
Fターム[3F072AA06]の内容
Fターム[3F072AA06]の下位に属するFターム
容器 (364)
農産物(果実、野菜、卵等) (22)
加工食品(パン、菓子等) (33)
タバコ、シガレット (11)
電気部品、電子部品 (156)
自動車(ボディ、パネル) (23)
パレット、台車 (16)
ストッパとの係合部を有するもの
ボルト形状物 (17)
孔あき部品(リング、ナット) (13)
コイルばね、スプリング (2)
吊持物(ハンガー、電極板等) (2)
長尺物(棒、管等) (15)
球状物 (4)
円柱、円筒状物 (65)
板状物 (89)
積層体 (17)
袋状物 (31)
錠剤、カプセル (18)
ボビン
コイル (1)
瓦、タイル (1)
Fターム[3F072AA06]に分類される特許
61 - 80 / 126
ワーク供給装置およびその供給方法

【課題】ワーク供給装置およびその供給方法において、ワーク取り入れ装置からのワークの取り入れを間断なく行えるようにし生産性を低下させることがないようにする。
【解決手段】ワーク搬送回転体2を角度α毎に間欠的に回転させ、ワーク取り入れ孔3aないし他のワーク取り入れ孔にワーク4を取り入れる。ワーク取り出し装置6では、ワーク搬送回転体2を角度2α毎に間欠的に回転させることによりワーク4を取り出し、ワーク搬送回転体2にワーク4を一時的に貯留する。ワーク搬送回転体2を逆方向へ角度2α毎に間欠的に回転させることにより、貯留したワーク4をワーク取り出し装置によって取り出し、この間に、次のワークの取り入れ準備を行う。
(もっと読む)
ワーク反転装置

【課題】作業者やハンドリングロボットによらず自動的にワークを上下に反転することのできるワーク反転装置を提供する。
【解決手段】ワーク反転装置30は、圧入装置10の搬出経路途中に配置され、開口31aを回転中心からみて外側にした状態で回転可能なワークボックス31と、ワークボックス31の側面に設けられる第1及び第2のローラピン41、42と、開口31aが圧入装置10と反対側を向いているときに、昇降ユニット11の動きを第1のローラピン41に伝達して第1のローラピン41を押し下げ、ワークボックス31を回転させる押下げレバー33と、開口31aが圧入装置10の側を向いているときに、ワーク受けリフター13の動きを第2のローラピン42に伝達して第2のローラピン42を押し上げ、ワークボックス31を前記回転と逆方向に回転させるワーク受けリフター13と、を備える。
(もっと読む)
発熱組成物成形体包装体の製造装置及び発熱組成物成形体包装体
【課題】 生産性良く、所望形状の発熱組成物包装体を製造できる製造方法及び製造装置を提供する。
【解決手段】 貫通孔を周方向に備える中空の円筒状回転体の上部内側に、前記貫通孔の底側を塞ぐようにして走行するベルトと、前記貫通孔の外側から成形性発熱組成物を供給するための発熱組成物供給装置と、前記貫通孔の開口側の成形性発熱組成物を擦り切る擦り切り部と、前記擦り切り部の前記円筒状回転体との当接部と、回転中心とを結ぶ面を基準とし、回転方向側にθ2及び前記回転方向とは反対側にθ3の範囲において前記ベルトを配置し、前記θ2及びθ3の範囲を、0°<θ2,θ3≦120°としたことを特徴とする。
(もっと読む)
ワーク搬送装置
ワーク搬送体(2)は、ロータリフレーム(3)と駆動部(22)とを具備し、双方とも駆動軸(4)に対して回転可能である。前記ロータリフレーム(3)は、モータ(6)によって駆動され、ホルダ軸に対して回転可能なように駆動軸(4)周りに配設されている複数のワーク支持体(13)を搬送する。駆動部(22)に搭載されている取付部には、前記駆動軸(4)からの偏心距離にある出力ポイント(29)の中央において、固定型中央ホイール(21)と変速部(26)のリングギヤ(27)と噛合うピニオン(25)が取り付けられる。ワーク支持体(13)の駆動ピン(19)を介して、変速部(26)上の駆動開口部(28)は、前記ホルダ軸から偏心距離にある。ロータリフレーム(3)の回転に際し、駆動部(22)は駆動軸(4)を中心とし、さらに変速部(26)に負荷をかけ、前記ロータリフレーム(3)に付随的に回転し、出力ポイント(29)が駆動軸(4)周りに円運動するように偏心動作をなす。その結果、ワーク支持体(13)が対応して回転する。 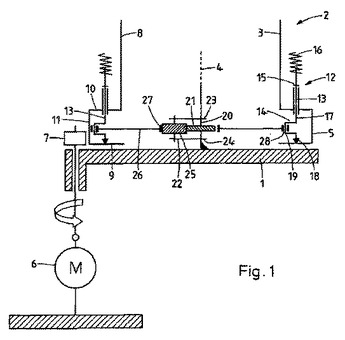 (もっと読む)
