
Fターム[2F065LL00]の内容
光学的手段による測長装置 (194,290) | 光学系 (17,149)
Fターム[2F065LL00]の下位に属するFターム
ライトガイド (1,329)
レンズ;レンズ系 (2,973)
完全反射体 (2,799)
波長選択ミラー(ダイクロイックミラー) (176)
光学フィルター (1,327)
スリット (523)
絞り;シャッター;チョッパー;セクター (1,143)
偏光関連要素 (1,855)
格子 (823)
プリズム (1,230)
拡散板 (195)
指標 (64)
光学要素としてのホログラム (34)
電気光学的効果関連 (196)
磁気光学的効果関連 (18)
音響光学的効果関連 (137)
テレセントリック光学系 (300)
走査光学系 (472)
分光器 (419)
Fターム[2F065LL00]に分類される特許
61 - 80 / 1,136
接触式プローブおよび形状測定装置
【課題】 プローブの伸び、及び周辺空気の温度、湿度の影響を抑えた高精度な形状測定を行うことのできる形状測定用の接触式プローブおよび形状測定装置を提供する。
【解決手段】 プローブシャフト2と先端球16を備えた接触式プローブ1において、
前記プローブシャフト2内の測長光路の少なくとも一部に透明体を設けることにより、少なくともこの部分だけ空気に暴露された光路を減らすことができる。その結果、外気の屈折率変化による測定誤差を抑え、精度を向上させることができる。
(もっと読む)
パターン形状検査方法及びその装置

【課題】パターンの形状測定において、対象構造が計測可能か、又はどの程度の誤差が生じるかを分光反射率測定により事前に知る。
【解決手段】繰り返しパターンを分光検出して分光反射率を求めるとともに検出時に生じる検出波長ごとのノイズの量を求め、分光反射率の情報及び検出時に生じる検出波長ごとのノイズの量の情報と、繰り返しパターンの屈折率と消衰係数とを含む光学的材質の情報及び繰り返しパターンの形状の情報とを用いて繰り返しパターンの形状を算出して所定の精度で繰り返しパターンを計測することが可能かを評価し、評価した結果所定の精度で計測可能と判定した場合に繰り返しパターンと同一のパターンが形成された基板を順次分光検出してパターンの形状を検査するようにした。
(もっと読む)
測定補助器具およびそれを用いた直径測定方法
【課題】 円形材料等の測定対象物に対し、レーザトラッカーから見て反対側の面の空間座標を測定すること、並びに外周面における任意の高さ位置の空間座標を測定することを可能にする測定補助器具を提供する。
【解決手段】 測定補助器具20は、ターゲットTgを設置するターゲット設置部材21と、その下側に位置固定で設けられ測定対象物Wの上端面に接触させる上端面接触部材22と、その下方に配置され測定対象物Wの周面に接触させる周面接触部材23と、上面接触部材22に対する周面接触部材の高さを調整する高さ調整機構24とを備える。レーザトラッカー1により、測定対象物Wに設けられたターゲットTgにレーザ光Lbを照射し、その反射光からターゲットTgの空間座標を求める。求められた空間座標から、測定対象物Wの外周面における周面接触部材23との接触箇所の空間座標を得る。
(もっと読む)
顕微鏡装置
【課題】マイクロレンズアレイを用いた技術を適用したうえで、解像力を向上させることができ、且つ解像力を任意に変更させることができる顕微鏡装置を提供する。
【解決手段】標本Sからの観察光を集光する観察光学系OS2と、観察光をそれぞれ受ける位置に配列された複数のマイクロレンズMLを有するマイクロレンズアレイ26と、それぞれのマイクロレンズMLに対して複数の画素が割り当てられ、各マイクロレンズMLを介して複数の画素で受光した観察光に基づき撮像データを取得する撮像素子30と、マイクロレンズアレイ26に入射する前の観察光を受ける位置に配置され、観察光を偏向させて観察光が各マイクロレンズMLを介して撮像素子30に受光される位置を相対的に移動させる像シフト装置40と、撮像素子30で取得された撮像データに対して所定の処理を施す画像処理部31とを備えて構成される。
(もっと読む)
寸法測定装置、寸法測定方法及び寸法測定装置用のプログラム
【課題】 低倍率視野内のワークを高倍率視野内へ自動搬送してワークの寸法を高い精度で測定することができる寸法測定装置を提供する。
