
Fターム[3F072AA06]の内容
Fターム[3F072AA06]の下位に属するFターム
容器 (364)
農産物(果実、野菜、卵等) (22)
加工食品(パン、菓子等) (33)
タバコ、シガレット (11)
電気部品、電子部品 (156)
自動車(ボディ、パネル) (23)
パレット、台車 (16)
ストッパとの係合部を有するもの
ボルト形状物 (17)
孔あき部品(リング、ナット) (13)
コイルばね、スプリング (2)
吊持物(ハンガー、電極板等) (2)
長尺物(棒、管等) (15)
球状物 (4)
円柱、円筒状物 (65)
板状物 (89)
積層体 (17)
袋状物 (31)
錠剤、カプセル (18)
ボビン
コイル (1)
瓦、タイル (1)
Fターム[3F072AA06]に分類される特許
21 - 40 / 126
多色化粧料の製造方法
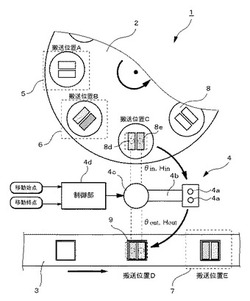
【課題】打型物を崩すことなく化粧皿への移し替えを可能にして、多色化粧料の生産ラインの自動化を図る。
【解決手段】移載機4は、移動始点θin,Hinで打型物を保持し、移動始点θin,Hinから移動終点θout,Houtに打型物を移動させ、移動終点θout,Houtで打型物を解放するという動作条件にしたがって動作する。これによって、搬送位置Cに存在する複数の打型物は、化粧皿9内における所定の収容位置に移動する。
(もっと読む)
X線検査装置

【課題】本発明の課題は、X線検査を安定させることができるX線検査装置を提供することである。
【解決手段】本発明に係るX線検査装置100は、物品Bを搬送する検査テーブル711と、検査テーブル711で搬送される物品BにX線を照射するX線源200と、X線源200から照射されるX線を検査テーブル711を介して検出する第1の領域AR1と、X線源200から照射されるX線を検査テーブル711を介さずに検出する第2の領域AR2とを有するラインセンサ400と、検査テーブル711と同じ透過特性を有し、第2の領域AR2で検出されるX線の減衰を調整するX線減衰調整部410とを備える。
(もっと読む)
コンベア反転装置及びそれを用いた検査装置
【課題】 駆動ドラムにより、2本のエンドレスベルトを作動させ、該エンドレスベルトの間にワークを挟んだ状態で搬送し、ワークの上下を反転させる反転装置における、ワークの品種の違いへの対応性を向上させる。
【解決手段】 ドラムを、ドラム基部11と複数のドラム分割体12を組み合わせる構造とし、ドラム分割体12に、ワークの形状に対応した突起16と溝17体を設けておく。ドラム分割体はネジ止めなどの方法で接合され、エンドレスベルトが当接していない部分を順次交換できるので、エンドレスベルトの掛け替えなどの付随する作業が不要となり、工数削減と作業性の向上が可能となる。
(もっと読む)
ワーク搬送システム
【課題】より簡易な構成で生産性の高い生産ラインを構築できるワーク搬送システムを提供する。
【解決手段】搬送装置10、11は、レール軌道14、15の上にそれぞれ独立して移動する複数の搬送ロボット16a〜16dを有し、各搬送ロボットは、ワーク12を保持するハンド17a〜17dを備える。例えば、搬送ロボット16aが保持するワーク12に対して、作業装置18aが直接組立作業や加工処理を行い、作業終了後に搬送ロボット16aが下流方向へ移動し、隣接する次工程の搬送ロボット16bとの間でワーク12の受渡しを行う。次工程の搬送ロボット16bは同様の動作を行い、ワーク12を矢印で示す下流方向へ順次搬送する。隣接する搬送ロボットとのワーク受渡し位置を変更することで、生産ラインの高速化を図ることができる。
(もっと読む)
仕分装置
【課題】簡単な構造および制御で被搬送物の姿勢や位置の変更を行って搬出することができ、大量の被搬送物を短い間隔で連続的に姿勢や位置の変更することで作業効率を向上できる仕分装置を提供すること。
【解決手段】ボールコンベヤ110の下端から突出したフリーボール111に回転力を与えるターンテーブル121によってボールコンベヤ110の上方に載置された被搬送物を移動させる仕分装置100において、駆動制御機構130が、ボールコンベヤ110とターンテーブル121とをそれぞれ独立して同時に駆動制御可能であること。
