
ジョイント機構およびジョイント機構を備える操作部を有する装置
【課題】頭部材に加えられた水平方向の回転力により頭保持部材を水平方向に回転させることが可能なジョイント機構を提供する。
【解決手段】このジョイント機構1は、少なくとも一部に球状の表面を有する頭部12を含む球頭パーツ10と、球頭パーツ10を傾倒動作させることが可能なように球頭パーツ10の球状の表面を保持する球頭保持パーツ20とを備える。また、球頭パーツ10の頭部12には、突起部15が設けられている。また、球頭保持パーツ20には、球頭パーツ10の突起部15に対して球頭パーツ10に加えられる水平方向の回転力を伝達可能に係合する突起係合部22が設けられている。
【解決手段】このジョイント機構1は、少なくとも一部に球状の表面を有する頭部12を含む球頭パーツ10と、球頭パーツ10を傾倒動作させることが可能なように球頭パーツ10の球状の表面を保持する球頭保持パーツ20とを備える。また、球頭パーツ10の頭部12には、突起部15が設けられている。また、球頭保持パーツ20には、球頭パーツ10の突起部15に対して球頭パーツ10に加えられる水平方向の回転力を伝達可能に係合する突起係合部22が設けられている。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、ジョイント機構およびジョイント機構を備える操作部を有する装置に関し、特に、頭部材と頭部材を保持する頭保持部材とを備える、ジョイント機構およびジョイント機構を備える操作部を有する装置に関する。
【背景技術】
【0002】
従来、頭部材と頭部材を保持する頭保持部材とを備えるジョイント機構およびジョイント機構を備える操作部を有する装置が知られている(たとえば、特許文献1参照)。
【0003】
上記特許文献1には、外周面に沿って90度の角度間隔で4つの突起が形成された球頭(頭部材)と、球頭を回転可能に保持する球面軸受が形成されたキャッチパーツ(頭保持部材)とを備えるボールジョイント(ジョイント機構)が開示されている。このボールジョイントのキャッチパーツの球面軸受の外縁部には、外縁部に沿って90度の角度間隔で4つの凹形状の溝部が形成されている。この4つの凹形状の溝部の各々には、球頭の外周面に形成された4つの突起の各々が係合するように構成されている。また、球頭には、ユーザにより手動で水平方向に回転操作することが可能な連結軸が設けられている。そして、球頭が球面軸受に取り付けられた状態において、ユーザにより球頭に設けられた連結軸が水平方向に回転操作されることにより、球頭に形成された4つの突起の各々が球面軸受の4つの凹形状の溝部の各々から外れて球頭が回転するように構成されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平11−101221号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1に記載のボールジョイントでは、ユーザにより球頭に設けられた連結軸が水平方向に回転操作された場合には、球頭に形成された4つの突起の各々が球面軸受の4つの凹形状の溝部の各々から外れてしまうため、球頭に加えられた水平方向の回転力を球面軸受に伝達することができないという不都合がある。このため、キャッチパーツを水平方向に回転させることが困難であるという問題点がある。
【0006】
この発明は、上記のような課題を解決するためになされたものであり、この発明の1つの目的は、頭部材に加えられた水平方向の回転力により頭保持部材を水平方向に回転させることが可能なジョイント機構およびジョイント機構を備える操作部を有する装置を提供することである。
【課題を解決するための手段】
【0007】
この発明の第1の局面によるジョイント機構は、少なくとも一部に球状の表面を有する頭部を含む頭部材と、頭部材を傾倒動作させることが可能なように頭部材の球状の表面を保持する頭保持部材とを備え、頭部材の頭部には、突起部が設けられ、頭保持部材には、頭部材の突起部に対して頭部材に加えられる水平方向の回転力を伝達可能に係合する突起係合部が設けられている。
【0008】
この第1の局面によるジョイント機構では、上記のように、頭部材の頭部に、突起部を設け、頭保持部材に、頭部材の突起部に対して頭部材に加えられる水平方向の回転力を伝達可能に係合する突起係合部を設けることによって、頭部材の頭部に水平方向の回転力が加えられた場合に、頭部材の頭部に加えられた水平方向の回転力を頭部材の頭部の突起部を介して頭保持部材の突起係合部に確実に伝達することができるので、頭部材に加えられた水平方向の回転力により頭保持部材を水平方向に回転させることができる。また、頭部材と頭保持部材とによりジョイント機構を構成することができるので、比較的部品点数が多いユニバーサルジョイント機構などに比べて、部品点数の増加を抑制することができる。また、部品点数が少ないことにより、ジョイント機構の組立作業性を向上させることができる。
