
Fターム[3F072AA06]の内容
Fターム[3F072AA06]の下位に属するFターム
容器 (364)
農産物(果実、野菜、卵等) (22)
加工食品(パン、菓子等) (33)
タバコ、シガレット (11)
電気部品、電子部品 (156)
自動車(ボディ、パネル) (23)
パレット、台車 (16)
ストッパとの係合部を有するもの
ボルト形状物 (17)
孔あき部品(リング、ナット) (13)
コイルばね、スプリング (2)
吊持物(ハンガー、電極板等) (2)
長尺物(棒、管等) (15)
球状物 (4)
円柱、円筒状物 (65)
板状物 (89)
積層体 (17)
袋状物 (31)
錠剤、カプセル (18)
ボビン
コイル (1)
瓦、タイル (1)
Fターム[3F072AA06]に分類される特許
101 - 120 / 126
ワーク搬送装置
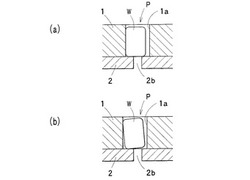
【課題】ワーク収納凹部内に残ったワークを外方へ確実に排出することができるワーク搬送装置を提供する。
【解決手段】ワーク搬送装置はベース2と、ベース2上に回転自在に配置され、外周にワークWを収納する多数のワーク収納凹部1aが形成された搬送テーブル1と、搬送テーブル1のワーク排出位置において、ワーク収納凹部1aの一側に配置された噴出口2bと、ワーク収納凹部1aの他側に配置されたワーク排出パイプとを備えている。ワーク排出位置Pに、ワーク収納凹部1b内のワークWの有無を検出する検出センサが設けられている。搬送テーブル1と噴出口2bは制御部20により制御され、制御部20は検出センサ5からの信号に基づいてワークWがワーク収納凹部1bから排出されない場合に、搬送テーブル1を所定距離だけ移動させて、ワーク噴出口2bからエアを噴出する。
(もっと読む)
単個品を向き変えするための引渡し装置
単個品を(60のところで)把持するための引渡し装置が、中央のホイールボディを有しており、該ホイールボディの周面に、それぞれ第1の軸線(23)を中心にして旋回可能である多数のアーム(20)が枢着されている。該アーム(20)は、1つまたは複数の単個品(15)を収容するためのグリッパ(60)を有している。各グリッパ(20)は第2の軸線(33)を中心にして、単個品の規定された向きに合わせて回転可能であり、それに対して結合体(30)は第1の軸線(23)を中心にして回転可能である。その場合、グリッパ(60)の回転運動は第1の軸線(23)に配置されたシャフト(28)を介して伝達機構(25,26,27)によって、第2の軸線(33)を中心にして回転するグリッパ(60)へ伝達可能となる。さらに、第1の軸線(23)と第2の軸線(33)との間で結合体(30)に第3の軸線(43)が配置されている。これによって、結合体(30)の制御された回転が、第3の軸線(43)に配置されたシャフト(49)を介して、結合体(30)の第1の軸線(23)の位置へ作用する伝達機構(45,46,47)を用いて可能となる。このことは単個品(15)の追従トラッキングを可能にする。  (もっと読む)
(もっと読む)
ロール体のターンテーブル装置

【課題】簡易な構造で以ってロール体の搭載と固定を同時に行うことができるロール体のターンテーブル装置を提供すること。
【解決手段】少なくとも連続したテープを巻き取ったロール体10の中心孔と同軸線上に位置する支軸21を具備し、支軸21を中心に回転するロール体10からテープを引き出すターンテーブル装置であって、支軸21の先端部に位置決め用のホルダ装置30を付設し、ホルダ装置30がロール体10の中心孔の内周面と当接可能な複数の回転体32を具備している。
(もっと読む)
ターンテーブル及びターンテーブルを含むローラコンベアを用いた搬送システムの制御方法
【課題】 ターンテーブルを含むローラコンベアを用いた搬送システムにおいて遮断された電源を再投入する際に、効率的に被搬送物の搬送を再開する。