(もっと読む)
ロケーティングステーション
【課題】コンベアシステム用のロケーティングデバイスを提供する。
【解決手段】コンベアシステムにおけるロケーティング位置でパックを保持するためのロケーティングデバイス(1)は、ベース部(4)と、レールセクション(2)と、ベース部(4)に回転可能に支持されかつパック凹部(5)を有する回転ディスク(3)とを具備してなり、ロケーティングデバイスは、回転ディスク(3)のパック凹部(5)とレールセクションにおけるポジショニング手段(6)と間のロケーティング位置を具備してなると共に、ロケーティングデバイスはロケーティング位置においてパックを保持するよう構成された弾性手段(7)を具備してなる。本発明の利点は、物品を、あるコンベアトラックから他のコンベアトラックへと、容易にかつコスト効率よく移動させることができるということである。
(もっと読む)
昇降装置
【課題】搬送通路との干渉を避け、且つワークを安定して昇降させる。
【解決手段】ワークを搬送する搬送通路を挟んで配置される複数の垂直軸と、各垂直軸に個別に対応して設けられ、ワークを支持可能な複数のアームと、各アームに個別に対応して設けられ、対応するアームを垂直軸に沿って昇降させる複数の昇降アクチュエータと、複数の昇降アクチュエータを駆動制御する昇降制御部と、各アームに個別に設けられ、対応するアームを水平面内で揺動させる複数の揺動アクチュエータと、前記複数の揺動アクチュエータを駆動制御する揺動制御部と、を備え、昇降制御部より与えられる指令に基づいて各昇降アクチュエータが駆動され、揺動制御部より与えられる指令に基づいて各揺動アクチュエータが駆動される昇降装置において、アームが、垂直軸に連結されて水平面内を揺動可能な平行リンク部と、平行リンク部に連結されて水平面内を揺動可能な先端部とを有する。
(もっと読む)
移載装置及び移載方法並びに物品仕分け設備
【課題】従来よりも移載処理能力が向上した移載装置及び移載方法並びに物品仕分け設備を提供する。
【解決手段】
複数の物品が品種ごとに分けられてそれぞれ収容された複数の実ケースから、物品を移載して収容する仕分けケースを搬送するロボットプレースコンベヤ41と、物品を実ケースから仕分けケースに移載するロボット40と、を備えた移載装置69であって、実ケースを搬送する実ケース搬送コンベヤ25から供給された複数の実ケースを往復動させる往復動コンベヤ70を備え、往復動コンベヤ70を動作させて、移載対象となる物品をロボット40の動作範囲内に移動させる。
(もっと読む)
薄板状部品ハンドリング装置
【課題】 薄板状部品を一枚ずつ取り出すことができるとともに、二層重なって吸着された場合でも、二層目の部品を確実に分離できる薄板状部品ハンドリング装置を提供する。
【解決手段】 薄板状部品ハンドリング装置1は、薄板状部品を複数枚積層して保持するホルダー10と、薄板状部品の最上部のものに当てられる真空チャック40と、真空チャックを進退させるチャック駆動機構と、チャック40に吸着された薄板状部品に気流を当てるノズル70と、を備える。真空チャック40は、薄板状部品の表面に分散して当てられる3本以上の細径パイプ41からなり、細径パイプ41内を選択的に真空及び正圧とに切り替えることができる。チャック40の進退方向は、重力方向に対して80°〜10°傾斜している。
(もっと読む)
X線検査装置
【課題】低コストおよび省スペースで、既に構築された搬送ラインに対してX線検査を追加するX線検査装置を提供する。
【解決手段】X線検査装置100においては、受取部600によりベルトコンベア900から物品Bが受け取られる。次いで、X線検査部700により受取部600から受け取った物品Bの異物検査が行われる。そして、受渡部800によりX線検査部700において検査された物品Bがベルトコンベア900に受け渡される。また、X線漏洩防止カバー910は、X線検査部700から照射されるX線の漏洩を防止する。受取部600および受渡部800は、物品Bの載置部が平面のみからなり、かつ物品Bを載置しつつ搬送する受取テーブル611,受渡テーブル811と、物品Bの移動を補助する案内ガイド板621、補助案内部622,623、案内ガイド板821、補助案内部822,823とを含む。