【0009】
上記第1の局面によるジョイント機構において、好ましくは、頭保持部材の突起係合部は、頭部材の突起部の幅と略同じ幅を有するくびれ部を含み、頭部材に水平方向の回転力が加えられた場合に、頭部材の突起部と頭保持部材の突起係合部のくびれ部とが水平方向の回転力を伝達可能に係合することにより、頭部材が水平方向に回転するように構成されている。このように構成すれば、頭保持部材の突起係合部のくびれ部の幅が頭部材の頭部の突起部の幅よりも大きい場合と異なり、頭部材に水平方向の回転力が加えられた場合に、突起部とくびれ部との間のがたつきを小さくすることができるので、回転量を精度よく調整することができる。
【0010】
この場合、好ましくは、頭保持部材の突起係合部は、くびれ部を挟むように設けられ、くびれ部の幅よりも大きい幅を有する幅広部をさらに含み、頭部材が垂直に配置された状態から頭部材が平面視で最も大きく傾倒する方向に傾倒動作するように頭部材に外力が加えられた場合に、突起部は、突起係合部のくびれ部および幅広部の内表面部に沿って移動するように構成されている。このように構成すれば、くびれ部により水平方向の回転力を伝達しながら、幅広部により容易に頭部材が最も大きく傾倒する方向に傾倒動作させることができる。
【0011】
上記くびれ部および幅広部を含む突起係合部を備えるジョイント機構において、好ましくは、突起部は、円柱形状を有し、突起係合部は、くびれ部から幅広部に沿って円弧形状を有し、頭部材が垂直に配置された状態から頭部材が平面視で最も大きく傾倒する方向に傾倒動作するように頭部材に外力が加えられた場合に、円柱形状の突起部の外表面部は、突起係合部のくびれ部から幅広部に沿った円弧形状の内表面部に沿って移動するように構成されている。このように構成すれば、たとえば、突起部が三角柱形状や四角柱形状に形成される場合と異なり、円柱形状の突起部を円弧形状を有する突起係合部のくびれ部および幅広部の内表面部に沿ってより滑らかに(安定して)移動させることができる。
【0012】
上記くびれ部および幅広部を含む突起係合部を備えるジョイント機構において、好ましくは、突起係合部は、くびれ部とくびれ部を挟むように設けられた幅広部とにより瓢箪形状を有するように形成されている。このように構成すれば、突起係合部の形状を瓢箪形状にすることにより、容易に、くびれ部とくびれ部を挟むように設けられた幅広部とを有する突起係合部を構成することができる。
【0013】
上記瓢箪形状を有する突起係合部を備えるジョイント機構において、好ましくは、瓢箪形状の突起係合部は、くびれ部と幅広部とを含む長穴である。このように構成すれば、頭部材が垂直に配置された状態から頭部材が平面視で最も大きく傾倒する方向に傾倒動作するように頭部材に外力が加えられた場合に、容易に、突起部を突起係合部のくびれ部と幅広部とを含む長穴の内表面部に沿って滑らかに(安定して)移動させることができる。
【0014】
上記第1の局面によるジョイント機構において、好ましくは、頭部材が略垂直に配置されるように頭部材を付勢する付勢部材をさらに備え、頭部の下方部分には、付勢部材が取り付けられる取付部が形成されており、頭部の下方部分に形成された取付部に弾性部材が取り付けられることにより、頭部材に傾倒動作させる外力が加えられていない場合に、頭部材の中心軸が略垂直を維持するように構成されている。このように構成すれば、頭部材に傾倒動作させる外力が加えられていない状態で、頭部材を中心軸が略垂直になるように維持することができる。また、頭部材に加えられた傾倒動作させる外力が解除された際に、自動的に頭部材の中心軸を略垂直の位置に戻す(復帰させる)ことができる。
【0015】
この場合、好ましくは、取付部は、頭部の下方部分の一部を切り欠いて形成された平坦面部を含み、付勢部材は、平坦面部に取り付けられる圧縮コイルバネを含む。このように構成すれば、頭部材に傾倒動作させる外力が加えられていない場合に、圧縮コイルバネにより、容易に、頭部材の垂直位置の維持および垂直位置への自動復帰を行うことができる。
【0016】
上記第1の局面によるジョイント機構において、好ましくは、突起部の中心軸は、頭部材の中心軸に対して垂直方向で、かつ、頭部の中心近傍に配置されている。このように構成すれば、突起部の中心軸が頭部材の中心軸に対して垂直方向以外の方向で、かつ、頭部の中心近傍以外の部分に配置される場合と異なり、頭部に水平方向の回転力が加えられた場合に、確実に、水平方向の回転力を頭保持部材に伝達することができる。
【0017】
