
Fターム[3F072AA06]の内容
Fターム[3F072AA06]の下位に属するFターム
容器 (364)
農産物(果実、野菜、卵等) (22)
加工食品(パン、菓子等) (33)
タバコ、シガレット (11)
電気部品、電子部品 (156)
自動車(ボディ、パネル) (23)
パレット、台車 (16)
ストッパとの係合部を有するもの
ボルト形状物 (17)
孔あき部品(リング、ナット) (13)
コイルばね、スプリング (2)
吊持物(ハンガー、電極板等) (2)
長尺物(棒、管等) (15)
球状物 (4)
円柱、円筒状物 (65)
板状物 (89)
積層体 (17)
袋状物 (31)
錠剤、カプセル (18)
ボビン
コイル (1)
瓦、タイル (1)
Fターム[3F072AA06]に分類される特許
41 - 60 / 126
ターンテーブル装置

【課題】搬送装置とターンテーブルの駆動源を同一にして製造コストを低減することができ、さらに配線数を減らして設置費用を低減することができるターンテーブル装置を提供する。
【解決手段】ターンテーブル装置10は、チェーンコンベア11と、搬送用モータ17と、ターンテーブル40と、リフタ30と、搬送用モータ17の駆動力によって回転するシャフト20と、シャフト20の回転が伝達されて回転するとともに連結板41の上方に配置された回転体27と、を備える。回転体27は、リフタ30の上昇により連結板41に動力伝達可能に連結可能な位置であり、かつ回転体27の回転が連結板41の回転として伝達される位置に配置されている。そして、搬送用モータ17の駆動力がシャフト20及び回転体27を介して連結板41の回転として伝達され、連結板41の回転と共に天板43が回転するように構成されている。
(もっと読む)
加工機械の送込みステーション内において板状要素を位置決めする装置
本発明は、所定の中間位置に配置された板状要素(7a,7b,7c)を把持して板状要素(7a,7b,7c)を連続して位置する加工ステーション(3,4,6)中に定格走行状態で運搬するコンベヤ(8,9)を備えた板状要素の加工機械の送込みステーション(2)内において板状要素(7)を位置決めする装置であって、‐上流側位置から下流側位置に、そして下流側位置から上流側位置に交互(A)に長手方向に移動している板状要素(7a,7b,7c)を一時的に保持して板状要素(7a,7b,7c)を後側位置でピックアップし、これを中間位置に運ぶようにし、そして空の状態で戻る手段(18)と、‐定格走行状態の関数として保持手段(18)を上流側位置から下流側位置に、そして下流側位置から上流側位置に長手方向に移動させるモータ(23)と、‐板状要素(7,7a,7b,7c)の後側長手方向位置を検出して位置信号を出力する手段(27)とを有する形式の装置に関する。モータ(23)は、板状要素(7,7a,7b,7c)を後側位置から中間位置に移動させるよう保持手段(18)を検出手段(27)により出力された信号に従って上流側位置から種々の下流側位置に移動(A,Aa,Ab,Ac)させることができる。 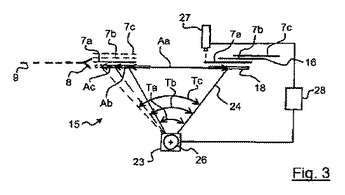 (もっと読む)
(もっと読む)
テーブルの回転支持構造およびこれを備えた表面形状測定装置

【課題】表面形状測定装置において、簡易かつコンパクトな構成を維持しつつ、ワークを支持するテーブルの回転振れの精度を向上させる。
【解決手段】ワークWを支持する測定用テーブル2の回転支持構造であって、テーブルから下方に延設された回転シャフト31と、シャフトを回転自在に支持する支持ベース32とを備え、支持ベースは、シャフトが挿入される支持孔50を有し、当該支持孔内にはシャフトの径方向の荷重を受ける軸受54が設けられた構成とする。
(もっと読む)
自動設備を制御するための安全制御装置および方法
【課題】診断レポートの提供時にプロセス状態自体およびこのプロセス状態と関連するシステム状態を同時に報告する。