【解決手段】 ドグ検出センサ3と補助ドグ検出センサ4とドグ5とからなる回転位置検出機構2により回転テーブル6の回転位置を検出して、フォトセンサ26によりローラ支持フレーム42上のキャリア23の存在を確認する(S1、2)。ローラ支持フレーム42上にキャリア23が存在する場合は、フォトセンサ26でキャリア23が所定の停止位置にあるか確認する(S3、4)。キャリア23が所定の停止位置に無い場合はキャリアを撤去してする(S4、5)。次に、回転テーブル6が所定の停止位置にあるか確認し(S6)、所定の停止位置に無い場合は回転テーブル6を正常位置にした後(S7)、回転テーブル6を目標位置に回転し、搬送システム1の電源を再投入する(S8、9)。
(もっと読む)
ワーク搬送装置
【課題】 トランスファープレス等におけるワーク搬送装置において、ワーク把持装置を移動させるサーボモータの故障による運転停止の頻度を低減させるとともに、保守部品の保管・管理の負担を軽減することができる装置を提供する。
【解決手段】 所定のワーク1を把持するワーク把持部15と、ワーク把持部15にそれぞれ回転可能に接続された一対のアーム7,8と、各アーム7,8のそれぞれの他端に回転可能に接続されると共に往復直線移動する一対のスライダ4,5と、一対のスライダ4,5をそれぞれ駆動する一対の駆動部17,18と、を備えるワーク搬送装置101において、一対の駆動部17,18が、それぞれ複数のアクチュエータ31A,31B,32A,32Bにより構成される。
(もっと読む)
搬送装置
【課題】 搬送装置の汎用性を向上することである。
【解決手段】 ワークWを搬送する搬送装置Tにおいて、ワークWを把持および釈放可能な把持手段Hを備えた伸縮動作可能なアームAと、アームAを水平に往復移動させるとともに移動方向へアームAを遥動させる移動手段Mとを備えたので、ワークWの上方に障害物がある場合にも搬送することが可能となり搬送装置Tの汎用性が向上する。
(もっと読む)
ハンドリング装置、作業装置及びプログラム
【課題】搬送される複数の物品に関する情報を効率的に処理できるハンドリング装置を提供する。
【解決手段】ハンドリング装置1は、ワーク100を搬送するコンベア2と、ベルト12を分割した複数のトラッキング範囲R5の画像を取得してワーク100の位置を検出する視覚センサ3と、ベルト12の移動量を検出するエンコーダ4と、エンコーダ4の検出する移動量に基づいて、複数のトラッキング範囲R5の移動量を監視し、ワーク検出エリアR12を通過中のトラッキング範囲R5を特定するトラッキングマネージャ21bと、トラッキングマネージャ21bにより特定されたトラッキング範囲R5内において物品を選択するワークマネージャ21cと、ワークマネージャ21cにより選択されたワーク100を保持するようにロボット5の動作を制御する制御部21dとを備える。
(もっと読む)
荷物移載システムおよびこれに用いるパレット
【課題】安価なシステム構成としながらも、荷物供給側所有のパレット上の荷物群を荷物需要側所有のパレット上に任意の場所で迅速に移載できる荷物移載システムと、軽量で、且つ嵩低く積み重ねることが可能な形状を有した取り扱い容易なパレットを提供する。
【解決手段】車両本体8の前端部の昇降ガイドポスト9に沿って上下動される作動制御装置部13と、車両本体8の前後方向に沿った向きで一定間隔、且つ互いに平行な配置で配列されて作動制御装置部13に直線移動可能に設けられ、作動制御装置部13の作動制御を受けて前後方向に進退移動される複数の支持腕体14とを有する構内運搬車両2と、各支持腕体14が挿入可能な溝幅と溝深さを有する複数のガイド溝7が一定間隔で、且つ互いに平行な配置で厚み方向の両面にそれぞれ形成され、且つ厚み方向の中央部に支持腕体14を当接させる係止部4が設けられた形状のパレット1とにより構築する。
(もっと読む)
把持機器を用いて房から一度に1つの個別の毛髪/繊維を除去するための装置
対向する第1及び第2把持要素(5,6)を有する把持機器(4)を用いて、房(3)から一度に1つの個別の毛髪/繊維(2)を除去するための装置(1)。第1及び第2把持要素(5,6)は互いに関して相対的に移動可能であり、第1把持要素(5)は第2把持要素(6)の方を向いたくさび形の溝(7)を有し、また第2把持要素(6)は本質的に平坦な押圧受け領域(8)を有し、その際、第1把持要素(5)はくさび形の溝(7)側で先細になっている(テーパA)。  (もっと読む)