上記第1の局面によるジョイント機構において、好ましくは、頭保持部材の突起係合部は、頭部材の突起部の幅と略同じ幅を有するくびれ部と、くびれ部を挟むように設けられ、くびれ部の幅よりも大きい幅を有する幅広部とを含み、頭保持部材の突起係合部は、幅広部の幅と略同じ幅で下方に延びるように形成された溝部をさらに含む。このように構成すれば、頭部材を頭保持部材に組み付ける際に、容易に、頭部材の突起部を頭保持部材の突起係合部の溝部を介して突起係合部に組み付けることができる。
【0018】
この発明の第2の局面によるジョイント機構を備える操作部を有する装置は、操作部に内蔵され、少なくとも一部に球状の表面を有する頭部を含む頭部材と、頭部材を傾倒動作させることが可能なように頭部材の球状の表面を保持する頭保持部材とを含むジョイント機構を備え、頭部材の頭部には、突起部が設けられ、頭保持部材には、頭部材の突起部に対して頭部材に加えられる水平方向の回転力を伝達可能に係合する突起係合部が設けられている。
【0019】
この第2の局面によるジョイント機構を備える操作部を有する装置では、上記のように、頭部材の頭部に、突起部を設け、頭保持部材に、頭部材の突起部に対して頭部材に加えられる水平方向の回転力を伝達可能に係合する突起係合部を設けることによって、頭部材の頭部に水平方向の回転力が加えられた場合に、頭部材の頭部に加えられた水平方向の回転力を頭部材の頭部の突起部を介して頭保持部材の突起係合部に確実に伝達することができるので、頭部材に加えられた水平方向の回転力により頭保持部材を水平方向に回転させることができる。
【発明の効果】
【0020】
本発明によれば、上記のように、頭部材に加えられた水平方向の回転力により頭保持部材を水平方向に回転させることができる。
【図面の簡単な説明】
【0021】
【図1】本発明の一実施形態によるハプティックコントローラの全体斜視図である。
【図2】図1の200−200線に沿った断面斜視図である。
【図3】本発明の一実施形態によるジョイント機構の全体斜視図である。
【図4】本発明の一実施形態によるジョイント機構の分解斜視図である。
【図5】本発明の一実施形態によるジョイント機構の上面図(平面図)である。
【図6】本発明の一実施形態によるジョイント機構の正面図である。
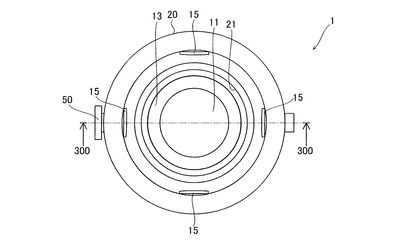
【図7】図5の300−300線に沿った断面図である。
【図8】本発明の一実施形態によるジョイント機構の球頭パーツの正面図である。
【図9】本発明の一実施形態によるジョイント機構の球頭パーツを斜め下方から見た斜視図である。
【図10】本発明の一実施形態によるジョイント機構の球頭保持パーツの正面図である。
【図11】図10の400−400線に沿った断面図である。
【図12】本発明の一実施形態によるジョイント機構の球頭パーツを0度方向に傾倒動作させた場合を示す上面図(平面図)である。
【図13】本発明の一実施形態によるジョイント機構の球頭パーツを0度方向に傾倒動作させた場合を示す正面図である。
【図14】本発明の一実施形態によるジョイント機構の球頭パーツを45度方向に傾倒動作させた場合を示す上面図(平面図)である。
【図15】本発明の一実施形態によるジョイント機構の球頭パーツを45度方向に傾倒動作させた場合を示す正面図である。
【図16】比較例によるユニバーサルジョイント機構を示す斜視図および分解斜視図である。
【発明を実施するための形態】
【0022】
以下、本発明を具体化した実施形態を図面に基づいて説明する。
【0023】
図1および図2を参照して、本発明の一実施形態によるハプティックコントローラ100の構成について説明する。なお、ハプティックコントローラ100は、本発明の「ジョイント機構を備える操作部を有する装置」の一例である。
【0024】
本発明の一実施形態によるハプティックコントローラ100は、ユーザにより水平方向の回転操作または垂直方向(Z方向)から任意の角度で傾斜させる傾倒動作などの操作を行うことが可能な操作部101を有している。この操作部101は、ユーザが手動により回転操作または傾倒動作を行うことが可能なキャップ102と、キャップ102の裏面側(矢印Z1方向側)の中央部近傍に配置されたボス103と、ボス103の下方(矢印Z1方向)に配置されたスライダ104と、スライダ104の下方に配置されたセンサ部材105と、センサ部材105の裏面側の中央部近傍に配置されたジョイント機構1とを備えている。また、本実施形態では、ユーザにより操作部101のキャップ102が水平方向に回転操作されることまたは任意の方向に傾倒操作されることにより、ジョイント機構1が間接的に回転動作または傾倒動作されるように構成されている。
【0025】
