
Fターム[2F065CC00]の内容
光学的手段による測長装置 (194,290) | 対象物−個別例 (8,635)
Fターム[2F065CC00]の下位に属するFターム
プリント基板 (376)
フィルム;シート (476)
磁気ディスク;光ディスク (101)
ねじ (34)
歯車 (13)
鋼板 (147)
H型鋼、T型鋼 (20)
タービンブレード (54)
アンテナ (1)
工具 (120)
車両;自動車 (618)
車輪 (66)
タイヤ (136)
建築物 (337)
溶接部 (101)
人体;動物 (953)
半導体製造関連 (1,910)
光学要素 (628)
電子部品関連 (997)
付着膜;蒸着膜 (441)
エッチング (11)
トロリー線 (55)
レール (54)
磁気ヘッド (2)
炉内堆積物 (23)
路面;トンネル内面 (196)
Fターム[2F065CC00]に分類される特許
201 - 220 / 765
変位計測装置
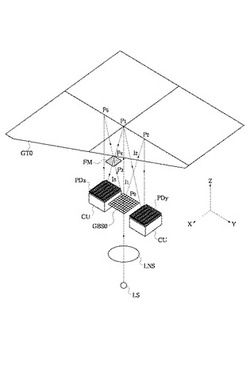
【課題】 回折格子が形成する面内の方向(Y方向)の変位及びその面に垂直な方向(Z方向)の変位を、光源から出射される光から回折格子を用いて複数の回折光を発生させることにより計測できる変位計測装置を提供する。
【解決手段】 第1乃至第3の回折光l1、l2、l3を発生させる第1回折格子GBS0と、被計測物と共に移動可能な第2回折格子GT0と、第2回折格子で回折した第1及び第2の回折光による干渉光を受光する第1受光部PDxと、第2回折格子で回折した第1の回折光と、第1回折格子を透過した第3の回折光とをそれぞれ反射する反射部FMと、反射部で反射され第2回折格子で回折した第1の回折光と、反射部で反射された第3の回折光と、による干渉光を受光する第2受光部PDzと、第1受光部で受光した光に基づいてY方向の変位を算出し、かつ第2受光部で受光した光に基づいてZ方向の変位を算出する演算部CUと、を有する。
(もっと読む)
パッケージ上の糸条幅測定方法

【課題】無撚りの糸条が綾角をなして巻回されたパッケージ上の糸条幅を、パッケージ上にて、自動かつ高精度に検出することができ、また糸条幅測定作業の時間短縮ならびに作業工数の削減を図ることができる糸条幅測定方法を提供する。
【解決手段】無撚りの糸条が綾角をなして巻回されたパッケージ3を照明し、最外層の糸条5と最外層の糸条5の下に巻回されかつ表面に露出している糸条6から反射光を受光してパッケージ3の画像を撮像するとともに、得られた画像において高光量部を特定し、該高光量部の幅を測定することで前記糸条と糸条の少なくとも一方の糸条幅を算出する。
(もっと読む)
画像処理によるパンタグラフの鉛直加速度測定装置および測定方法
【課題】小型の装置で高精度にパンタグラフの鉛直加速度を計測することが可能な画像処理によるパンタグラフの鉛直加速度測定装置および測定方法を提供する。
【解決手段】車両に取り付けたラインセンサカメラ1でパンタグラフを撮像し、画像処理部2により撮像された画像に基づいてパンタグラフの鉛直加速度を測定する装置において、画像処理部2に、ラインセンサカメラ1によって撮像したパンタグラフの測定点における画像を入力する画像入力部21と、入力された画像からなるラインセンサ画像に対して画像処理を施すことによってラインセンサ画像上のパンタグラフの位置を求めるパンタグラフ位置検出部23と、ラインセンサ画像上のパンタグラフの位置および予め設定する伝達関数およびパンタグラフの偏位位置に基づきパンタグラフのトロリ線との接触点における鉛直加速度を算出するパンタグラフ鉛直加速度算出部24とを設けるようにした。
(もっと読む)
画像形成装置
【課題】マークの位置関係の決定精度の低下を抑制することが可能な画像形成装置を提供する。
【解決手段】画像形成装置1は、形成部23と、複数のマーク81の画像を形成部に形成させる制御部61と、センサ53と、検出信号SAに含まれる複数の信号波を、マーク波WM'と、ノイズ波とに選別する選別する選別部61と、マーク波群から、ノイズ波と隣り合う信号波を除外する除外部61と、を備える。