(もっと読む)
物品受渡装置
【課題】 搬送面上に形成された物品受容部に物品を載置して搬送するコンベヤと、前記物品受容部に対してトラッキング動作しながら該物品受容部との間で前記物品の授受を行なう物品保持機と、を具備する物品受渡装置に於いて、異常が発生した際の急停止時にコンベヤと物品保持機の同期が崩れるのを防止する。
【解決手段】 前記トラッキング動作中に前記コンベヤ及び前記物品保持機を急停止させるときには、前記物品保持機の前記トラッキング動作を中断し、物品保持状態で減速可能な値として予め設定さている物品保持機の設定減速度、又は、コンベヤの設定減速度うち、小さい方の設定減速度を用いてコンベヤ及び物品保持機を停止させる。
(もっと読む)
回転ワーク支持装置
【目的】パレットで搬送されるワークを回転させながら接着剤塗布するとき、パレットを特別な構造にせず、簡単な構造でコストダウン可能にする。
【構成】パレット30に受け治具21〜24を介してワーク11〜14を支持し、回転駆動手段40の上に置いてパレット30を押し下げることにより、回転駆動手段40の筒部41〜44で受け治具21〜24をパレット30から脱着させ、同時に各受け治具21〜24と係合一体化し、この状態でモータ48を駆動すると、出力ギヤ49と各筒部の被動ギヤ47a〜dが噛み合って、全ワーク11〜14が一度に回転する。
(もっと読む)
コイン送り出し装置のコイン逆行防止装置
【課題】
本発明の第1の目的は、回転ディスクから送り出された一枚目のコインの逆行を防止することにより、騒音の発生を防止することである。
本発明の第2の目的は、簡単に後付けできるコインの逆行防止装置を提供することを目的とする。
本発明の第3の目的は、安価なコインの逆行防止装置を提供することを目的とする。
【解決手段】
回転ディスクによってコインを一つずつ案内装置に送り出し、前記案内装置により前記送り出されたコインを一列に整列して上方に案内するようにしたコイン送り出し装置において、前記回転ディスクに隣接して前記回転ディスクから送り出されたコインに作用する逆行防止装置を設け、前記逆行防止装置は、自由端が前記回転ディスクによって送り出されたコインのコイン通路に位置し、かつ、移動するコインによって前記コイン通路から外されるようピボット運動可能なワンウエイストッパを含んでいることを特徴とするコイン逆行防止装置である。
(もっと読む)
自動移送システム用角度転換装置
開示されている自動移送システム用角度転換装置は、案内溝をスラットコンベヤーに横に形成し、前記案内溝を挟んでスラットコンベヤーの両側に移送された積載物を、油圧や空圧により持ち上げるようにリフト部を設置し、前記リフト部間のスラットコンベヤーを直交するように配置したレールの中間に、駆動モーターにより多数の駆動スプロケットを回転させる前後進駆動部を配置しており、そして、前記スラットコンベヤーに近い位置のレール一側に回転誘導軸ピンを設置し、前記レールに沿って、スラットコンベヤー上に、前後進駆動部の作動により位置する時に、回転誘導軸ピンにより原紙ロールの方向を90゜と移動板上で転換するようになる回転板を設置したターンテーブルキャリア部を含んで構成される。  (もっと読む)
(もっと読む)
搬送装置及び搬送システム
【課題】
ワークWを供給部Aから搬出部Bに、搬送・整列させる多点位置搬送において、タクト時間の短縮が難しい。
【解決手段】
水平移動ブロック部10と、回転ブロック部20と、開閉ブロック部30とを具備し、前記開閉ブロック部30は開閉駆動部40と、開閉駆動部40に開閉可能に設けた一対のハンド54,55及びこれらハンドの上下動手段52,52を有する開閉移動部50とから構成してなり、一対のハンドで交互に支持したワークWを、水平移動ブロック部,回転ブロック部,開閉ブロック部の協働作用により、ワーク供給部60から搬送距離の異なるワーク搬出部70の多数の搬出ポジションにほぼ同等の時間で搬送するようにした。
(もっと読む)
ワーク取外し装置