(もっと読む)
搬送装置
【課題】被搬送物を設定された複数の特定角度に切り換えることができる搬送装置を提供する。
【解決手段】回転自在に支承された被搬送物支持具12を設定された複数の特定ロック角度でロックするロック手段27とロック解除用被操作具29が設けられた搬送用走行体1の停止位置には、ロック解除用被操作具29に対して作用するロック解除操作手段40と被搬送物支持具12の回転駆動手段41とが併設され、回転駆動手段41は、被搬送物支持具12の回転軸心と平行な方向に出退移動自在な可動台43上に軸支された駆動用回転体44を備え、この駆動用回転体44には、その偏心位置から突設された駆動ピン45とセンサー46が設けられ、被搬送物支持具12側には、駆動ピン45が嵌合可能な駆動ピン嵌合部23と、この駆動ピン嵌合部23に駆動ピン45が嵌合する以前の駆動用回転体44の回転によりセンサー46が検出できる被検出部24が設けられた構成。
(もっと読む)
被搬送物の転写装置
【課題】被搬送物の表面に凹凸があっても、該被搬送物を安定して保持ヘッドに転写することができ、更に該被搬送物を他の部材に転写することができる装置を提供すること。
【解決手段】凹凸表面を有する被搬送物3を、保持ヘッド15の保持表面15aに転写して吸引保持し、更に他の部材17a等に転写する被搬送物の転写装置10である。保持ヘッド15の保持表面15aが、被搬送物3の凹凸表面と相補形状をなす凹凸形状となっている。被搬送物3の凹凸表面が段差を有しており、保持表面15aのうち、該段差が変化する部位に対応する部位の近傍に、吸引孔が設けられていることが好適である。
(もっと読む)
旋回装置及び搬送装置
【課題】重力の影響を利用して、ワークの進行方向を変化させるとともに、ワークの垂直方向の位置を変化させることを実現可能にする。
【解決手段】シリンダ72は、弾性体73により回転連結部材77を上方向に付勢する。シリンダ72は、飛出防止機構78により係止されたワーク61の自重により弾性体73の付勢力に抗して下動し、ワーク61の自重から解放された場合には弾性体73の付勢力により上動するように配設されている。シリンダ72には、下動又は上動時の旋回を案内するリード溝91が形成されている。ガイドピン74は、リード溝72に挿入された状態を維持することで、上動又は下動しているシリンダ72を旋回させる。
(もっと読む)
微小物体の外観検査装置
【課題】微小物体の外観検査装置において、微小物体の多様な仕様に対応しつつ、外観の広い領域に亘って高精度な検査を行う。
【解決手段】微小物体50の外観検査装置100は、表面に吸着部22を有し、被検査体を回転搬送する第1ドラム7と、被検査体及び中央部を通る線上の、被検査体及び中央部間の一の領域に配置された撮影手段31と、当該線上の他の領域に配置された撮影手段32と、側面に吸着部23を有し、被検査体を回転搬送する第2ドラム9と、第2ドラムの表側及び裏側にそれぞれ配置された撮影手段33、34と、側面に吸着部24を有し、被検査体を回転搬送する第3ドラム11と、第3ドラムの表側及び裏側にそれぞれに配置された撮影手段35、36と、これら撮影手段によって撮影された画像情報から不具合の有無を判定する判定手段とを備える。
(もっと読む)
組合せ計量装置
【課題】容器の周回軌道が上下方向に複数段重ねられた組合せ計量装置において、被計量物の排出能力を向上させた組合せ計量装置を提供する。
【解決手段】組合せ計量装置10では、第1搬送部111の容器入替機20は、第1軌道上にある容器のうち、選択された複数の容器Cの順番を第1軌道上で入れ替える。第2搬送部112の容器入替機20、第2軌道上にある容器のうち、選択された複数の容器Cの順番を第2軌道上で入れ替える。容器入替機20は、各軌道上での容器の入れ替え動作以外に、第1軌道上で待機する容器Cを順次第2軌道上に移動させ被計量物の排出を終えた容器Cを順次第1軌道上へ戻す受け渡し動作をも行うことができる。