(もっと読む)
磁気吸着装置
【課題】 鉄板に直接接触する永久磁石に対して、それを支持するばねによって永久磁石の鉄板からの引き剥がし動作を補償しようとする磁気吸着装置は、塗装が施された鉄板上では、ばね力と磁気吸着力のバランスがずれ、永久磁石の引き剥がし動作に大きな力が必要となるのでそれを防ぐ機構が必要となる。
【解決手段】磁性体でなる被吸着体1に対接する外側フレーム10に対し、高さを調整可能な内側フレーム15を設け、これに対して、他端に永久磁石12を取り付けた支持ばね機構13を係止する構造を導入し、鉄板上に厚さtの非磁性体塗装がある場合には、内側フレームの高さを同じ距離tだけ変更する機構を導入することで、永久磁石12と支持ばね機構13の力が、鉄板の塗装厚さと、永久磁石と被吸着体との間隙にかかわらず、常に平衡するように構成する。
(もっと読む)
ワーク移載装置およびワーク移載方法
【課題】使用するアクチュエータ数の削減に好適なワーク移載装置を提供する。
【解決手段】ワーク搬送手段5おける昇降手段6を、走行手段4に対して走行方向に相対移動可能であり且つ弾性手段(17)により相対移動範囲の中立位置に復帰付勢するよう配置され、前記走行手段4の受取り位置Bおよび受渡し位置Cへの所定以上の接近により、搬送路に設けたストッパ10により停止されて走行手段4がストローク限に向かって前記中立位置から離れる方向に相対移動することを利用してフィンガ爪8を下降させ、走行手段4の受取り位置Bおよび受渡し位置Cからの離脱により、搬送路に設けた前記ストッパ10による相対移動状態から中立位置に復帰することを利用してフィンガ爪8を上昇させるようにした。
(もっと読む)
ワーク吸着ヘッド
【課題】パレット上に既に載置された他のワークに影響を与えずに、小型軽量のワークをパレット上に正しく載置するワーク吸着ヘッドを提供する。
【解決手段】ワーク吸着ヘッド23は、内管31、外管32、飛散防止カバー33などからなる多重構造となっており、内管31と外管32との間に形作られる隙間41と、外管32の側面に設けられたエアー排出路43が構成される。飛散防止カバー33は、吸着したレンズ11をパレット12bに載置するときにバネ34によってパレット12bに押し当てられ、吸着されたレンズ11をノズル部27から離脱するときに吸着口39から吐出されるエアー48を閉じ込める。飛散防止カバー33によって閉じ込められたエアー48は、パレット12bに既に載置された他のレンズ11に影響を与えないようにエアー排出路43を通して排出される。
(もっと読む)
搬送装置
【課題】搬送装置において、被搬送物と被搬送物を把持するグリップ部との互いの位置を調整可能とする。
【解決手段】搬送装置は、軌道(100)に沿って走行する走行部(210)と、走行部の下側に取り付けられており、鉛直方向に交わる表面を有する基準板(251)と、基準板に対向配置されると共に、表面に沿って回転可能なように基準板の下側に取り付けられた回転板(252)と、回転板に設けられており、被搬送物を把持するグリップ部と、回転板を前記基準板に対して回転させることで、グリップ部及び被搬送物間の位置調整を行う調整手段(255、257、258)とを備える。
(もっと読む)
保持装置およびそれを備える搬送装置
【課題】 吸着すべき複数種類の披保持体の大きさに合わせて予め配置して形成しておく必要がなく、かつ複数種類の披保持体の大きさに合わせて迅速に披保持体を保持することができる保持装置およびそれを備える搬送装置を提供する。
【解決手段】 予め定める仮想一平面に臨んで開口21Aする孔がそれぞれ形成される複数の当接部21と、各当接部21に切替えユニット14を介して、圧縮空気供給ユニット15および吸引力供給ユニット16から前記孔に圧縮気体および吸引力を選択的に供給する。圧縮空気供給ユニット15から供給される圧縮空気によって、各当接部21が枠体26の中央から周縁に向かう方向に移動し、各当接部21が披保持体の大きさに対応する位置で、前記孔に吸引力を吸引力供給ユニット16からの吸引力を供給することによって、披保持体を吸着して保持する。
(もっと読む)