また、ジョイント機構1の下方および側方には、LEDガイド106が配置されている。また、LEDガイド106の下方には、サブ基板107が配置されている。このサブ基板107の表面上には、複数のPI(フォトインタラプタ)108と、複数のLED109とが配置されている。また、サブ基板107上のPI108の上方には、PI108と対向するように、センサ部材105の裏面に形成されたリブ(図示せず)が配置されている。また、サブ基板107上のLED109の上方(矢印Z2方向)には、LED109と対向するように、LEDガイド106のガイド部110が配置されている。
【0026】
また、センサ部材105およびサブ基板107の側方には、ディスクホルダ111が配置されている。また、ディスクホルダ111の下方には、シャーシ112が配置されている。また、シャーシ112とサブ基板107との間には、モータホルダ113が配置されている。このモータホルダ113は、シャーシ112に形成された穴部に取り付けられている。また、モータホルダ113の下方には、モータ114が配置されている。
【0027】
また、モータ114の下方には、ナット115を介して、ロータ116が配置されている。また、ロータ116の下方には、コードホイールプレート117が配置されている。また、コードホイールプレート117の裏面には、ユーザによる操作部101の回転操作を検出するコードホイール(図示せず)が貼り付けられている。また、コードホイール(図示せず)の下方には、エンコーダ118が配置されたメイン基板119が配置されている。なお、コードホイール(図示せず)の裏面(エンコーダ118側の表面)には、放射状の複数の線状の検出部が設けられている。また、ユーザにより操作部101が回転操作されることによりコードホイールが回転した場合に、コードホイールの裏面に設けられた放射状の複数の線状の検出部の移動量(移動位置)がエンコーダ118により検出されることにより、ユーザによる操作部101の回転操作が検出されるように構成されている。
【0028】
また、ユーザにより操作部101のキャップ102が水平方向に回転操作された場合には、キャップ102に加えられた水平方向の回転力は、ボス103、スライダ104およびジョイント機構1を介して、コードホイールプレート117に伝達されるように構成されている。
【0029】
そして、コードホイールプレート117に伝達された回転力により、コードホイールプレート117とともにコードホイールが回転され、コードホイールの裏面に設けられた放射状の複数の線状の検出部の移動量(移動位置)がエンコーダ118により検出されることにより、ユーザにより操作部101のキャップ102を水平方向に回転操作されたことが検出されるように構成されている。また、エンコーダ118により検出された信号は、ケーブル(図示せず)を介して、モータ114に伝達されることにより、ユーザによる回転操作に対応する振動が発生するように構成されている。また、LED109は、ユーザの水平方向の回転操作に対応するように発光するように制御されている。
【0030】
また、ユーザにより操作部101のキャップ102が垂直状態から任意の方向に傾倒操作された場合には、キャップ102に加えられた外力は、ボス103、スライダ104、およびセンサ部材105を介してジョイント機構1に伝達されるように構成されている。また、ユーザにより操作部101が傾倒動作された場合には、センサ部材105の裏面に設けられたリブ(図示せず)がサブ基板107の表面に配置された複数のPI108のうちのいずれかに接近することにより、ユーザにより操作部101がどの方向に傾倒操作されたのかを検出することが可能である。また、検出された信号は、ケーブル(図示せず)を介して、モータ114に伝達されることにより、ユーザの傾倒操作に対応する振動を発生させるように構成されている。また、LED109は、ユーザの傾倒操作に対応するように発光するように制御されている。
【0031】
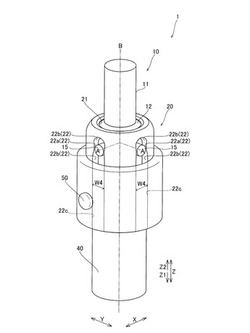
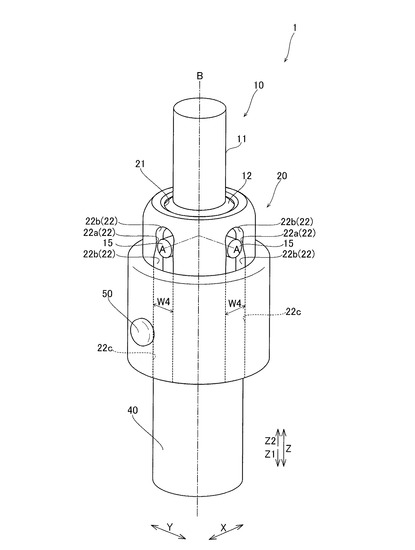
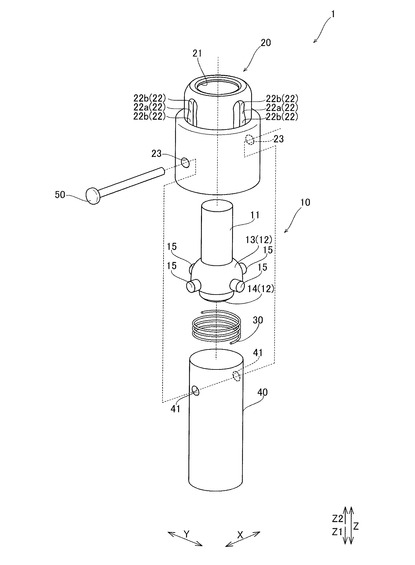
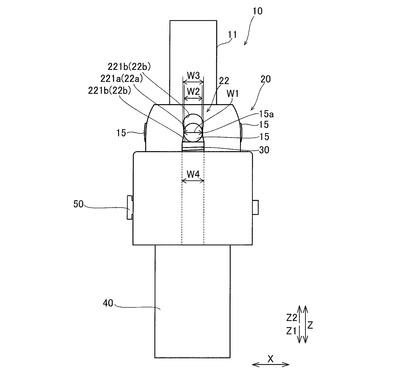
次に、図3〜図15を参照して、ジョイント機構1の詳細な構成について説明する。このジョイント機構1は、図3および図4に示すように、樹脂または金属などからなる球頭パーツ10と、球頭パーツ10を保持する樹脂または金属などからなる球頭保持パーツ20と、球頭パーツ10の下方に配置される圧縮コイルバネ30と、圧縮コイルバネ30の下方に配置される動力直結シャフト40と、球頭保持パーツ20および動力直結シャフト40に取り付けられる固定ピン50とを備えている。すなわち、本実施形態によるジョイント機構1は、5つの部品により構成されている。なお、球頭パーツ10は、本発明の「頭部材」の一例であり、球頭保持パーツ20は、本発明の「頭保持部材」の一例である。
【0032】
