
Fターム[2F065CC00]の内容
光学的手段による測長装置 (194,290) | 対象物−個別例 (8,635)
Fターム[2F065CC00]の下位に属するFターム
プリント基板 (376)
フィルム;シート (476)
磁気ディスク;光ディスク (101)
ねじ (34)
歯車 (13)
鋼板 (147)
H型鋼、T型鋼 (20)
タービンブレード (54)
アンテナ (1)
工具 (120)
車両;自動車 (618)
車輪 (66)
タイヤ (136)
建築物 (337)
溶接部 (101)
人体;動物 (953)
半導体製造関連 (1,910)
光学要素 (628)
電子部品関連 (997)
付着膜;蒸着膜 (441)
エッチング (11)
トロリー線 (55)
レール (54)
磁気ヘッド (2)
炉内堆積物 (23)
路面;トンネル内面 (196)
Fターム[2F065CC00]に分類される特許
741 - 760 / 765
2次元画像のコピー画像に領域指定した画像を中間画像とし、3次元画像を形成および体積を測定するシステム

【課題】特徴ある画像の領域指定を行なうことにより、2次元画像の接触・重なりにかかわらず3次元画像を形成し、体積を測定するコンピュータ等のシステムを提供する。
【解決手段】2次元画像をディスプレイに表示しA1、その2次元画像のコピー画像A2を中間画像として領域指定を行ないA3、その領域毎にA4、位置と高さ情報を読み取りA5、領域指定毎3次元画像を形成しA6、体積を測定するA7。A1〜A7の機能を有した3次元画像形成および体積測定システム。
(もっと読む)
巻上機における貨物の位置検出方法とその装置
本発明は巻上機における貨物又は吊り具の位置を検出する方法と装置に関する。この巻上機は貨物を移送するためのトロリを有し、該トロリに能動光源とカメラが設けられ、この両部品は貨物の方向に向けられる。貨物又は吊り具は、貨物又は吊り具の位置を検出するための少なくとも1つのマークを有し、該マークは能動光源を有し、トロリにおける能動光源から光信号がマークの方向に送信され、該マークから光信号の認識後に別の光信号がカメラに向けて送信される。この結果、位置検出の信頼性を向上できる。  (もっと読む)
(もっと読む)
パイプ検査システムの制御方法および検査データの評価方法

【課題】本発明は、相互に直交する2本の軸線の周囲で旋回できるカメラヘッドを含む自動パイプ検査装置を操作する方法に関するものである。
【解決手段】前記カメラヘッドの旋回運動はモータにより遠隔制御され、少なくとも一方の旋回運動は回転角度センサにより測定され、その測定信号をモニターに表示して評価できる。本発明の目的は、パイプ検査装置を制御し、修正データを評価する方法を提供することであり、この方法は改良された評価と、検査結果の量的で質的な記録を容易にする。この目的を達成するため、2セットの画像情報が発生され、第1セットは全パイプ表面の画像情報を含み、第2セットはパイプ表面の細部についての情報を含み、両方のセット情報は、パイプ部分の場所および角度位置に関して少なくとも相互に自動的に割り当てられる。
(もっと読む)
共焦点観察システム、光照射方法、及び光照射プログラム
【課題】標本の三次元像中の任意の三次元領域を指定することにより、光刺激やフォトブリーチを、標本中の対応する領域に正確に行うことができ、立体構造を有する標本の光刺激後の挙動解析を正確に行うことができるようにする。
【解決手段】立体標本9の光学的断面画像を取得する走査光学系A及び検出光学系Bと、これにより取得された光学的断面画像から三次元像を構築する処理や、構築された三次元像中の所望の三次元領域を指定する処理や、指定された三次元領域に基づき励起光又は刺激光を照射するための断面領域を取得する処理や、取得された断面領域に対応する立体標本9の領域に励起光又は刺激光を照射する処理等を行うコントロールユニット14等を有するよう、共焦点観察システムである共焦点レーザ顕微鏡装置を構成する。
(もっと読む)
光学フィルムの検査方法
【課題】 厚さムラに起因する欠陥の検査を的確に行うことができる光学フィルムの検査方法を提供すること。
