
Fターム[5J070AF02]の内容
レーダ方式及びその細部 (42,132) | レーダの設置 (3,019) | 移動体設置 (2,312)
Fターム[5J070AF02]の下位に属するFターム
Fターム[5J070AF02]に分類される特許
121 - 140 / 190
地中探査装置
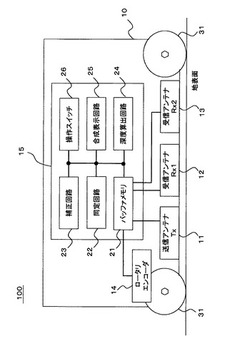
【課題】埋設物からの微弱な反射波の識別性に優れた地中探査装置を提供する。
【解決手段】地中探査装置100は、地表面を移動する台車10と、台車10に搭載され地中に探査用電磁波を放射する送信アンテナ11と、送信アンテナ11と異なる距離離間して台車10にそれぞれ搭載され埋設物からの反射波を受信する第1及び第2の受信アンテナ(12,13)と、両受信アンテナの受信信号をそれぞれ記憶するバッファメモリ21と、記憶された少なくとも一方の受信信号から埋設物の深度を算出する深度算出回路24と、両受信信号を比較し、台車10の移動方向距離と深度の両者に基づいて受信信号の埋設物同定を行う同定回路22と、同定された埋設物の両受信信号の台車移動方向偏差を深度値から補正する補正回路23と、補正された両受信信号を合成する合成表示回路25と、を備えている。
(もっと読む)
埋設物探査装置

【課題】移動方向の測定精度を向上させた埋設物探査装置を提供する。
【解決手段】埋設物探査装置100は探査用電磁波の送受に係る構成機器として、送信器11と、送信アンテナ12と、受信アンテナ13と、受信器14と、を含んでいる。また、装置100は受信器14が取得した受信信号を記憶する受信データバッファメモリ22と、装置100の一定移動距離毎にサンプリング信号を受信データバッファメモリ22に供給して、当該位置における受信信号を取り込むサンプリング回路24と、装置100の移動量を検出するロータリエンコーダ18と、サンプリング信号を補間サンプリング信号に変換する補間回路26と、サンプリング信号から所定の分割距離に対応した補間サンプリング信号を予測して出力する予測回路28と、を含んでいる。
(もっと読む)
飛しょう体及び飛しょう体誘導システム
【課題】 地上や車両等に設置された誘導管制装置が、複数ある目標を弁別することが困難な状況であっても、複数の飛しょう体は、複数ある目標のそれぞれ異なる目標に向けて誘導される飛しょう体を得る。
【解決手段】 この発明による飛しょう体は、目標を捜索するシーカと、他の飛しょう体との間で捕捉した目標の位置や速度等の情報を相互に情報伝達する通信装置と、前記通信装置を経由して他の飛しょう体から受信した前記他の飛しょう体が捕捉した目標の位置及び速度等の目標情報に基づいて、捜索範囲に前記他の飛しょう体が捕捉した目標が含まれないように前記シーカの捜索範囲を設定する信号処理部とを備えるようにした。
(もっと読む)
GPS妨害波抑制装置、及びGPS妨害波抑制システム
【課題】 未知情報である妨害波到来方向を推定する適応信号処理は、計算負荷が大きく、回路規模及び計算処理能力の増大を招くという欠点があった。
【解決手段】 自己の移動体に搭載されるGPS妨害波抑制装置であって、相手方移動体に対し妨害波を発生する妨害波発生装置から出力される妨害波発生装置の位置情報を含む妨害波対策信号を受信する通信アンテナと、GPS衛星よりGPS測位信号を受信するGPSアンテナと、GPSアンテナで受信されたGPS測位信号を用いて自己の移動体の位置情報を出力するGPS測位装置と、自己の移動体の姿勢角を求めるための角速度を計測する角速度センサと、通信アンテナで受信された妨害波対策信号とGPS測位装置から出力された自己の移動体の位置情報と角速度センサから出力された角速度を用いて妨害波到来方向を特定する妨害波到来方向特定部とを備える。
(もっと読む)
探査装置
【課題】 狭い場所においても隠蔽物を比較的容易に且つ簡単に探知することができる探査装置を提供すること。
【解決手段】 電磁波を送信する送信用アンテナ体122と、隠蔽物により反射された電磁波を受信する受信用アンテナ体124と、受信用アンテナ体124により受信した電磁波を所要の通りに処理して隠蔽物の探知信号を生成する信号処理回路130と、を具備する。信号処理回路130が内蔵された装置本体102Hと、装置本体102Hに着脱自在に取り付けられるアンテナユニット152とから構成され、送信用アンテナ体122及び受信用アンテナ体124がアンテナユニット152に配設され、装置本体102Hとアンテナユニット152とが接続部材164を介して接続される。