【課題】吊り下げハンガーに吊り掛ける際には、効率的に勝つ確実に処理するに適したピッチ間隔で配設されるが、その前段階では、前段階に適したピッチ間隔で配設されることが多く、その場合には、両ピッチ間隔が一致しないことが多く見られる。その場合には、手作業でワークWを1個づつ移し替えている。このような手作業では、作業が繁雑になり、効率よく作業を行うことが出来ない。
【解決手段】把持部材40は、第1所定ピッチP1で収納容器70に配列された1列のワークWを把持し、第1ピッチ変更部材32に搬送して、この第1ピッチ変更部材32に移し替えて第2所定ピッチ間隔P2に変更し、再度把持部材40で1列のワークWを把持して、吊り下げハンガーHまで搬送し、1列のワークWを吊り下げハンガーH移し替えて、ワークWを第2ピッチ間隔で保持する。
(もっと読む)
自動作業システム
【課題】データキャリアに対する情報の書込み或は読取りのために、搬送手段を停止させずとも済む自動作業システムを提供する。
【解決手段】データキャリアをワーク2に設け、第1および第2のロボットアーム5および8の先端部にリードライト装置を設ける。検査装置4での検査結果情報をデータキャリアに書き込む動作を、第1のロボットアーム5の先端部が検査装置4のワーク2に接近してから当該ワーク2を搬送中のパレット3上に載置して上昇するまでの間に行う。そして、ワーク2を検査結果に応じて良品収納ケース6或は不良品収納ケース7に分けて収納するために、データキャリアに書き込まれた検査結果情報を読み取る動作を、搬送中にあるワーク2に追従して移動するようになってからワーク2を把持してベルトコンベア装置1から取り出すまでの間に行う。
(もっと読む)
物品受け渡し装置
【課題】 物品を円滑かつ能率的に連続搬送装置から間欠搬送装置へ受け渡す装置を提供することを目的とする。
【解決手段】 定速連続回転体11の周囲部に周方向で所定間隔に複数の物品授受部12が設けられた連続搬送装置10と、間欠回転体21の周囲部に周方向で上記所定間隔と同じ間隔に複数の物品授受部22が設けられた間欠搬送装置20と、連続搬送装置10と間欠搬送装置10の間で物品を転送して物品の授受を行なわしめる中間接続装置30とを有する物品受け渡し装置において、中間接続装置30は、変速回転体31の周囲に複数の物品授受部32が設けられていると共に、物品授受部における周速が連続搬送装置10に同じ第一速度V1と物品授受時の間欠搬送装置20に同じ第二速度V2とを交互に周期的にもつ変速回転を行なう。
(もっと読む)
キャップ整列装置
【課題】 各種形状寸法のキャップを一定の方向に整列すること。
【解決手段】 コンベア20で搬送されてくるキャップ1を所定の姿勢に整列するキャップ整列装置100であって、コンベア20の搬出端の近傍に配置したロボットハンド51によりキャップ1をピックアップして整列可能にするもの。
(もっと読む)
ローラコンベヤ並びにそれによって搬送されるワークキャリヤおよびワーク
【課題】ローラ上から搬送されたワークを簡単かつ個別的にローラの搬送方向から取り出し、リードタイムの短縮化を図る。
【解決手段】複数のローラR1,R2がローラ支持台1上に平行に配列され、ローラR1,R2上のワークWがローラR1,R2の中心軸線に対して垂直な方向に搬送されるようにローラコンベヤを構成し、複数のローラR1,R2のうちの一部のローラR2をローラ支持台1に対して着脱可能に構成し、ローラR2をローラ支持台1に対して昇降させるリフタ2を設けた。
(もっと読む)
物品の移動装置
【課題】 真空吸着パッドにより物品を所定位置に所定の姿勢で移動し、その位置、姿勢に乱れを生ずることなく解放すること。
【解決手段】 真空吸着パッド55の真空状態にした吸盤55Aによりキャップ1を保持して所定位置へ所定の姿勢で移動し、真空状態を解除した吸盤55Aからキャップ1を解放するキャップ1の移動装置であって、吸盤55Aの真空状態を解除する前に、吸盤55Aが保持しているキャップ1を所定の姿勢で所定位置に仮固定する手段(吸着体31)を有するもの。
(もっと読む)
101 - 120 / 126
[ Back to top ]