(もっと読む)
光学トラッキングデバイスにおけるクラッチ高さ調節
コンピューターマウスなどの光学ナビゲーションデバイスにおいてクラッチ高さを管理するアーキテクチャー。マウス向けの一実施形態では、デバイスがトラッキング面からもち上げられたときにイメージセンサーへの反射光を遮ることによって、クラッチ高さを制限する機構が、下部ケースの中に成型され得る。トラッキングは、クラッチ高さ閾値を超えたときに無効にされ、デバイスが距離クラッチ高さ閾値未満にもっていかれると再度有効にされる。デバイスは、1つまたは複数の相関パラメーターに対するファームウェア制御のアルゴリズム調節を含む。D形状開口を利用するとき、ナイフエッジ(「D」形状開口の直線部分)など、形状開口の寸法特性を用いてz軸高さトラッキング距離に閾値を置いて、イメージセンサー全体に影をあてることができる。開口は、LEDからの放出光の一部分を遮るようにカスタム設計することができる。 (もっと読む)
熱交換器のチューブ抽出検査方法及び装置
【課題】フィン(13)とチューブ(12)を具備する熱交換器のコア(11)の外観検査方法及び装置を提供する。
【解決手段】フィン(13)とチューブ(12)を具備する熱交換器(10)のコア(11)の外観検査装置であって、該外観検査装置が、撮像手段(3〜5、7)と画像処理装置(2)を具備しており、撮像データを平均化処理と動的2値化処理をしてチューブの画像のみを取り出す画像処理手段と、取り出された前記チューブの画像に対して、チューブの幅方向の中心座標からなるチューブ長手方向に亘る中心軸を求める演算手段と、求められた前記中心軸を、基準値と比較することでチューブ長手方向に亘る最大変位(ΔT)を求め、前記最大変位(ΔT)が、所定の閾値(c1)以上の場合に、チューブ不良と判別する判別手段とからなる熱交換器のコアの外観検査装置。
(もっと読む)
露光方法及び露光装置、並びにデバイス製造方法
【課題】計測面の異常に起因するヘッド(例えばエンコーダ、Zセンサなど)の計測誤差、さらに動作異常の発生を効果的に抑制する。
【解決手段】露光装置の稼働中、エンコーダヘッド64〜68及びZヘッド74,76を用いてウエハステージWSTの位置を計測し、その結果に従ってウエハステージWSTを駆動制御する。これと並行して、各ヘッドの計測ビームのスケール(39Y1,39Y2等)からの戻り光の強度を計測し、該強度の対応する基準強度からのずれを、スケール上の計測ビームの照射点の位置に対して収集する。そして、収集された計測ビームの強度データを用いてスケール上面の状態を診断する。
(もっと読む)
3D−TOFカメラ装置及びそのための位置・向き較正方法
カメラ装置は、シーンのカメラ投射レンジイメージを捕捉する3D−TOFカメラと、レンジイメージを処理するイメージプロセッサを備える。イメージプロセッサは、そのハードウェア及びソフトウェアが組み込まれた位置及び向き較正ルーチンを含み、該位置及び向き較正ルーチンはイメージプロセッサにより実行されるとき、3D−TOFカメラにより捕捉されるレンジイメージ内の1つ以上の面を検出し、該1つ以上の検出面から基準面を選択し、基準面に対する3D−TOFカメラの位置及び向きパラメタ、例えば基準面上方の高さ及び/又はカメラロール角及び/又はカメラピッチ角を計算する。  (もっと読む)
(もっと読む)
卵の立体歪み計測法
【課題】卵の段階で有精卵、無精卵および雌雄を識別する方法を提供する。
【解決手段】卵が滑り落ちないように、卵との接触面をエッジ構造にした卵の大きさより小さい卵置き台を用いて、垂線に対し正負45°の角度からの卵の全輪郭を計測する。次に卵輪郭の歪みを90°異なる角度で計測し、その歪みの和と差を用いて無精卵と有精卵および雌雄の識別を行う。
(もっと読む)
基板テーブル、センサおよび方法
【課題】リソグラフィ露光装置中でパターン付き放射ビームを測定する、より正確なセンサを提供する。