(もっと読む)
レイアウト・スキャンニング・システム
【課題】 バッテリーを不要として安価な確実にファシリティーの位置を確認把握できるレイアウト・スキャンニング・ システムを提供すること。
【解決手段】本システムは、探索対象ファシリティー3上に貼付されICタグ5と、ICタグ5との間で通信を行うアンテナ71を含む通信手段7と、探索対象ファシリティー3の存在する空間上部に設置され搭載しているアンテナ71を探索対象ファシリティー3上で移動させるスキャンニング機構9と、アンテナ71からのスキャン情報およびスキャンニング機構の位置情報とを基に概算位置を算出する位置算出手段13と、位置算出手段13からの概算位置とICタグ5からの情報を取り込み、ICタグ5の情報を基に、各種データベースから取り出したデータで概算位置を補正処理をしてレイアウトデータを形成する情報処理手段15とを備えたものである。
(もっと読む)
スワスSAR用の効率的なオートフォーカス方法
可動レーダは、パッチから反射された周期的なパルス反射波からパッチの探索モード合成開口画像を生成する。パッチは2以上のオーバーラップするアレイから得られるレーダ反射波から画像化される。強力な散乱体が各アレイ内で突き止められ、その後各アレイからのデータはレーダの運動と強力な散乱体に関して運動補償される。各アレイの運動補償された結果は各アレイの位相誤差を得るためにオートフォーカスされる。各アレイの位相誤差を使用して、接続された位相誤差評価が計算され、各アレイの位相誤差に加算され、アレイ間のオーバーラップで位相間の差を最小にし、アレイ間のオーバーラップ領域には位相不連続性が全く存在しないか最小であることを保証する。位相の不連続性の防止はパッチをレンダリングするアレイの組み合わせのクリアなSAR画像を生成する。 (もっと読む)
携帯型マイクロ波撮像装置及びこの携帯型マイクロ波撮像装置を使用して対象物をスクリーニングする方法
【課題】
単純且つ効率的な携帯型マイクロ波撮像装置及び方法を提供すること。
【解決手段】
対象物(150)に関連するターゲット(155)にマイクロ波照射が向かうようにそれぞれの方向係数がプログラム可能にされ、前記ターゲット(155)から反射された反射マイクロ波照射を受信するようにそれぞれの方向係数を更にプログラム可能された複数のアンテナ素子(80)を有するアンテナアレイ(50)と、前記反射マイクロ波照射の強度を測定し、当該プロセッサ(100)によって作成された前記対象物(150)のマイクロ波画像内のボクセルの値を求めるように動作可能なプロセッサ(100)と、前記アンテナアレイ(50)が内部に搭載された第1の部分(25b)と、ユーザが当該装置(10)の移動を操作することを可能とするハンドル(30)を含む第2の部分(25c)とを有する支持部(20)とを具備する。
(もっと読む)
多次元イメージ化の方法および装置
【課題】空間における反射点で反射された信号を検知することによって、これらの位置を定めるために、電磁気信号の送信を用いる方法およびシステムを提供すること。
【解決手段】本発明は、マイクロ波を用いて、反射点の位置を定めるための方法、アンテナおよびシステムである。電磁波信号が、決められた周波数で生成されて、アンテナユニットにより送信される。アンテナユニットは、送信アンテナと、主視線の方向と垂直な方向に既知の間隔に分離されており、送信された波の反射された一部を受信するように工夫されている多数の受信アンテナとを含んでいる。位相比較手段が送信アンテナおよび受信アンテナに接続されており、該位相比較手段と接続されている制御ユニットは、反射点への角度を計算すること、および該反射点への距離を計算する動作が可能である。
(もっと読む)
物体探知装置
【課題】探知対象物体の大きさや形状に関係なく探知対象物体を確実に検知することができる物体探知装置を提供する。
【解決手段】各受波期間内の受信信号のサンプリングデータを格納するメモリ43と、メモリ43に格納されている受波期間内の同サンプリングタイミングのサンプリングデータに関する標準偏差を求める標準偏差演算手段44aと、標準偏差演算手段44aにて求めた標準偏差と予め設定された閾値とを比較する比較手段44bと、比較手段44bにおいて標準偏差が閾値に達したときのサンプリングタイミングまでの各受信信号に基づいて雑音成分を求める雑音成分演算手段44cと、各受信信号から雑音成分を取り除いた信号を信号成分として求める信号成分抽出手段44dと、信号成分抽出手段44dにて抽出された信号成分に基づいて探知対象物体Obの有無を判断する判断手段44eとを備える。