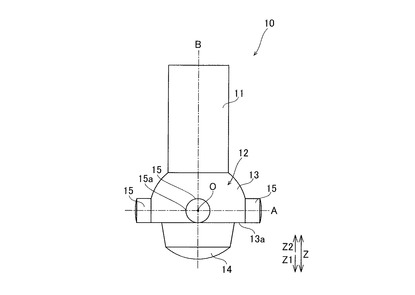
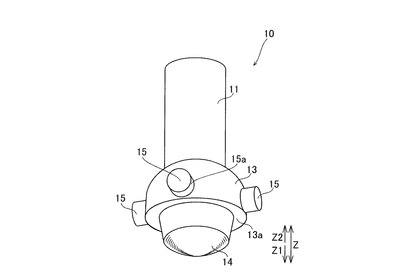
また、図4に示すように、球頭パーツ10は、軸部11と、軸部11の下方に配置された頭部12とを含んでいる。また、球頭パーツ10の軸部11には、ユーザによりハプティックコントローラ100のキャップ102が水平方向に回転操作された場合または傾倒操作された場合に、水平方向の回転操作に対応する回転力または傾倒操作に対応する外力がキャップ102から間接的に伝達されるように構成されている。
【0033】
また、頭部12は、球状の表面を有する第1球面部13と、第1球面部13の下方に配置された第2球面部14とを有している。
【0034】
また、球状の表面を有する第1球面部13には、第1球面部13の外側面から突出するように4つの突起部15が形成されている。また、4つの突起部15は、円柱形状を有している。ここで、本実施形態では、球頭パーツ10に水平方向の回転力が加えられた場合には、球頭パーツ10の突起部15と、後述する球頭保持パーツ20の突起係合部22とが水平方向の回転力を伝達可能に係合することにより、球頭保持パーツ20が水平方向に回転するように構成されている。
【0035】
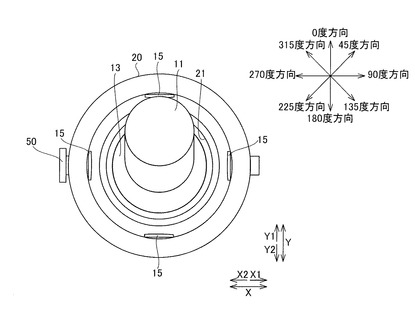
また、図5に示すように、球頭パーツ10の4つの突起部15の各々は、上面から見て(平面視において)、約90度の角度で等角度間隔に配置されている。また、図3に示すように、球頭パーツ10の突起部15の中心軸Aは、球頭パーツ10の中心軸B(Z方向)に対して垂直方向(X方向およびY方向)で、かつ、正面から見て頭部12の中心近傍(図8に示す中心O近傍)に配置されている。
【0036】
また、図7〜図9に示すように、第1球面部13の下方部分には、第1球面部13の下端部分を切り欠いて形成された平坦面部13aが形成されている。なお、平坦面部13aは、本発明の「取付部」の一例である。また、第1球面部13の平坦面部13aは、下方から見て(矢印Z1方向から見て)、リング形状を有している。
【0037】
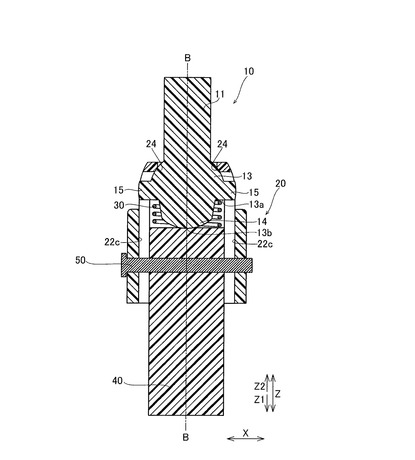
また、図7に示すように、圧縮コイルバネ30は、球頭パーツ10が略垂直に配置されるように球頭パーツ10を上方(矢印Z2方向)に付勢するように配置されている。具体的には、圧縮コイルバネ30の上端部分は、第1球面部13の平坦面部13aの表面(矢印Z1方向側の表面)に接触するように配置されている。また、圧縮コイルバネ30の下端部分は、動力直結シャフト40の上面(矢印Z2方向側の表面)に接触するように配置されている。これにより、球頭パーツ10に傾倒動作させる外力が加えられていない場合に、球頭パーツ10の中心軸Bが略垂直を維持する(Z方向に沿う)ように構成されている。また、第2球面部14の下端部13b(矢印Z1方向側の部分)は、動力直結シャフト40の上面(矢印Z2方向側の表面)と点接触するように配置されている。
【0038】
また、図3および図4に示すように、球頭保持パーツ20は、上面に球頭パーツ10の軸部11を外部に露出する穴部21と、球頭パーツ10の突起部15に対して球頭パーツ10に加えられる水平方向の回転力を伝達可能に係合する貫通した長穴である4つの突起係合部22と、固定ピン50を取り付ける2つの固定ピン取付用穴部23とを含んでいる。
【0039】
また、図7に示すように、球頭保持パーツ20は、球頭パーツ10の軸部11を傾倒動作させることが可能なように、内周面に保持部24を有している。この保持部24は、球頭パーツ10の第1球面部13の外周面の形状に対応する形状に形成されている。また、第1球面部13の外周面は、圧縮コイルバネ30の付勢力により保持部24に対して付勢されている。
【0040】
また、球頭保持パーツ20の4つの突起係合部22は、球頭保持パーツ20の外側面に約90度の等角度間隔で形成されている。また、図6に示すように、球頭保持パーツ20の突起係合部22は、球頭パーツ10の突起部15の水平方向の幅W1と略同じ幅W2を有するくびれ部22aと、くびれ部22aを上下方向から挟むように設けられるとともにくびれ部22aの幅W2よりも大きい幅W3を有する2つの幅広部22bとを含んでいる。
【0041】
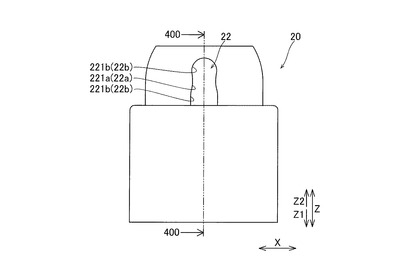
また、図10に示すように、突起係合部22は、正面から見て、くびれ部22aと幅広部22bとにより瓢箪形状を有するように形成されている。また、突起係合部22は、くびれ部22aから幅広部22bに沿って円弧形状を有している。
【0042】
また、図6に示すように、球頭パーツ10の軸部11に傾倒動作させる外力が加わっていない場合には、球頭パーツ10の突起部15は、球頭保持パーツ20の突起係合部22のくびれ部22a近傍に配置されるように構成されている。