【解決手段】リソグラフィ露光装置中でパターン付き放射ビームを測定するセンサは、パターン付き放射ビームを受け取る受容部分と、受容部分を介してパターン付き放射ビームの少なくとも一部分を受け取るように配置された処理部分とを含む。センサの受容部分は、基板を保持するための基板テーブル中に一体化されている。
(もっと読む)
深さ測定装置及び深さ測定方法
【課題】外部から視認することができないような穴の深さも測定可能な深さ測定装置及び深さ測定方法を提供することを目的とする。
【解決手段】深さ測定装置は、被検査物に形成された穴の一方の入口を照明する第1の光源(4)と、穴の一方の入口のテーパ状部を撮影した第1の画像を取得する第1の内視鏡(2)と、被検査物に形成された穴のテーパ状部を撮影した画像のテーパ状部に対応する領域における、その穴の半径方向の輝度勾配とテーパ状部の深さの関係を示す参照テーブルを記憶した記憶部(63)と、第1の画像から一方の入口のテーパ状部における穴の半径方向の輝度勾配である第1の輝度勾配を求め、第1の輝度勾配と参照テーブルを参照して一方の入口のテーパ状部の深さを求める深さ測定部(61)と、を有する。
(もっと読む)
ゲル状物の表面凹凸検査方法
【課題】ゲル状物の表面に形成されたなだらかな凹凸であっても検出することができるゲル状物の表面凹凸検査方法を提供する。
【解決手段】検査位置41に液晶パネル71を設け、バックライト72からの光を液晶表示部73でマスクして縞模様の照明をシャーレ2の底面11側から照射したり、面発光した状態の照明をマスクすることなくシャーレ2の底面11側から照射できるように構成する。制御装置74は、液晶パネル71を全面発光した状態でシャーレ2の平面画像を取得して画像解析することで、シャーレ2の分離壁13の延在方向を検出した後、検出した分離壁13の延在方向に合わせた縞模様を液晶パネル71に表示して、寒天3表面4での凹凸を検査する。
(もっと読む)
すす濃度測定装置
【課題】安価で、測定が簡便なすす濃度測定装置を提供する。
【解決手段】試料ガスGに測定光Iを入射させる光源2と、試料ガスGで生じた第1の角度θ1における散乱光の強度を検出する第1散乱光受光器3θ1と、試料ガスGで生じた第2の角度θ2における散乱光の強度を検出する第2散乱光受光器3θ2と、第2散乱光強度に対する第1散乱光強度の比からすす寸法を求める寸法比例式に第1散乱光受光器3θ1と第2散乱光受光器3θ2が検出した第1散乱光強度及び第2散乱光強度を代入して試料ガスG中のすす寸法を演算すると共に、第1散乱光強度又は第2散乱光強度からすす濃度を求める濃度比例式に当該受光器が検出した当該散乱光強度を代入して試料ガスGのすす濃度を演算する演算器4とを備える。
(もっと読む)
表面欠陥検査装置
【課題】ロール表面の凹凸がベルト状被検査体上にノイズとして表れることを防ぎ、高感度な検出を行う表面検査装置を提供する。
【解決手段】ベルト状の被検査体である感光体ベルト1を張架する駆動ロール2と従動ロール3と、感光体ベルト1の表面に照射光を出射する光源6と、照射光による感光体ベルト1表面からの反射光を受光するラインセンサ8と、を備えた表面欠陥検査装置において、感光体ベルト1を裏面から押圧して感光体ベルト1に張力を付与するアイドルロール対21を備え、アイドルロール対21による張力付与位置を、ラインセンサ8の受光視野Vを挟むように近接配置した。
(もっと読む)
電線端末検査装置
【課題】 ラインCCDのピクセル配列密度が低く抑えられても、サブピクセルレベルで判定できるようにして、検査精度を高くする。
【解決手段】 光源2と光感知器3との間に被検査電線端末を通し、ラインCCD4を繰り返しラインスキャンして検査を行う。その際、黒ピクセル数が初めて0でなくなる位置から所定範囲内のピクセルにおいて、黒ピクセル数の増分が最大になるピクセルを求め、その前後所定個数のピクセルにおける増分を荷重値として、ピクセルの位置番号の加重平均値を求めて電線の先端位置を判定する。さらに、ストリップ位置より後方の部分について、検出されたデータ群を、ピクセル単位で前後に順次ずらせ、それぞれの位置で、基準データ群との一致度を算出して、一致度が最大となるずれ量を求める。さらに、その前後各1ピクセル分ずらした場合の一致度及びずれ量をも用いて、サブピクセルレベルでのずれ量を求め、防水シール挿入位置を判定する。