【解決手段】 XY方向に移動可能な可動ステージ12と、特徴量情報及び測定箇所情報を保持する測定設定データ記憶手段と、ワークWを低倍率で撮影し、低倍率画像を生成する低倍率撮像手段と、特徴量情報に基づいて、低倍率画像におけるワークWの位置及び姿勢を特定するワーク検出手段と、特定された位置及び姿勢に基づいて、ワークWの測定対象箇所が高倍率視野内に収まるように、可動ステージ12を制御するステージ制御手段と、高倍率視野内に移動した測定対象箇所を高倍率で撮影し、高倍率画像を生成する高倍率撮像手段と、測定箇所情報に基づいて、高倍率画像から測定対象箇所のエッジを抽出するエッジ抽出手段と、抽出されたエッジに基づいて、測定対象箇所の寸法値を求める寸法値算出手段により構成される。
(もっと読む)
寸法測定装置、寸法測定方法及び寸法測定装置用のプログラム
【課題】 ワークの寸法を高い精度で測定することができるとともに、被写界深度を越える段差を有するワークであっても、測定対象とする箇所を容易に設定することができる寸法測定装置を提供する。
【解決手段】 可動ステージ12上のワークWを撮影する撮像手段と、可動ステージ12のZ方向の位置が異なる複数のワーク画像を深度合成し、深度合成画像を生成する深度合成手段と、マスターピースを撮影して得られる深度合成画像をマスター画像M1として画面表示するマスター画像表示手段と、マスター画像M1に対し測定対象箇所及び測定方法を指定し、測定箇所情報を生成する測定箇所情報生成手段と、測定箇所情報に基づいて、ワークWを撮影して得られた深度合成画像から測定対象箇所のエッジを抽出するエッジ抽出手段と、抽出されたエッジに基づいて、測定対象箇所の寸法値を求める寸法値算出手段により構成される。
(もっと読む)
白色光走査干渉法を使用した膜厚測定を行うための方法及び装置
【課題】広帯域干渉法によって透明な膜の厚さを測定する方法を提供する。
【解決手段】広帯域干渉法によって膜のコレログラムを作成する工程と、コレログラムにフーリエ変換を適用して、フーリエ位相関数を得る工程と、フーリエ位相関数の線形成分を取り除く工程と、残りの非線形成分に第2積分変換を適用して非線形成分の積分振幅関数を得る工程と、積分振幅関数のピーク位置を特定する工程と、波長に依存する膜の屈折率を考慮して前記膜の厚さを前記ピーク位置の横座標の2倍値として決定する工程と、を含む。最後の2つの工程の代わりに、前記積分振幅関数のピーク位置を特定する工程と、前記ピーク位置の横座標の2倍値として膜の厚みを決定する工程と、を含んでもよい。
(もっと読む)
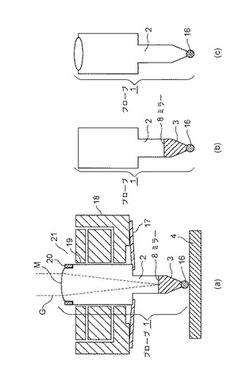
形状測定装置
【課題】プローブの撓みの影響を受けずに高精度の形状測定を行う。
【解決手段】プローブ先端部3に一体に平面ダイクロイックミラー10及び球面ミラー16を設ける。オートコリメータ光学系5により平面ダイクロイックミラー10の傾斜量を測定し、並進移動量測定光学系12により球面ミラー16のX,Y軸方向のずれ量を測定する。ずれ量算出部42bは、測定した平面ダイクロイックミラー10の傾斜量及び球面ミラー16のずれ量に基づいて、プローブ先端部3において被測定物4の表面に接触する接触点となる球19の基準位置に対するX,Y軸方向のずれ量を算出する。推定部42cは、ずれ量算出部42bにより算出されたずれ量から、プローブ先端部3の球19のX,Y軸方向の位置を推定する。
(もっと読む)
光位相測定装置、光位相測定方法およびプログラム
【課題】参照光の位相設定精度に限界がある場合でも、測定対象物による位相シフト量を用いた計測する光位相測定装置を提供する。
【解決手段】コヒーレント光源81、光源よりの光波を2分岐する光分岐手段82、光波のうちの参照光波89を周波数ωmで位相変調する位相変調手段83a、分岐された後に被測定対象物85を透過又は反射した信号光波と位相変調された参照光波89とを合成する光合成手段97と、合成された干渉光の強度を測定する光強度測定手段88を有する光干渉計を備えた光位相測定装置で、干渉光の強度を一定の時間に亘って取得し、取得した時系列の強度信号をフーリエ変換し、位相変調の周波数ωmの整数倍の周波数成分のうち少なくとも2つの成分の光強度を演算して、位相変調手段の変調指数mを同定して、該変調指数mに基づいて前記被測定対象物85による信号光波の位相変化量φを算出する演算手段95を備えた光位相測定装置。
(もっと読む)
光学センサ及び画像形成装置
【課題】対象物の相対的な位置情報を短時間で精度良く検出することができる光学センサを提供する。