【解決手段】複数のセンサーからの複数の制御入力信号が供給される制御部276と、複数のプロセス診断入力信号が供給され、制御対象の設備の複数のプロセス状態のいずれが第1の規定時間に現れるかの判定の基準として前記複数のプロセス診断入力信号を解釈するように構成されたプロセス診断評価部318と、複数のシステム診断入力信号が供給され、前記安全制御装置の複数のシステム状態のいずれが第2の規定時間に現れるかの判定の基準として前記複数のシステム診断入力信号を解釈するように構成されたシステム診断評価部324と、複数の判定プロセス状態および前記複数の判定システム状態に対して複数の診断レポートを提供するように構成され、少なくとも1つの判定プロセス状態に対して、当該プロセス状態および当該複数の判定システム状態のうちの当該プロセス状態と関連する複数の関連システム状態に基づいて診断レポートが提供される診断レポート部940とを備える。
(もっと読む)
移載装置
【課題】簡単な構造で一回の取出操作で移動する金属部品の数を増やして作業効率を向上させることができる移載装置を提供する。
【解決手段】磁性体である金属部品を収容する容器の近傍に設けられた移動機構と、移動機構に連結され任意の方向に移動するアーム部材を有する。アーム部材の先端部に取り付けられた電磁石36と、電磁石36に対して移動自在に取り付けられた磁性体の金属板38を備える。金属板38は、周縁部に凹部42と凸部44を備え、凹部42と凸部44が電磁石36の外側へ突出している。金属板38は、その中心を通過して一方向に長い長孔40を有し、電磁石36は、金属板38の長孔40に差し込まれて金属板38を摺動及び回転可能に係止する係止フランジ部46を備える。
(もっと読む)
物品搬送装置
【課題】省スペースでランニングコストを低く抑えられ、高速で立体的な三次元搬送ができ、長ストロークを上下動できる物品搬送装置を提供する。
【解決手段】物品搬送装置の架台4にラック・ピニオン機構により前進又は後退する前後動部材50の基端部を固定し、前後動部材の先端部には、機械40との間でワークWを授受する上下動ローダを有する上下動部材60(Y)をスライドガイドを介して接続し、上下動部材は前後動部材を介して任意距離移動され、前工程の出口2の未加工のワークをキャリヤー10で上下動ローダの対向位置まで搬送し、キャリヤーと上下動ローダのチャックとのワーク受け渡し位置から上下動ローダを降下して、機械との間でワークを受け渡し、加工済みワークを上下動ローダにより上昇してキャリヤーに受け渡してから後工程の入口3へ搬送する。
(もっと読む)
移載ロボット
【課題】ワークを確実にストレージ体に保持させることができ、またストレージ体からワークをマテハン部で確実に把持して移載することことができる移載ロボットを提供すること。
【解決手段】ストレージ体2(3)から別のストレージ体3(2)へワーク100を移載するために用いられる移載ロボット1である。移載ロボット1は、ワーク100を把持するマテハン部5と、これをを移動させるためのアーム15とを備える。マテハン部5は、ワーク100を把持するクランプ部51、52と、ワーク100を把持した状態でマテハン部5に付与される鉛直方向の荷重を検出して検出信号Pを送信する第1ロードセルと、マテハン部5に付与される水平方向の荷重を検出して検出信号Qを送信する第2ロードセルとを有する。移載ロボット1は、検出信号P及び/又は検出信号Qに基づいて、マテハン部5の作動を制御するように構成されている。
(もっと読む)
ターンテーブル装置
【課題】 構成を簡単にしてコスト面を有利にする。
【解決手段】 床下のピットPに設けられて伸縮時に上端を昇降させる複数本の伸縮体1と、この複数本の伸縮体1の上端に担持されて伸縮体1の伸縮時に昇降するターンテーブル2とを有してなるターンテーブル装置において、ピットPに水平方向の旋回を可能に設置される基台フレーム3を有し、この基台フレーム3に伸縮体1の基端を担持させて伸縮体1の上端を上方に対向させ、この伸縮体1がターンテーブル2の下方に同心に位置決められるガイドフレーム4を上端で担持し、このガイドフレーム4がターンテーブル2を旋回可能に担持してなる。
(もっと読む)
ワーク搬送装置およびその搬送制御方法
【課題】装置自体がコンパクトで場所を取らず、構成部品を減らして、設備コストを抑制可能なワーク搬送装置を提供する。
【解決手段】加工前ワークW1を搬送して加工ステーションに投入すると共に、加工ステーションから加工済ワークW2を取出して送り出すワーク搬送装置20である。
ワーク搬送装置20は、基体21に、加工前ワークW1を投入するべく搬送する第1の搬送機構22と、加工済ワークW2を取出し、搬送する第2の搬送機構23とを備える。