(もっと読む)
真直度測定方法および真直度測定装置
【課題】測定のためのコストを抑えつつ、所定方向に移動するステージの真直度を容易かつ正確に測定する技術を提供する。
【解決手段】上面に直線状のパターン21を有するパターン体2を、ステージ1の第1位置POS1に固定した場合と、ステージ1の移動方向(+Y方向)と平行に所定長さ分ずらした第2位置POS2に固定した場合とのそれぞれについて、パターン体2をY軸方向に移動させたときの、各地点におけるパターン21のX軸方向の中心位置を測定する。そして、得られた測定結果D1,D2の差分をとることにより、パターン21自体のX軸方向の変位量を相殺し、移動中のステージ1の各位置におけるX軸方向についての位置の変化量を算出する。さらに、差分結果を累積加算することにより、(+Y)方向に移動するステージ1のX軸方向についての各地点における変位量(移動誤差、真直度)を算出する。
(もっと読む)
外観検査装置、外観検査方法、画像処理方法及びこれを利用した外観検査装置
【課題】簡単な装置構造で、目視検査に近い多数の条件にて外観異常部と表面深さ異常部を総括的に評価して検査できる。
【解決手段】円柱周面検査装置10は、円柱体1の周面に明視野から暗視野の縞模様を映す照明部12と、円柱周面に投光するラインレーザ投光器と、円柱周面を撮像するカメラ14と、撮像画像データから円柱体1の異常部を抽出する画像処理装置30を備えている。画像処理装置30は、照明条件及び撮像角の違う複数の展開画像を位置を合わせて仮想画面階層配列に再構成し、層別画像データより円柱体1の外観異常部を抽出する外観異常検査部と、画像データよりラインレーザ光が投光された円柱周面の位置を割り出して表面深さ異常部を抽出し、位置を合わせて階層の仮想画面配列にマッピングする表面深さ異常検査部と、目視検査に似せて異常抽出条件の違った多数のデータから総括的に円柱体1の合否判定する判定部とを備えている。
(もっと読む)
配筋検査装置および配筋検査方法
【課題】配筋検査を簡便に、しかも正確に行なえる構成とした、配筋検査装置および配筋検査方法の提供。
【解決手段】1は建設工事で施工される鉄筋で、多数配列されて1本の柱を構成している。2は鉄筋1の固定金具である。3は3次元レーザスキャナヘッドの固定冶具のグリップで任意の鉄筋1に取り付けられる。4は第1の回転軸でグリップ3、アーム5と結合されアーム5を矢視方向に回動自在に取り付ける。6はアーム5、3次元レーザスキャナヘッド7と連結される第2の回転軸で、3次元レーザスキャナヘッド7を矢視方向に回動自在に取り付ける。このように、3次元レーザスキャナヘッドは、グリップ3、第1の回転軸4、アーム5、第2の回転軸6からなる固定治具に取り付けられる構成としている。
(もっと読む)
洋上監視システムおよび方法
【課題】 安価で軽量な構成により監視精度を高めることができる洋上監視システムを提供する。
【解決手段】 洋上の測定対象物Mを撮像して時系列の画像データを生成する撮像装置20と、画像データを解析して測定対象物Mの位置情報を生成する解析装置30とを備え、解析装置30は、各時刻における測定対象物Mの座標値を算出し、所定時間内の前記座標値の中央値または平均値から、測定対象物Mの位置情報を求める洋上監視システムである。
(もっと読む)
欠陥検出装置及び方法
【課題】 欠陥の高さ方向位置を検出できる欠陥検出装置を提供する。
【解決手段】ガラス板99は一定の速度vで移動され、ステージ2の位置dはステージ位置検出装置4により検出される。照明装置1からマスク10を介してガラス板99に対して光を所定角度斜めに入射させ、画像検出装置3によりガラス板99下面で反射した反射光を検出する。入射光と反射光の両方で欠陥を検出し、その時間間隔を測定し、コントローラ5は前記所定角度と所定速度vと時間間隔に基づいて欠陥の高さ方向位置を演算する。
(もっと読む)
201 - 220 / 765
[ Back to top ]