自己取付け式ファスナー装置
【課題】自己取付け式ファスナーのボアをパイロット部分の中央に正確に位置決めする。
【解決手段】予備配列された自己取付け式ファスナー(20)のストリップを固着ヘッドに供給する方法等に関する。かかる供給方法は、折れやすいコネクタ(52)によって相互に連結され、各々がボア(26)と、このボア(26)に対してほぼ垂直方向に延びる側壁とを有する、自己取付け式ファスナーの連続ストリップを形成する工程と、実質的に等間隔におかれた複数の当接面(54)を、予備配列された自己取付け式ファスナーのストリップの側壁の少なくとも1つの側面に形成する工程と、駆動部材(86)を当接面(54)の少なくとも1つに当接させるように順に受入れ、駆動部材(86)を移動させ、自己取付け式ファスナー(20)のストリップを固着ヘッドに移動させる工程を有する。
(もっと読む)
段ボ−ルシ−トの自動回転、横出し装置
【課題】 搬送と横出しコンベアを別個の電動ローラとし、さらに横出しロール全体の昇降装置まで必要とするため構造が複雑で、昇降および回転装置を設けた枠装置3の下の限られたスペースで交錯しているので、できるだけシンプルな構造にしたい。
【解決手段】 従来のように昇降および回転装置を設けた枠装置3の下に、搬送と横出しを共通の1式の電動ローラ2で行なうべく90度回転させて使い分ける回転装置5を設ける。
(もっと読む)
整頓装置とそれに用いる供給装置と整列装置と姿勢揃え装置
【課題】 簡易な構成で、複数の対象物の姿勢を揃える姿勢揃え装置を提供しようとする。
【解決手段】
従来の姿勢揃え装置にかわって、複数の対象物を保持する保持姿勢と開放する開放姿勢との間で各々に変化させる複数の把持機器と、複数の前記把持機器を各々に支持する複数の支持機器と、複数の前記支持機器を各々に回転させる回転機器と、複数の前記把持機器に各々に対応づけられ対応づけられた前記把持機器が保持する対象物の外周形状の少なくとも一部分を各々に検知できる複数の検知センサと、を備え、前記回転機器が複数の前記把持機器を各々に回転させている間に、複数の前記検知センサが複数の対象物の前記外周形状の一部分の設定形状が特定方向に向いたことを各々に検知した時に複数の前記検知センサに各々に対応づけられた複数の前記把持機器が姿勢を前記保持姿勢から前記開放姿勢に各々に変化させる、ものとした。
(もっと読む)
搬送装置および搬送方法
【課題】物品を所定の受取位置からその受取位置よりも下方の所定の搬送位置まで運ぶ搬送装置、およびその搬送装置で実施される搬送方法に関し、受取位置で物品が待たされることを低減する。
【解決手段】第2受け部材22は、載置部212が受けている物品下面91oの所定箇所とは異なる箇所を受ける受け部221を載置部212が受けている物品Wの下面91oに宛がい、受け部221に物品Wを載せた状態で搬送位置まで下降しその後その搬送位置から上昇するものであり、載置部212は、受け部221が物品Wの下面91oに宛がわれると物品Wから離れ、第2受け部材22が搬送位置まで下降する経路から外れた、受取位置とは異なる退避位置まで退避し、第2受け部材22が搬送位置から上昇を開始するまでに受取位置に復帰する。
(もっと読む)
物品の選択反転装置
【課題】 物品の選択反転装置であって、物品の上下反転を行なうか行なわないか対応できるものを提供すること。
【解決手段】 物品の選択反転装置100であって、傾斜した物品受け部60を支持フレーム40に支持し、支持フレーム40に対する物品受け部60の傾斜角度を水平面に対して上下に揺動可能にするとともに、支持フレーム40が搭載されている旋回手段12を水平軸まわりに180度旋回可能にするもの。
(もっと読む)
海苔束90度回転・整列方法及び装置
【課題】簡単な構造で海苔束90度回転動作と整列動作の速度を上げて高速処理に対応する。
【解決手段】集束装置から落下した海苔束8を受けて90度回転する受け板10と、上死点から下降する受け板10から90度向きを変えた海苔束8の積載時に停止し、載置後に始動して搬出する第1の搬送コンベヤ9を備えた海苔束90度回転装置と、搬送コンベア9で搬出される海苔束8を搬送し、整列時に停止し、整列後に海苔束を搬出する第2の搬送コンベヤ27と、進入する海苔束8を停止させるストッパ29と、海苔束8を叩いて整列する揃え板28と、進入してくる海苔束8を検知する進入センサ30を備えた整列装置と、第1の搬送コンベア9及び受け板10の停止動作及び始動動作の開始時間を計時する第1のタイマと第2の搬送コンベア27、ストッパ29及び揃え板28の停止動作及び始動動作の開始時間を計時する第2のタイマを備える。