(もっと読む)
包装物品ハンドリング装置
【課題】包装物品を刺身の盛り付け状態のように並べるのに適した包装物品のハンドリング装置を提供する。
【解決手段】物品をピロー袋2に封入した縦横に比べて厚さの薄い包装物品1を、搬入コンベア10上に1列に並べて搬入する。移載ロボット30により三次元移動するピッキングヘッド20には、包装物品1を1個ずつ吸着する吸着具22が複数個、1列に並べて配置されている。制御装置31は、吸着具22を、搬入コンベア10上の包装物品1の中で、包装物品1の並びの方向において一方に偏った箇所に当て、吸着具22に真空吸引力を働かせる。ピッキングヘッド20を上昇させると、包装物品1は吸着具22から斜めに垂れ下がる。吸着具22の間隔を縮めると包装物品1同士に重なりが生じるので、その状態の包装物品1を目的地に置く。
(もっと読む)
物品保持装置
【課題】物品10を保持する複数のグリップ部材26の相互の間隔を、簡単な構造で拡縮する。
【解決手段】ロボットハンド4に取り付けられるベース部材20に、5本のエアシリンダ22を一列に固定する。一端の第1エアシリンダ22Aは、ベース部材に直角に、その次の第2エアシリンダ22Bから第5エアシリンダ22Eまでを順次傾斜角度が大きくなるように傾斜させて固定する。全てのエアシリンダを収縮させてグリップ部材を上昇させた位置から、第5エアシリンダ22Eを伸張させて第5グリップ部材26Eを下降させて物品を保持した後、上昇させ、第4ないし第1グリップ部材26D〜26Aも順次下降、物品の保持、上昇をさせる。その後、一斉にエアシリンダ22を伸張させてグリップ部材26を下降させ、物品10の相互の間隔を接近させた後バケット14内に挿入する。
(もっと読む)
搬送装置
【課題】搬送対象体をスムーズに搬送し得る搬送装置を提供する。
【解決手段】搬送ベルト11上の供給位置P1に供給されたリール部品100を目的位置P4に搬送するベルトコンベア2と、リール部品100を磁力によって吸着する吸着部31および吸着部31を供給位置P1の上方に移動させる移動機構を有して移動状態の搬送ベルト11上の供給位置P1にリール部品100を供給する供給装置4とを備え、吸着部31は、複数のリール部品100を吸着した状態で供給位置P1に位置しているときに、各リール部品100に対する吸着状態および非吸着状態を切り替えて各リール部品100を複数回に分けて供給位置P1に供給する。
(もっと読む)
ワーク選別装置
【課題】軸方向に径差を有する円すいまたは円筒状ワークをその向きによって確実に選別し、機械への逆向き投入を防止する。
【解決手段】軸方向に径差を有する円すい状または円筒状のワークを大径端側を上にした向きに揃えて搬送するワーク選別装置10であって、ワークを縦にした状態で収容できるワークポケット14を外周に複数配置した回転可能な円板状のワークキャリヤ12と、ワークキャリヤ12の下方に位置し、周方向の一部に切除部18を有するキャリヤベース16と、切除部18に対応する周方向領域で、ワークキャリヤ12によって搬送されるワークの移動軌跡に沿った通路とを具備し、通路の幅はワークの小端側径より大きく、ワークの大端側径より小さい。
(もっと読む)
搬送装置
【課題】第1軸方向、第2軸方向の等速移動区間を長くでき、また、第1軸方向および第2軸方向のうち、いずれかの方向で単独で行われる加速・減速の回数を少なくする。
【解決手段】第1軸ガイド8に沿って移動するスライダー9の移動方向J1と、第2軸ガイド10に沿って移動するホルダー11の移動方向J2が、ホルダー11に取り付けられたチャック6の把持および把持解除の前後に行われる垂直方向の上下移動並びに搬送対象物を搬送元から搬送先に向かって運ぶための水平方向の搬送移動とに対し、平行ではなく、チャック6が搬送対象物を把持してから搬送先で把持解除するまでのホルダー11の移動を、第1軸駆動機構によるスライダー9のJ1方向への移動と第2軸駆動機構によるホルダー11のJ2方向への移動とを合成することによって行わせる。
(もっと読む)
21 - 40 / 126
[ Back to top ]