【0043】
また、本実施形態では、球頭パーツ10に水平方向の回転力が加えられた場合には、球頭パーツ10の突起部15の水平方向の外表面部15aと、球頭保持パーツ20の突起係合部22のくびれ部22aの内表面部221aとが水平方向の回転力を伝達可能に線接触して係合することにより、球頭保持パーツ20が水平方向に回転するように構成されている。
【0044】
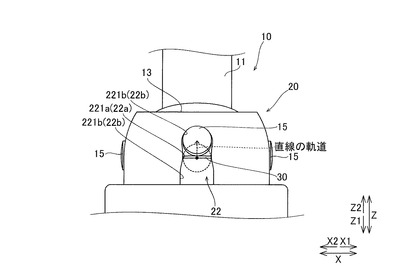
また、本実施形態では、図12に示すように、ジョイント機構1を傾倒動作させる場合には、ジョイント機構1を傾倒動作させる方向を上面から見て(平面視において)、矢印Y1方向を0度方向とし、矢印Y1方向と矢印X1方向との間の方向を45度方向とし、矢印X1方向を90度方向とし、矢印X1方向と矢印Y2方向との間の方向を135度方向とし、矢印Y2方向を180度方向とし、矢印Y2方向と矢印X2方向との間の方向を225度方向とし、矢印X2方向を270度方向とし、矢印X2方向と矢印Y1方向との間の方向を315度方向とする。そして、球頭パーツ10が垂直に配置された状態から0度方向(矢印Y1方向)に傾倒動作するように球頭パーツ10に外力が加えられた場合には、図13に示すように、球頭パーツ10の180度方向(矢印Y2方向)に形成された突起部15は、くびれ部22a近傍からくびれ部22aの上方に位置する幅広部22bに向けて直線の軌道を描きながら移動するように構成されている。なお、球頭パーツ10の0度方向(矢印Y1方向)に形成された突起部15は、くびれ部22a近傍からくびれ部22aの下方に位置する幅広部22bに向かって直線の軌道を描きながら移動するように構成されている。また、球頭パーツ10の90度方向(矢印X1方向)および270度方向(矢印X2方向)に形成された突起部15は、移動しないように構成されている。
【0045】
なお、球頭パーツ10が垂直に配置された状態から90度方向(矢印X1方向)、180度方向(矢印Y2方向)および270度方向(矢印X2方向)に傾倒動作するように球頭パーツ10に外力が加えられた場合にも、球頭パーツ10の突起部15は、上記と同様の動作を行うように構成されている。
【0046】
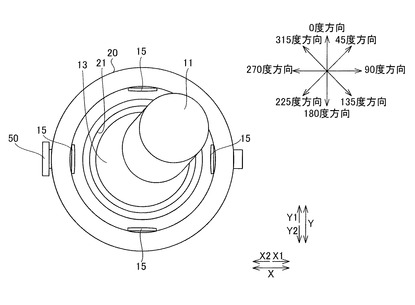
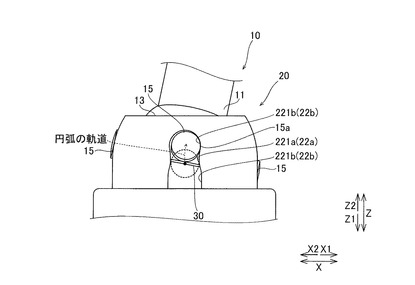
また、本実施形態では、図14に示すように、球頭パーツ10が垂直に配置された状態から平面視で最も大きく傾倒する方向(45度方向、135度方向、225度方向または315度方向)のうちの45度方向に傾倒動作するように球頭パーツ10に外力が加えられた場合には、図15に示すように、球頭パーツ10の180度方向に形成された突起部15の右端部分(矢印X1方向側)の外表面部15aは、くびれ部22a近傍からくびれ部22aの上方に位置する幅広部22bの右斜め上方に向かって、突起係合部22のくびれ部22aの内表面部221aおよび幅広部22bの内表面部221bと線接触した状態で円弧の軌道を描きながら移動するように構成されている。
【0047】
なお、球頭パーツ10の270度方向に形成された突起部15は、突起部15の左端部分(矢印Y1方向側)の外表面部15aがくびれ部22a近傍からくびれ部22aの上方に位置する幅広部22bの左斜め上方に向かって、突起係合部22のくびれ部22aの内表面部221aおよび幅広部22bの内表面部221bと線接触した状態で円弧の軌道を描きながら移動するように構成されている。
【0048】
また、球頭パーツ10の0度方向に形成された突起部15は、突起部15の右端部分(矢印X2方向側)の外表面部15aがくびれ部22a近傍からくびれ部22aの下方に位置する幅広部22bの右斜め下方に向かって、突起係合部22のくびれ部22aの内表面部221aおよび幅広部22bの内表面部221bと線接触しながら円弧の軌道を描きながら移動するように構成されている。
【0049】
また、球頭パーツ10の90度方向に形成された突起部15は、突起部15の左端部分(矢印Y2方向側)の外表面部15aがくびれ部22a近傍からくびれ部22aの下方に位置する幅広部22bの左斜め下方に向かって、突起係合部22のくびれ部22aの内表面部221aおよび幅広部22bの内表面部221bと線接触しながら円弧の軌道を描きながら移動するように構成されている。
【0050】
なお、球頭パーツ10が垂直に配置された状態から135度方向、225度方向および315度方向に傾倒動作するように球頭パーツ10に外力が加えられた場合も、球頭パーツ10の突起部15は、上記と同様の動作を行うように構成されている。
【0051】