これら第1、第2搬送機構22、23は、基体21に固設した共用雄ねじ24に、ねじ対偶で、それぞれ制御移動可能に構成した。
(もっと読む)
物品搬送装置
【課題】無端軌道を有する物品搬送装置において、高精度の搬送運動を実現でき、しかも設備コストの高騰を防止できるようにする。
【解決手段】物品搬送装置10は、無端軌道12と、無端軌道12に沿って移動可能な複数の移動台14と、それら移動台14を無端軌道12に沿って移動させる駆動機構16とを備える。無端軌道12は、円形状に延びる一条のレール18を備える。複数の移動台14の各々は、少なくとも1つの他の移動台14に固定的に連結されて、一条のレール18に支持される。駆動機構16は、互いに連結された移動台14を一条のレール18に沿って同期して移動させる。複数の移動台14は、互いに強固に支持し合いながら、レール18に沿って安定して安全に移動できる。
(もっと読む)
ハンドリング装置、制御装置及び制御方法
【課題】コンベアによって搬送されている各ワークを効率のよい順番で処理することができるハンドリング装置、制御装置及び制御方法を得る。
【解決手段】ベルトコンベア2によって搬送されているワーク10を撮像して該ワーク10の位置を示すワークデータを生成する視覚センサ3と、搬送されているワーク10に対して所定の作業を行うロボット4と、視覚センサ3から送信されたワークデータを蓄積してデータベースを作成し、該データベースを用いてロボット4の位置に搬送されたワーク10に所定の作業を行うように該ロボット4を制御するコントローラ5とを備え、コントローラ5がデータベースに格納されている各ワークデータに所定の演算を行って複数のワーク10に対してロボット4が作業を行う順番を並べ替える。
(もっと読む)
ゴム栓供給装置
【課題】ゴム栓を所要な向きで確実にしかも効率良く供給する。
【解決手段】ベース部2に軸支されてゴム栓20を載せた状態で回転駆動させるターンテーブル4と、ベース部に固定され、ターンテーブルの外周上側に位置して、ターンテーブル上にゴム栓収容空間5をなす周壁7と、周壁の内面に沿って配置されてゴム栓送給路6を成す略環状のガイド壁9,10を有して、周壁の上側に配置されるガイドプレート8とを備え、ゴム栓収容空間に続くゴム栓送給路の入口部6aが内外のラップしたガイド壁部9a,10aで所要のゴム栓の断面形状に構成されたゴム栓供給装置1を提供する。ゴム栓の種類に応じてガイド壁9,10及び/又は周壁7を交換可能とした。ゴム栓送給路内のゴム栓の量を検知するセンサ27,28を設けた。
(もっと読む)
チャック機構およびそのチャック機構を用いたワーク搬送装置
【課題】径が異なる円筒形状のワークをチャックする際のチャック中心位置がずれないように、チャック位置を調整するようにした、チャック機構およびそのチャック機構を用いたワーク搬送装置を提供する。
【解決手段】開閉可能に構成した第1、第2アーム(11a、11b)により円筒形状のワーク(W)をチャックするものである。
第1、第2アーム(11a、11b)は、それぞれ、ワーク(W)の外周との接触箇所を、ワーク(W)の外周と二箇所で接触する接触面とした第1、第2爪部(13、14)を有し、これら第1、第2爪部(13、14)のうち、いずれか一方の爪部を、第1、第2アーム(11a、11b)の開閉方向に直交する方向に往復動可能な構成とする。
(もっと読む)
パーツの移送装置
【課題】極めて簡単な構造としながら、パーツを安定して移送する。摩耗を少なくして優れた耐久性を実現する。
【解決手段】パーツの移送装置は、パーツPを移送方向に並べて移送路9で押圧して移送する。移送装置は、互いに対向して一緒に回転する一対の回転板1を有する。一対の回転板1は、対向面にゴム状弾性層2を設けて、パーツPを両側から弾性的に押圧・保持して半円軌道上に移送する挟着移送部3を設けている。さらに、一対の回転板1は、挟着移送部3の下部の間隔が上部よりも狭くなるように、互いに傾斜する姿勢に配置している。挟着移送部3の一端にはパーツPの供給ガイド5を、他端にはパーツPの排出ガイド6を設けている。移送装置は、供給ガイド5から、回転する回転板1の挟着移送部3の一端にパーツPを供給し、供給されたパーツPを、回転する回転板1の挟着移送部3に挟着して移送し、排出ガイド6から移送路9に排出する。