(もっと読む)
電磁波イメージングシステム及び移動型電磁波照射・検知装置
【課題】コンクリート構造物の表層内部に生じたクラックや剥離などの劣化状態を、ターゲットに対する適用範囲を拡大しつつ高い空間解像度でリアルタイムによる非破壊検査を行うことを課題とする。
【解決手段】送信アンテナ12で放射されたミリ波が、媒質を透過した後にターゲットで反射し、受信アンテナ13及び検波器14により検知された反射波の強度を、ロックインアンプ3で数値化することで、コンクリート16で表面反射した反射波と、コンクリート16表層内部のミリオーダーのクラック17で散乱反射した反射波の反射強度の違いから、クラック17が検出可能になる。さらに、車輪付き筐体7でコンクリート16の表面に沿って走査することで、距離センサ8により検知した距離情報に基づいて、広範囲に渡ってコンクリート16表面の二次元画像データをリアルタイムに形成することが可能となる。
(もっと読む)
移動体管理システム及び移動体装置
【課題】任意の位置における移動体の向きを確実に把握する。
【解決手段】ショッピングカート2は、切換え部31により第1のアンテナ32を選択している状態でこの第1のアンテナから電磁波を放射し、第1のアンテナの通信エリア内の商品陳列棚に配置された位置タグと無線通信を行って位置コードを取得する。そして、取得した位置コードと第1のアンテナの配置位置を無線通信部23から通信用アンテナ29を介してサーバ1に送信する。サーバはデータベース15から位置コードに対応した位置座標を読出し、この位置座標と第1のアンテナの配置位置の関係から、ショッピングカートの現在位置及び進行方向を判断する。そして、判断した現在位置及び進行方向をショッピングカートに送信する。ショッピングカートは現在位置及び進行方向をサーバから受信し、表示部26に表示して知らせる。
(もっと読む)
位置情報検出システム
【課題】 取得したすべての絶対位置情報を一元管理することにより効率的な作業を可能とする。
【解決手段】探査対象の絶対位置情報を検出する位置情報検出システムにおいて、探査対象が存在する探査エリアに対し、それぞれ同じ周波数帯または異なる周波数帯でのレーダ探査を行い、GPS(グローバル・ポジショニング・システム)により探査対象の絶対位置情報を取得する複数のレーダユニットLと、前記複数のレーダユニットLが取得した絶対位置情報を記憶し管理する第一のコンピュータ5と、前記レーダユニットLと前記第一のコンピュータ5との間にデータ通信機能を提供する情報伝達手段6とを備え、前記情報伝達手段6により、前記レーダユニットL側からは前記絶対位置情報を拡散符号で拡散した信号が前記第一のコンピュータ5側に送信され、該第一のコンピュータ5には、受信信号を逆拡散することによりデータ復元された絶対位置情報が提供される。
(もっと読む)
物品所在検出装置
【課題】
家庭や事務所などの内で置き忘れた物品の所在を検出することができる物品所在検出装置において、無線タグの向きなどにより正確な位置が特定できないということを無くし、できるだけ無線タグの正確な位置を検出できるとともに、システムを複雑にすることなく導入コストも抑えることができるようにすることを目的とする。
【解決手段】
物品にIDを記憶した無線タグ100を付し、またフロアに固定無線タグ100を配置し、該物品およびフロア固定の無線タグからIDを読み取り、物品に付した無線タグのIDを物品名と対応させ、固定無線タグのIDを位置情報と対応させて、あらかじめ記憶しておく。物品の所在検出時には、電波の強弱を調節しながら、無線タグのIDを読み取り、読み取られた物品のIDに対応する物品名および読み取られた固定無線タグのIDに対応する位置情報を表示する。
(もっと読む)
合成開口レーダ画像表示装置
【課題】 本発明は、SAR画像中における移動目標の視認性を向上させる。
【解決手段】 移動目標信号を抽出して出力するMTI帯域制限部4で抽出された移動目標信号を予め設定された閾値レベルLを超えた信号成分を出力する検出部10を有する。
検出部10は、閾値レベルLとの比較により、クラッタ等の雑音成分や固定目標の消え残りを除去して移動目標信号を検出するとともに、検出した移動目標を必要に応じて増幅出力するように構成したので、固定目標とは明瞭に区別して表示された表示器上で、移動目標の位置や形状等を正確に把握することができる。