また、図3、図6および図11に示すように、球頭保持パーツ20の突起係合部22には、突起係合部22の下方の幅広部22bの幅W3と略同じ幅W4で下方に延びるように4つの溝部22cが形成されている。また、突起係合部22の4つの溝部22cは、球頭保持パーツ20の内表面に約90度の角度で等角度間隔で形成されている。また、図3および図4に示すように、突起係合部22の4つの溝部22cの各々は、平面視において、球頭パーツ10の4つの突起部15の各々に対応する位置に形成されている。
【0052】
また、図4に示すように、固定ピン50は、球頭保持パーツ20の2つの固定ピン取付用穴部23および動力直結シャフト40の2つの固定ピン取付用穴部41を介して取り付けられている。これにより、球頭パーツ10および圧縮コイルバネ30は、球頭保持パーツ20と動力直結シャフト40との間で固定されている。
【0053】
次に、図4を参照して、ジョイント機構1の組立方法について説明する。
【0054】
まず、球頭保持パーツ20に、球頭パーツ10を下方から差し込む。この際、球頭パーツ10の突起部15が球頭保持パーツ20の溝部22cに沿って上方に差し込まれる。次に、球頭パーツ10の下部(第2球面部14)に、圧縮コイルバネ30を嵌め込む(当接させる)。さらに、圧縮コイルバネ30の下方から動力直結シャフト40を差し込む。最後に、球頭保持パーツ20に形成された固定ピン取付用穴部23および動力直結シャフト40に形成された固定ピン取付用穴部41に固定ピン50を差し込む。上記のような組立方法により、ジョイント機構1が組み立てられる。
【0055】
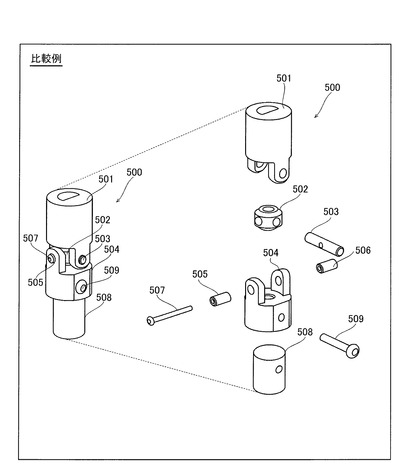
本実施形態では、上記のように、球頭パーツ10の頭部12に、突起部15を設け、球頭保持パーツ20に、球頭パーツ10の突起部15に対して球頭パーツ10に加えられる水平方向の回転力を伝達可能に係合する突起係合部22を設けることによって、球頭パーツ10の頭部12に水平方向の回転力が加えられた場合に、球頭パーツ10の頭部12に加えられた水平方向の回転力を球頭パーツ10の頭部12の突起部15を介して球頭保持パーツ20の突起係合部22に確実に伝達することができるので、球頭パーツ10に加えられた水平方向の回転力により球頭保持パーツ20を水平方向に回転させることができる。ここで、図16を参照して、本実施形態によるジョイント機構1の比較例として、ユニバーサルジョイント機構500の構成について説明する。図16に示すように、比較例によるユニバーサルジョイント機構500は、頭パーツ501と、シャフト保持部材502と、シャフト503と、頭支持パーツ504と、スペーサ505と、スペーサ506と、シャフト507と、動力直結シャフト508と、固定ピン509とを備えている。すなわち、比較例によるユニバーサルジョイント機構500は、9つの部材により構成されている。これに対して、本実施形態では、上記のように、5つの部品によりジョイント機構1を構成することができるので、9つの部品から構成される比較例によるユニバーサルジョイント機構500と比べて、本実施形態によるジョイント機構1の部品点数の増加を抑制することができる。また、部品点数が少ないことにより、本実施形態によるジョイント機構1の組立作業性を、比較例によるユニバーサルジョイント機構500の組立作業性と比べて向上させることができる。
【0056】
また、本実施形態では、上記のように、球頭パーツ10に水平方向の回転力が加えられた場合に、球頭パーツ10の突起部15と球頭保持パーツ20の突起係合部22のくびれ部22aとが水平方向の回転力を伝達可能に係合することにより、球頭パーツ10が水平方向に回転することによって、球頭保持パーツ20の突起係合部22のくびれ部22aの幅W2が球頭パーツ10の頭部12の突起部15の幅W1よりも大きい場合と異なり、球頭パーツ10に水平方向の回転力が加えられた場合に、突起部15とくびれ部22aとの間のがたつきを小さくすることができるので、回転量を精度よく調整することができる。
【0057】
また、本実施形態では、上記のように、球頭パーツ10が垂直に配置された状態から球頭パーツ10が平面視で最も大きく傾倒する45度方向(135度方向、225度方向、315度方向)に傾倒動作するように球頭パーツ10に外力が加えられた場合に、突起部15が突起係合部22のくびれ部22aの内表面部221aおよび幅広部22bの内表面部221bに沿って移動することによって、くびれ部22aにより水平方向の回転力を伝達しながら、幅広部22bにより容易に球頭パーツ10が最も大きく傾倒する45度方向(135度方向、225度方向、315度方向)に傾倒動作させることができる。
【0058】
