる経路案内手段を備えたことを特徴とする経路案内装置。
【請求項12】
前記経路案内手段は、前記経験経路に渋滞区間と不満経路部分の双方が含まれる場合、前記渋滞区間が経験経路の不満経路部分と当該不満経路部分を除く非不満経路部分に跨って存在する場合に、探索された復帰容易経路において、前記不満経路部分への分岐点や経路と、前記非不満経路部分への分岐点や経路とを区別して表示させることを特徴とする請求項11記載の経路案内装置。
【請求項13】
過去に移動したことがある経験経路を少なくとも一部含む経路を探索するときに、今回の経路探索時の総コストから過去の経路探索時の総コストを減算した結果が所定値を超える場合、前記経験経路を迂回する前記経験経路周辺の経路であって、且つ当該経験経路への復帰が容易な復帰容易経路を優先した経路探索を行うことを特徴とする経路探索方法。
【請求項14】
ユーザの行動からユーザの移動経路の中で不満を感じた不満経路部分を推定するステップと、
過去に移動したことがある経験経路を少なくとも一部含む経路を探索するときに、過去に移動した経験経路に前記推定手段により推定された不満経路部分が含まれる場合、当該経験経路の不満経路部分を迂回し、且つ、前記不満経路部分を含む経験経路への復帰が容易な経路を優先した経路計算を行うステップとを備えたことを特徴とする経路探索方法。
【請求項15】
請求項13または14記載の経路探索方法を適用して経路案内する経路案内方法であって、
過去に移動したことがある経験経路と、当該経験経路への復帰が容易な復帰容易経路とを表示装置に表示画面に同時に表示させることを特徴とする経路案内方法。
【請求項1】
過去に移動したことがある経験経路を少なくとも一部含む経路を探索するときに、今回の経験経路探索時の総コストから過去の経験経路探索時の総コストを減算した結果が所定値を超える場合、
前記経験経路を迂回する前記経験経路周辺の迂回経路であって、且つ当該経験経路への復帰が容易な復帰容易経路を優先した経路探索を行う経路探索手段を備えたことを特徴とする経路探索装置。
【請求項2】
前記復帰容易経路は、今回の経験経路探索時の総コストを増加させた経験経路部分を迂回する経路であることを特徴とする請求項1記載の経路探索装置。
【請求項3】
前記経験経路への復帰が容易な復帰容易経路とは、(1)当該復帰容易経路から経験経路に復帰するための交差点または分岐点が所定点より多い道路、(2)前記復帰容易経路から経験経路に復帰するまでの距離が所定距離より短い道路、の少なくとも何れかを含む経路であることを特徴とする請求項1または2記載の経路探索装置。
【請求項4】
前記経路探索手段が、前記復帰容易経路を探索するときには、前記(1)を含む道路で交差点または分岐点が所定点より多ければ多いほどその道路のコストを低くし、(2)を含む道路で距離が短いほどその道路のコストを低くして、経路のコストの積算を行い、最もコストの低い経路を復帰容易経路の探索結果として出力することを特徴とする請求項3記載の経路探索装置。
【請求項5】
前記経路探索手段は、前記復帰容易経路における経路探索時の総コストが第2所定値を超えないように復帰容易経路を探索し、
最もコストの低い探索経路であっても第2所定値を超えた場合には前記復帰容易経路を破棄して経験経路を採用することを特徴とする請求項4記載の経路探索装置。
【請求項6】
前記経路探索手段は、迂回対象部分が経験経路の一部を占めている場合には、前記迂回対象部分以外の経験経路から離脱し再び迂回対象部分以外の経験経路へと接続するような復帰容易経路を探索し、
前記第2所定値は、前記迂回対象部分の今回の探索時におけるコストより小さい値であることを特徴とする請求項5記載の経路探索方法。
【請求項7】
ユーザの行動からユーザの移動経路の中で不満を感じた不満経路部分を推定する推定手段と、
過去に移動したことがある経験経路を少なくとも一部含む経路を探索するときに、
過去に移動した経験経路に前記推定した不満経路部分が含まれる場合、当該経験経路の不満経路部分を迂回し、且つ、前記不満経路部分を含む経験経路への復帰が容易な復帰容易経路を優先した経路探索を行う経路探索手段と、を備えたことを特徴とする経路探索装置。
【請求項8】
前記経験経路への復帰が容易な復帰容易経路とは、当該復帰容易経路から経験経路に復帰するための交差点または分岐点が所定点より多い道路、前記復帰容易経路から経験経路に復帰するまでの距離が所定距離より短い道路、の少なくとも何れかを含む経路であることを特徴とする請求項7記載の経路探索装置。
【請求項9】
前記経路探索手段は、前記経験経路上に前記不満経路部分が複数に分かれて存在する場合、隣接する不満経路部分が所定の条件を満足するときには、それら不満経路部分をひとまとめにして迂回するように経路を探索することを特徴とする請求項7または8記載の経路探索装置。
【請求項10】
前記所定の条件とは、経験経路に隣接する不満経路部分が所定距離以内にある場合を含むことを特徴とする請求項9記載の経路探索装置。
【請求項11】
請求項1ないし10の何れかに記載の経路探索装置を適用して経路案内する経路案内装置であって、
過去に移動したことがある経験経路と、当該経験経路への復帰が容易な復帰容易経路とを表示装置の表示画面に同時に表示させる経路案内手段を備えたことを特徴とする経路案内装置。
【請求項12】
前記経路案内手段は、前記経験経路に渋滞区間と不満経路部分の双方が含まれる場合、前記渋滞区間が経験経路の不満経路部分と当該不満経路部分を除く非不満経路部分に跨って存在する場合に、探索された復帰容易経路において、前記不満経路部分への分岐点や経路と、前記非不満経路部分への分岐点や経路とを区別して表示させることを特徴とする請求項11記載の経路案内装置。
【請求項13】
過去に移動したことがある経験経路を少なくとも一部含む経路を探索するときに、今回の経路探索時の総コストから過去の経路探索時の総コストを減算した結果が所定値を超える場合、前記経験経路を迂回する前記経験経路周辺の経路であって、且つ当該経験経路への復帰が容易な復帰容易経路を優先した経路探索を行うことを特徴とする経路探索方法。
【請求項14】
ユーザの行動からユーザの移動経路の中で不満を感じた不満経路部分を推定するステップと、
過去に移動したことがある経験経路を少なくとも一部含む経路を探索するときに、過去に移動した経験経路に前記推定手段により推定された不満経路部分が含まれる場合、当該経験経路の不満経路部分を迂回し、且つ、前記不満経路部分を含む経験経路への復帰が容易な経路を優先した経路計算を行うステップとを備えたことを特徴とする経路探索方法。
【請求項15】
請求項13または14記載の経路探索方法を適用して経路案内する経路案内方法であって、
過去に移動したことがある経験経路と、当該経験経路への復帰が容易な復帰容易経路とを表示装置に表示画面に同時に表示させることを特徴とする経路案内方法。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】

【図9】
【図10】

【図11】

【図12】
【図13】
【図14】

【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2012−107879(P2012−107879A)
【公開日】平成24年6月7日(2012.6.7)
【国際特許分類】
【出願番号】特願2010−254791(P2010−254791)
【出願日】平成22年11月15日(2010.11.15)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年6月7日(2012.6.7)
【国際特許分類】
【出願日】平成22年11月15日(2010.11.15)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]