【解決手段】 面発光レーザアレイを含む光源11、非平行透明部材12、コリメートレンズ13、対物レンズ14、及び処理装置などを備えている。面発光レーザアレイの複数の発光部から射出された複数の光束は、Z軸方向に関して互いに異なる位置に集光される。そして、処理装置は、面発光レーザアレイの複数の発光部に一定の電圧を印加するとともに、発光部毎にセルフミキシング信号をプリンタ制御装置に出力する。プリンタ制御装置は、各発光部のセルフミキシング信号に基づいて、Z軸方向に関する記録紙との距離を求める。
(もっと読む)
計測装置
【課題】光路長差が小さくなっても被加工物の厚みまたは上面高さ位置を正確に計測することができる計測装置を提供する。
【解決手段】被加工物保持手段に保持された被加工物の基準面から上面までの距離を計測する計測装置であって、被加工物の上面で反射した反射光と基準面で反射した基準反射光を受光したイメージセンサーからの検出信号に基づいて分光干渉波形を求め、この分光干渉波形における各波長毎の隣接する1またはn個隣の光強度との差を演算して分光干渉差分波形を求め、分光干渉差分波形と理論上の波形関数に基づいて波形解析を実行し、被加工物の上面で反射した反射光の光路長と基準面で反射した基準反射光の光路長との光路長差に基づいて被加工物の基準面から上面までの距離を求める。
(もっと読む)
計測方法及び計測装置
【課題】非球面を含む被検面の計測に有利な技術を提供する。
【解決手段】非球面を含む被検面を照明する第1の光学系と前記被検面からの光を検出面を有する検出部に導く第2の光学系と、既知の非球面形状を有する基準面を前記検出面と共役な面に配置し、前記基準面からの光が前記検出面に入射する角度を前記検出面上の複数の座標のそれぞれについて前記検出部で検出する第1のステップと、前記被検面を前記共役な面に配置し、前記被検面からの光が前記検出面に入射する角度を前記検出面上の複数の座標のそれぞれについて前記検出部で検出する第2のステップと、前記第1のステップで検出された角度と前記第2のステップで検出された角度との角度差により、前記被検面の面形状と前記既知の非球面形状との差分形状を求め、前記既知の非球面形状に前記差分形状を加えることで前記被検面の面形状を算出する計測方法を提供する。
(もっと読む)
内部欠陥検査方法及びその装置
【課題】
試料表面に非接触で超音波励起を行い、超音波を励起した点を光干渉計測する手段を用いた非接触で試料内部の観察を行うことにより、稼動部分が無く、コンパクトな構成で、高感度で非破壊・非接触に内部欠陥を検査する。
【解決手段】
検査対象の試料から離れた場所から超音波を発射してこの超音波を試料に照射し、この試料の表面の超音波が照射された箇所に偏光の状態が制御された偏光光を照射し、この偏光光が照射された試料の表面からの反射・散乱光のうち照射した偏光光と同じ偏光特性を持つ光を光検出器で検出し、この光検出器で検出した信号を処理して試料の内部の欠陥を検出する内部欠陥検査方法及びその装置とした。
(もっと読む)
クロストーク補正係数算出方法およびクロストーク補正係数算出装置およびこれを用いた三次元表面形状測定装置
【課題】 複数波長による表面形状の測定方法およびこれを用いた装置によって測定する場合に発生するクロストーク現象のクロストーク補正係数を算出する。
【解決手段】 測定対象面の平面領域内から輝度の異なる6点以上の干渉輝度信号を取得し、前記輝度信号に干渉縞モデルとクロストークモデルとの組み合わせを適合(フィッティング)することにより、クロストーク補正係数を一括して算出するクロストーク補正係数算出方法、また、該方法を実行できる装置を提供する。
(もっと読む)
検出装置
【課題】合焦精度を向上させる。
【解決手段】高感度のラインセンサ16Bは、レーザ照明部11により照明された対象物2の光点像の光量から得られる高輝度の受光データを取得し、低感度のラインセンサ16Aは、対象物2の光点像の光量から得られる低輝度の受光データを取得し、データ処理部17は、正常時は、高感度のラインセンサ16Bからの高輝度の受光データを選択し、高輝度の受光データを得るときのレーザ光が飽和した場合、低輝度の受光データを選択する。そして、検出部18は、データ処理部17により選択された受光データに基づいて、対象物2の像の合焦状態を検出することで、対象物2の像の合焦状態が確実に検出されるので、合焦精度を向上させることができる。本発明は、例えば、対象物の断面形状を測定する測定装置に用いられる位置検出装置に適用することができる。