【解決手段】 本発明は、液晶をハイブリッドネマチック配向させた液晶フィルム2を含む光学フィルム1の検査方法であって、光学フィルム1に対し、光源20から偏光板18aを通して光を照射し、液晶をハイブリッドネマチック配向させた液晶フィルム31と偏光板18bを積層した素子29を、液晶フィルム31を光学フィルム1側に向け且つ液晶フィルム31の配向軸43を液晶フィルム2の配向軸42と非平行となるように配置して光学フィルム1を検査する方法である。この場合、光源20からの光が偏光板18a、光学フィルム1を透過すると、無欠陥部分と欠陥部分とで位相差に差をつけることができ、無欠陥部分と欠陥部分との間にコントラストを生じさせることができる。
(もっと読む)
車両座席用長手方向アジャスタ
【課題】車両座席用、特に自動車座席用長手方向アジャスタを提供すること。
【解決手段】少なくとも1つの第1座席レール(5)と、前記第1座席レール(5)に対して移動可能でその中で案内される少なくとも1つの第2座席レール(8)と、前記第1座席レール(5)を第2座席レール(8)にロックするための少なくとも1つのロック装置(11)であって、前記第1座席レール(5)のロック列(19)がロック装置(11)に対応付けられているロック装置(11)と、センサ(24)を有する位置認識装置(20)とを備えた車両座席用、特に自動車座席用長手方向アジャスタにおいて、前記センサ(24)がロック列(19)と協働すること。
(もっと読む)
光ファイバによる2点間変位計及び光ファイバによる2点間変位遠隔監視方法
【課題】
常時又は地震時等の災害時に於ける構造物、特に、2点間の変位量を所定の遠隔地に於いても迅速かつ適正に検出できる技術を提供する。
【解決手段】
構造物としての一方の桁35、構造物としての他方の桁36に於いて、該一方の桁35と他方の桁36の相互間の下方位置には橋台又は橋脚37が配置してある。該橋脚37は躯体で構成してもよい。上記橋脚37は、上面に2点間変位計38を配置し、上記2点間変位計38は、上記光ファイバ固定治具及び複数列で構成された複数個又は多数固のプーリーでなる回転可能な光ファイバ巻回部材及びコイルバネ等でなる変位・荷重変換部材を搭載する。この2点間変位計38から歪みセンサ機能を有する一方側及び他方側の光ファイバ39、40を引出すと共に該一方側の光ファイバ39をBOTDR計測器46に接続する。
(もっと読む)
直径測定デバイス
フェルールクリンプ(80)によりカン(10)に取り付けられる吸入カンバルブ(30)のうち、無機能の可能性のある吸入カンバルブ(30)の検出方法であって、直径測定手段(230)に対して所定の測定高さにカン(10)を保持するために配置されるカン治具(220)内にカン(10)を配置し、所定の高さでフェルールクリンプ(80)の直径を測定し、測定されたクリンプの直径を、容認されるべき所定の間隔と比較し、もし測定された直径が所定の間隔を外れる範囲にあれば、吸入カンバルブ(30)を無機能の可能性のあるものとして判別するステップを有している方法。また、基部(210)と、上記基部(210)により支持される直径測定手段(230)と、上記基部(210)により支持されるカン治具(220)であって、上記直径測定手段(230)に対して所定の測定高さで、その内部にカン(10)を保持するように構成されたカン治具(220)と、を有しているクリンプ直径測定デバイスも提供される。 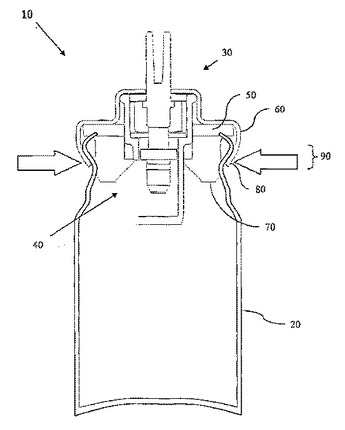 (もっと読む)
(もっと読む)
光学式位置決め装置におけるスペックルサイジング及びセンサ寸法
一実施形態は、一連のフレームにおける光学的特徴の変位を判定することにより一表面に対するデータ入力装置の横方向変位を検知するための光学式変位センサに関するものである。該センサは、少なくともコヒーレント光源(306)、前記表面(304)の一部を照明するための照明用光学系(308)、イメージング用光学系(310)、及び周期的な距離を有する感光素子の第1のアレイ(302)を含む。照明手段及び検出器は、照明された前記表面の部分から反射された光の強度パターンを前記感光素子の第1のアレイ(302)上に生じさせるよう構成される。該強度パターンは、前記アレイ(302)の前記周期的な距離の0.5〜2倍の間の平均スペックル直径を有する複数のスペックルを含む。 (もっと読む)