(もっと読む)
ワーク昇降装置
【課題】ワーク載置部材を小さな動力で駆動することができるとともに、ワーク載置部材と周辺の部材との間に作業者の手指が挟まれた場合でも、手指が切断されない安全且つ低コストで新規なワーク昇降装置を提供する。
【解決手段】ワークが載置されるワーク載置部材2と、このワーク載置部材2の姿勢を保持した状態で該ワーク載置部材2を昇降させるワーク昇降機構3とを備え、このワーク昇降機構3は、ワーク載置部材2を支持する揺動枠体5と、この揺動枠体5を揺動可能に支持する揺動支軸46と、揺動枠体5内に配置されてなる移動錘と、この移動錘をワーク載置部材2側及びその反対側に移動させる錘移動手段とを有して構成するものである。
(もっと読む)
重量物用ターンテーブル装置
【課題】専用のケーブル収容スペースをなくして施工費を低減するとともに、外観見栄えを良くする。
【解決手段】躯体に設けられた主制御盤51から延びる通電ケーブル53をターンテーブル13に接続する。基端がターンテーブル13の旋回中心C0から外れた位置で躯体に水平回転自在に枢着された第1アーム59と、先端が第1アーム59先端に水平回転自在に枢着され基端がターンテーブル13下面の旋回中心C0から外れた位置に水平回転自在に枢着された第2アーム61とを備えたケーブル処理装置57をターンテーブル13直下に設ける。ターンテーブル13旋回時、第1アーム59及び第2アーム61の共働により通電ケーブル53をターンテーブル13の旋回動作に追従して過不足なく案内させる。
(もっと読む)
搬送品保持装置
【課題】搬送品を保持するための搬送品保持装置の、フィンガーの位置の自由度を高める。又、搬送品保持装置のフィンガーの位置調整作業を、短時間で行うことを可能とする。
【解決手段】搬送品保持装置30は、フィンガー34の円柱状部34bが、ベース32のクランプ42によって、長手方向(X軸方向)及び周方向(θ軸方向)の任意の位置に保持される。又、フィンガー34を保持するクランプ42を、ベース32のアジャスター44によって、フィンガー34の円柱状部34bの長手方向(X軸方向)と直交する二軸方向(Y軸方向、Z軸方向)の任意の位置に位置決めすることができる。又、フィンガー34、補助フィンガー38、第1の調整金具48、第2の調整金具50の各々を別形状のものと交換することで、搬送品保持装置30の調整幅(汎用性)が広がることとなる。
(もっと読む)
物品のせ降ろし方法と物品のせ降ろし装置
【課題】 変形、型崩れし易い物品を、容器に入れずに、変形、型崩れさせずに移動できる方法と機器の出現が各種業界で望まれていた。
【課題を解決する手段】 移動板とリング状のベルトを設け、ベルトを移動板の底面側と上面側にリング状に周回させ、周回方向一又は二以上の箇所を固定してリング長を一定にし、移動板をリング状のベルト内で前記固定箇所よりも前方にスライドさせるとベルト前方側が移動板底面側から移動板上面側に繰り出されると共にベルト後方側が移動板上面側から移動板底面側に引き出され、移動板を後方にスライドさせるとベルト前方側が移動板上面側から移動板底面側に引き戻されると共にベルト後方側が移動板底面側から移動板上面側に送り戻されるようにした。
(もっと読む)
ロボットの試験装置及び方法及びプログラム
【課題】ロボットごとのバラツキを考慮した試験を人手に頼らずに実施し、毎試験ごとの精度のバラツキを抑え、ロボットの各動作タイミングを考慮した検証を効率良く実施すること。
【解決手段】試験開始時のロボット1の代表的な動作に要する時間を事前に測定する事前測定手段13と、前記事前の測定結果から前記ロボット1の各動作に要する時間の誤差補正を行う誤差修正手段15と、前記ロボット1の各動作を狙ったエラー注入のタイミングを指示するエラー注入指示手段17と、前記ロボット1の指示された動作を狙ってエラーを注入するエラー注入手段32とを備える。
(もっと読む)
61 - 80 / 126
[ Back to top ]