(もっと読む)
搬送装置
【課題】多様な形状の被工作物を正確な位置で容易に把持して搬送することが可能であり、かつ、安価な搬送装置を提供する。
【解決手段】
搬送装置11には、ワークの側面を把持するための複数のクランプ爪5,5と、ワークWの表面を押さえ付けるための押付部材2と、ワークWの上面に穿設された窪み8に挿入するためのガイドピン3とを有する把持手段15が設けられている。そして、その把持手段15が、ガイドピン3によってワークを位置決めし、押付部材2によってワークWを搬送姿勢で固定するとともに、クランプ爪5,5によってワークWの側面を把持した状態でワークWを把持するようになっている。
(もっと読む)
ワーク移送装置およびその移送方法
【課題】 ワーク移送装置およびその移送方法において、コストを低減し、かつ作業時間を短縮するとともに省スペース化を図る。
【解決手段】 第1のワーク16を供給するワーク供給ライン15と、第1のワーク16と第2のワーク18とを組み立てた組立体19を排出するワーク排出ライン17とが互いに平行に配設されている。軸6aを回動中心として時計・反時計方向に90°往復回動するワーク移送手段10は、ワーク供給ライン15から組立ステージ20A,20Bに第1のワーク16を移送するための第1のアーム11A,11Bを有する。また、ワーク移送手段10は組立ステージ20A,20Bからワーク排出ライン17へ組立体19を移送するための第2のアーム12A,12Bとを有する。
(もっと読む)
搬送装置
【課題】電力消費量を抑えて、省電力を実現することが可能な搬送装置を提供する。
【解決手段】商品処理システム1における箱詰部6は、搬入コンベア53と、アーム部材と、制御システムとを備えている。搬入コンベア53は、商品Xを搬送する。アーム部材は、商品Xを吸引して保持するためのブロアを有し、所定の経路を移動可能に配置されている。制御システムは、搬入センサ22からの受信信号を受信してから第1所定時間が経過した時に、搬入コンベア53を停止させるように制御し、第2所定時間が経過した時に、ブロアを停止させるように制御している。
(もっと読む)
選別装置
【課題】野菜、いも類、果実、魚貝類等の選別装置に関し、選別場床面積を狭くする。
【解決手段】被選別物を載せて搬送しながら選別位置に転倒排出する選別皿1を、円周水平面方向に沿って回転搬送して、この回転域上に被選別物を供給する供給装置2をのぞませ、回転域下に各選別位置の排出シュータ3をのぞませて配置する。各選別皿1の回転によって、この選別皿1に受けられた被選別物は遠心作用が働いて、選別皿1の外周端側への移行が容易で、この選別皿1の転倒排出作用の行われ易い状態に揃えることができる。
(もっと読む)
部材の反転装置
【課題】エネルギー資源の有効活用とコストの抑制を図りつつ、作業効率の改善された、部材の反転装置を提供する。
【解決手段】本装置は、部材1を搬送する搬送路2と、搬送路2から遠ざかる向きの上昇勾配θ2を形成するラック3と、ラック3上を回転しながら当該軌道3に沿って移動可能なピニオン4と、ピニオン4に繋がり部材1を保持したときの重心バランスのずれによりピニオン4と共に回転可能なコンテナ5とを備え、コンテナ5が部材1を保持したときには、部材1を保持したことによる重心バランスのずれにより、コンテナ5が引っくり返りながらラック3を登って反転状態となり、コンテナ5から部材1を取り外したときには、コンテナ5が、その自重によって回転しながらラック3を降ることで初期状態に復帰する。
(もっと読む)
ワーク搬送装置
【課題】投資価格を抑えて、無駄な搬送を行うことなく搬送路の全体にわたってワークを搬送することができるワーク搬送装置を提供すること。
【解決手段】ワークを搬送して複数の加工設備40a〜40dにて加工を行う生産ラインにおけるワーク搬送装置であって、ワークを把持可能なワーク把持具10a,10bと、複数の加工設備40a〜40d上に配置され、ワーク把持具10a,10bを移動可能な状態で懸架する複数のレール30a,30bとを備えるものであって、複数のレール30a,30bは、複数の加工設備40a〜40dにおける少なくとも一つの加工設備40c上に少なくとも二つのレール30a,30bの一部が重複するように配置される。
(もっと読む)
41 - 60 / 126
[ Back to top ]