(もっと読む)
基板検査方法
【課題】 基板に実装された部品を検査する基板検査方法に関わり、より詳細には正確な端子領域を検出して部品の実装状態を検査することのできる基板検査方法を提供する。
【解決手段】印刷回路基板上に形成された部品の端子のチップ位置設定方法は基板上に形成された部品の端子と隣接して形成されたハンダに対して測定された測定高さを設定された基準高さと比較して仮象チップラインを設定することと、端子の長さ方向に沿って端子の幅方向に関する中心ラインを設定することと、仮象チップライン及び中心ラインの交差点から中心ラインによる測定高さを用いて端子のチップ位置を設定することと、を含む。従って、より正確な端子のチップ位置を獲得することができる。
(もっと読む)
透光性管状物体の厚さ測定装置
【課題】 透光性管状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 測定用レーザ光をガルバノミラー35で反射させてガラス管Gに照射し、ガラス管Gの外周面で反射する反射光及び内周面で反射する反射光をラインセンサ39で受光し、反射光の受光位置からガラス管Gの厚さを検出する。サーボ用レーザ光源40からのサーボ用レーザ光をガルバノミラー35で反射させて、ガラス管Gにおける測定用レーザ光の照射位置又はその近傍位置にZ軸方向から照射する。フォトディテクタ48でガラス管Gからのサーボ用レーザ光の反射光を受光し、Y軸方向エラー信号生成回路119、Y軸方向サーボ回路120及びY軸方向ドライブ回路121が、モータ36を駆動制御することにより、測定用レーザ光の光軸がガラス管Gの中心軸と交差するようにガルバノミラー35のX軸線周りの回転をサーボ制御する。
(もっと読む)
位置検出装置、位置検出方法、マイケルソン干渉計、およびフーリエ変換分光分析装置
【課題】簡素な構成からなる位置検出装置を得る。
【解決手段】所定の移動方向(矢印AR)に移動する板ばね部41(被測定物)の位置を検出する位置検出装置70は、受光部72Aと、受光部72Aに対向し受光部72Aに向けて測定光80を投光する投光部71Aとを備える。受光部72Aおよび投光部71Aは、受光部72Aおよび投光部71Aの間で移動する板ばね部41の移動方向(矢印AR)に対して、測定光80が斜めに交差するように配置される。板ばね部41の移動に伴って、測定光80の一部は板ばね部41に遮られるとともに、測定光80の残部は受光部72Aに到達する。受光部72Aが受光する測定光80の残部の受光量に基づいて、板ばね部41の位置が検出される。
(もっと読む)
計測装置
【課題】参照面と被検面との間の絶対距離を広範囲、且つ、高精度に計測することができる技術を提供する。
【解決手段】参照面RSと被検面TSとの間の絶対距離を計測する計測装置1であって、互いに異なる吸収線をそれぞれ有する複数の種類のガスが封入されたガスセル112を含む波長基準素子と、参照面RSで反射された第1の光と被検面TSで反射された第2の光との干渉信号を検出して、参照面RSと被検面TSとの間の光路長に対応する位相を検出する位相検出部122と、波長基準素子を用いて、光源102から射出される光の波長を互いに異なる複数の吸収線に対応する互いに異なる複数の波長のそれぞれに設定し、互いに異なる複数の波長のそれぞれについて、参照面RSと被検面TSとの間の光路長に対応する位相を検出するように位相検出部122を制御して、前記絶対距離を求める処理を行う処理部128と、を有する。
(もっと読む)
三次元形状測定装置、三次元形状測定方法、構造物の製造方法および構造物製造システム
【課題】光源の光量に変化があった場合であっても、三次元形状を精度良く算出することができる。
【解決手段】三次元形状測定装置1は、メイン光源22が発光した光を縞パターンに変換して測定対象物11上に投影する投影部13と、測定対象物11を撮像する撮像部14と、投影部13が投影する縞パターンの位相を変化させながら、撮像部14に測定対象物11の撮像を繰り返しさせるとともに、縞パターンの画像を複数順に取得する制御部と、メイン光源22の光量の変化量を検出し、当該検出した変化量が所定の値以上である場合に、当該検出した変化量に基づいて前記縞パターンの画像を補正し、当該補正した縞パターンの画像に基づいて、測定対象物11の三次元形状を算出する形状算出部と、を備える。
(もっと読む)
61 - 80 / 1,136
[ Back to top ]