(もっと読む)
パラメトリックリフレクティブ技術を用いたRFIDシステム
【課題】無線周波数アンテナを用いて情報を符号化および復号するシステムおよび方法を提供すること。
【解決手段】本RFIDシステム10は、少なくとも一つ以上のインテロゲータ装置とRFIDデータタグを備える。RFIDデータタグは、基板または物体に直接形成された複数のアンテナ素子を有する。アンテナ素子は、配向と、偏波および位相情報を提供する寸法とを有しており、この情報はRFIDタグ200の符号化された情報を表している。インテロゲータ装置は領域をスキャンし、レーダーイメージング技術を用いてスキャン領域の画像を生成する。この装置は、データタグのアンテナ素子から再放射されたRF信号を受信する。データタグは画像に表されることが好ましい。再放射されたRF信号は、各アンテナ素子の偏波および位相情報を含むことが好ましく、この情報からRFデータタグ200の情報を復号するため、レーダー信号イメージングアルゴリズムを用いる。
(もっと読む)
無線通信システムと無線通信装置および測距方法
【課題】動作周波数を高く設定しなくとも、高い精度で距離を測定する。
【解決手段】クロック信号MCKの周期よりも遅延量が短い遅延素子を用いて、遅延部12から遅延クロック信号DCK-1〜DCK-5を得る。測距信号PMの送出時に、タイミング情報生成部13は、クロック信号MCKや遅延クロック信号DCK-1〜DCK-5を用いてカウント動作を開始する。応答信号PRを受信したときのカウント値に基づいて、クロック信号MCKを用いたカウント動作のカウントタイミングと応答信号PRの受信タイミングとのタイミング差TEを検出する。距離演算部16は、タイミング差TEとクロック信号MCKを用いたカウント動作での応答信号PRを受信したときのカウント値DCを用いて経過時間を算出し、この経過時間に基づいて距離を算出する。
(もっと読む)
状態検出システムおよび状態検出装置
【課題】 相対的に移動する第一の移動体と第二の移動体との間の接近、静止および離反を、送受信装置の姿勢、位置関係、周囲環境などに左右されることなく確実に検出できる状態検出システム、状態検出装置を提供する。
【解決手段】 相対的に移動する第一の移動体と第二の移動体との間における、接近、静止、離反の少なくとも1つの状態を検出する状態検出システムであって、第一の移動体に設けられ、所要の電波を送信する第一の電波通信手段1と、第二の移動体に設けられ、前記第一の電波通信手段の送信電波を受信する第二の電波通信手段2と、第二の電波通信手段で受信した電波の強度を時系列的に検出し記憶する電波強度記憶手段と、前記電波強度記憶手段に記憶された電波の強度を時系列的に複数回比較して前記第一の移動体と第二の移動体の接近、静止、離反の少なくとも1つの状態を判定する状態判定手段と、を備えた状態検出システムにより前記課題を解決する。
(もっと読む)
位置検出用タグ、位置検出装置、位置検出方法、位置検出システム
【課題】無線ICタグを用いて、位置と方位を安価に精度良く測定することが可能な位置検出システムを提供すること。
【解決手段】位置検出用タグ11を、それぞれの偏波方向が異なる複数の無線ICタグ21〜24により構成した。これら無線ICタグ21〜24のうち、位置検出装置12が送信する信号の直線偏波に対応する無線ICタグが応答してタグ番号を送信する。この応答した無線ICタグのタグ番号により、位置検出装置12の質問器32は、変換テーブル33に記憶されたデータを検索し、応答した無線ICタグに対応する位置情報(位置及び方向)を読み出し、利用者の位置及び方向を特定する。位置検出装置12から送信する直線偏波の信号は、円偏波の信号に比べて到達距離が長いため、位置検出装置12のアンテナ31と位置検出用タグ11とを離すことができる。
(もっと読む)
軌道下構造探査装置
【課題】 マクラギによる反射の影響を小さくする。
【解決手段】 軌道下構造探査装置20は、マクラギ16を備えた軌道14に沿って移動可能な台車22を有する。台車22には、軌道14の下方にむけて電波を放射する少なくとも1つの送信アンテナ10が設けてある。また、台車22には、一対の受信アンテナ12(12a、12b)が取り付けてある。送信アンテナ10と受信アンテナ12とは、軌道14に沿った方向に直列状に配置してある。また、送信アンテナ10と受信アンテナ12とは、軌道14に沿った方向に離間させてある。
(もっと読む)
121 - 140 / 190
[ Back to top ]