回転体の異常感知装置
光ファイバブラッグ格子FBGセンサが各固定体に回転可能に設けられた回転軸により支持される回転体に設けられる。FBGセンサは回転軸に沿って延長され、一端は回転軸の一端の中心に配置される。光ファイバが固定体に設けられ、一端がFBGセンサから離れてFBGセンサの端部と対向するように配置される。多波長の光源から放射された光は光ファイバを通じて光ファイバとFBGセンサ間の間隙を横切ってFBGセンサに伝達される。FBGセンサは回転体の変形に対応する周波数の光を反射する。データ処理ユニットが反射された光を受けて、それに基づいて回転体の変形を算出する。  (もっと読む)
(もっと読む)
物体の密度と寸法特性を測定する方法およびシステムならびに製造中の核燃料ペレットを検査する応用例
物体(100)の質量密度を自動的に測定するシステムは、
前記物体(100)の有意寸法(x)を測定する装置(2)と、
前記物体(100)の通過により減衰した光子線の強度(I)を測定する装置(30)と、
捕捉、処理および分析装置(200)と、
物体(100)を移送する手段(70、72、80、82、84、86、88)と、
物体(100)の位置を調整する第1の手段(74、76、78)と、
物体(100)の位置を調整する第2の手段(90、92、94、96、98)とを含む。
前述のシステムを利用する方法は、装置2および30の構成部を較正するステップと、物体の有意寸法を実際に測定するステップ(100)とを含む。前記ステップは、物体の集合の中の各物体(100)に実行される。  (もっと読む)
(もっと読む)
マクロカンチレバーのような複数のマイクロ及びナノメカニカル要素の変位を検出するためのシステム及び方法
【課題】マイクロカンチレバーの変位(撓みなど)及び/又は移動を検出することによって測定が実施される例えばマイクロカンチレバーに基づく測定システムでの使用に適する機械的要素の変位の検出のためのシステム及び方法を提供する。
【解決手段】本発明は、光ビーム(4)をアレイ(2)に向けて放出することにより、かつ反射光ビームを光位置検出器上で受光することにより、アレイ(2)の一部を形成するマイクロカンチレバーのような複数の要素(1)の撓みのような変位を検出し、それによって光ビームの入射位置が対応する要素の変位によって判断されるシステム及び方法に関する。システムは、光ビームが個々の要素(1)によってアレイ(2)に沿って順番に反射されるように、光ビーム(4)をアレイ(2)に沿って変位させるための走査手段(7)と、光ビームが要素によって反射された時を検出するための反射検出手段(11)とを更に含む。システムは、光ビームが要素によって反射されたことを反射検出手段(11)が検出した時に、検出器上の光の対応する入射位置が要素の変位の指示として取られるように配置される。
(もっと読む)
パンタグラフのすり板検査装置。
【課題】
従来のカメラによるパンタグラフすり板の検査では、すり板側面の照明を当ててパンタグラフを撮像していたが、この方法では、すり板上面と側面を高精度に分離することが難しかった。
【解決手段】
カメラでパンタグラフを撮像する際に、パンタグラフすり板上面を照射するストロボ照明と、パンタすり板側面を照射するストロボ照明を設け、すり板上面を照射するストロボ光に比べてすり板側面を照射するストロボ光の光量を少なくして撮像する構成とした。
(もっと読む)
表面の形状を測定する装置および方法
本発明は、床などの硬質または半硬質基板上で用いるための表面形状測定装置を提供する。本装置は、(a)ビームと、(b)ビームに装着される少なくとも1つのビームサポートと、(c)該ビームに摺動可能に接続され、かつ表面までの距離を測定するように構成されるセンサアセンブリと、(d)該ビームに沿って該センサアセンブリの位置を測定するように構成される変換器アセンブリとを含む。  (もっと読む)
(もっと読む)
ベルト特性検出方法、及び、ベルト特性検出装置
製品タイヤの品質管理を高めることができるベルト特性検出方法、及び、ベルト特性検出装置を提供することを課題とする。
ベルト特性検出装置は、ドラム21上に貼付されたベルト22の特性を検出する装置であり、ドラム回転軸に沿ったドラム外周面上の直線上の2点の照射位置28R、28Lにレーザ光をそれぞれ照射し、各反射光を計測することにより照射位置28R、28Lの半径方向変位を計測するレーザ変位計と、レーザ変位計から計測信号を受信し、照射位置28R、28Lの半径方向変位の差分を算出する演算部と、演算部で算出された差分の正負と、ドラム21の回転方向と、に基づいて、ベルト22の進行方向Rの端縁22Eの向きが右上がりか左上がりかを検出する検出部と、を備えている。これにより、差分の正負によって、端縁28Eが右上がりか左上がりかを容易に検出することができる。
(もっと読む)
リソグラフィ装置、較正方法、較正プレート、デバイス製造方法及びそれにより製造されたデバイス
本発明の一実施例による方法は、少なくとも1つのアライメント・マーカ40と、少なくとも1つのハイト・プロファイル46とを有する較正プレート38を使用して実行することができる。最初に、アライメント・センサを使用して較正プレートが配置される。次に、ハイト・センサを使用してハイト・プロファイルが測定される。次に、較正プレートを実質的に180度回転し、上記2つの操作が繰り返される。この処理手順によって2つの測定されたハイト・プロファイルが得られ、最適フィットを見出すべく、得られた2つの測定されたハイト・プロファイルが比較される。最適フィットを見出すために実行されるシフトの量を使用して、アライメント・マーカとハイト・センサの測定ポイントのX−Y位置の間の距離が決定される。  (もっと読む)
(もっと読む)
投影露光装置及びステージ装置、並びに露光方法
投影露光装置(100)は、基板(W)が載置されるとともに、その基板を保持して移動可能な基板テーブル(30)と、基板テーブルの位置情報を計測する位置計測系(18等)と、液体の供給に起因して基板と基板テーブルとの少なくとも一方に生じる位置ずれを補正する補正装置(19)とを備えている。この場合、補正装置により、液体の供給に起因して基板と基板テーブルとの少なくとも一方に生じる位置ずれが補正される。これにより、基板に対して液浸法を利用した高精度な露光を行う。 (もっと読む)
パイプ端部における内外部形状自動測定装置
パイプ(1)の端部における内部および外部プロファイルを自動的に測定する装置が説明され、ここでセンサー(11a、11b)は支持体(10)の各回転角度に対して対応するプロファイルの距離を測り、測定されるパイプの軸線(X−X)に平行な方向に滑動自在なスライド(13)に、回転自在に取付けられた支持体の回転軸高さを調整するための手段が設けられる。この測定システムはまた、測定されたパイプの端部に分類コードを帰すための検出されたデータの処理を備えている。 (もっと読む)
試料の面積またはコンフルエンスを決定するための方法と装置
試料の面積またはコンフルエンスは、試料と試料の周りのバックグラウンドに関する定量的位相データを得ることにより決定される。試料の境界は、位相データ測定値のヒストグラムを作成し、ヒストグラムの導関数を取って、それにより最大スロープの点を決定することにより、定量的位相データから決定される。境界に適用可能なデータ値を求めるために、既定のデータ値を上回るか下回るデータ値は試料内にあると見なすように導関数上の最もよく適合する線が使用される。 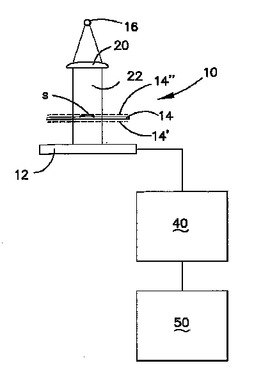 (もっと読む)
(もっと読む)
立体計測装置
【課題】ワークの立体形状を正確に計測する。
【解決手段】立体計測システムは、ワーク1100を撮像するカメラ100と、ワーク1100を照明するストロボ200と、カメラ100の電子シャッターに同期してストロボ200を発光させてワーク1100を撮像するように制御する制御回路と、撮像された画像データを画像処理する画像処理コンピュータとを含む。画像処理コンピュータは、撮像された画像データに対して、明度の不均一を補正するシェーディング補正回路と、補正された画像データに対して、カメラ100からワーク1100までの距離に応じた明度の違いに基づいて、ワーク1100の特徴量を算出する算出回路と、算出された特徴量に基づいて、ワーク1100の位置情報を作成する作成回路とを含む。
(もっと読む)
741 - 760 / 765
[ Back to top ]