また、本実施形態では、上記のように、球頭パーツ10が垂直に配置された状態から球頭パーツ10が平面視で最も大きく傾倒する方向に傾倒動作するように球頭パーツ10に外力が加えられた場合に、円柱形状の突起部15の外表面部15aが突起係合部22のくびれ部22aから幅広部22bに沿った円弧形状の内表面部221aおよび221bに沿って移動することによって、たとえば、突起部15が三角柱形状や四角柱形状に形成される場合と異なり、円柱形状の突起部15を円弧形状を有する突起係合部22のくびれ部22aの内表面部221aおよび幅広部22bの内表面部221bに沿ってより滑らかに(安定して)移動させることができる。
【0059】
また、本実施形態では、上記のように、突起係合部22を、くびれ部22aとくびれ部22aを挟むように設けられた幅広部22bとにより瓢箪形状を有するように形成することによって、突起係合部22の形状を瓢箪形状にすることにより、容易に、くびれ部22aとくびれ部22aを挟むように設けられた幅広部22bとを有する突起係合部22を構成することができる。
【0060】
また、本実施形態では、上記のように、瓢箪形状の突起係合部22を、くびれ部22aと幅広部22bとを含む長穴にすることによって、球頭パーツ10が垂直に配置された状態から球頭パーツ10が平面視で最も大きく傾倒する45度方向(135度方向、225度方向、315度方向)に傾倒動作するように球頭パーツ10に外力が加えられた場合に、容易に、突起部15を突起係合部22のくびれ部22aと幅広部22bとを含む長穴の内表面部221a(221b)に沿って滑らかに(安定して)移動させることができる。
【0061】
また、本実施形態では、上記のように、頭部12の下方部分に形成された平坦面部13aに圧縮コイルバネ30を取り付けることにより、球頭パーツ10に傾倒動作させる外力が加えられていない場合に、球頭パーツ10の中心軸Bが略垂直を維持することによって、球頭パーツ10に傾倒動作させる外力が加えられていない状態で、球頭パーツ10を中心軸Bが略垂直になるように維持することができる。また、球頭パーツ10に加えられた傾倒動作させる外力が解除された際に、自動的に球頭パーツ10の中心軸Bを略垂直の位置に戻す(復帰させる)ことができる。
【0062】
また、本実施形態では、上記のように、突起部15の中心軸Aを、球頭パーツ10の中心軸Bに対して垂直方向で、かつ、頭部12の中心近傍Oに配置することによって、突起部15の中心軸Aが球頭パーツ10の中心軸Bに対して垂直方向(Z方向)以外の方向で、かつ、頭部12の中心O近傍以外の部分に配置される場合と異なり、頭部12に水平方向の回転力が加えられた場合に、確実に、水平方向の回転力を球頭保持パーツ20に伝達することができる。
【0063】
また、本実施形態では、上記のように、球頭保持パーツ20の突起係合部22に、幅広部22bの幅W3と略同じ幅W4で下方に延びるように形成された溝部22cを設けることによって、球頭パーツ10を球頭保持パーツ20に組み付ける際に、容易に、球頭パーツ10の突起部15を球頭保持パーツ20の突起係合部22の溝部22cを介して突起係合部22に組み付けることができる。
【0064】
なお、今回開示された実施形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施形態の説明ではなく特許請求の範囲によって示され、さらに特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれる。
【0065】
たとえば、上記実施形態では、本発明のジョイント機構を備える操作部を有する装置の一例としてハプティックコントローラを示したが、本発明はこれに限られない。本発明では、ジョイント機構を備える操作部をハプティックコントローラ以外の装置(電子機器等)にも適用することが可能である。具体的には、ジョイント機構を携帯電話やPDA(Personal Digital Assistant)などの携帯機器の傾倒と水平方向の回転とを両立させる操作部などにも適用可能である。このように、ジョイント機構をさまざまな装置(電子機器等)に応用することが可能となるので、応用範囲が広がることにより、製品価値を高めることが可能となる。
【0066】
また、上記実施形態では、本発明の突起係合部の一例として、くびれ部および幅広部を含む瓢箪形状の貫通した長穴を示したが、本発明はこれに限られない。本発明では、球頭パーツに加えられる水平方向の回転力を突起係合部に伝達することが可能であれば、くびれ部および幅広部を含む瓢箪形状の貫通した長穴以外の突起係合部でもよい。たとえば、突起係合部を溝部により形成してもよい。
【0067】
また、上記実施形態では、球頭パーツに4つの突起部を形成する例を示したが、本発明はこれに限られない。たとえば、球頭パーツに1つ以上3つ以下または5つ以上の突起部を形成してもよい。
【0068】
また、上記実施形態では、球頭パーツが略垂直に配置されるように球頭パーツを付勢する付勢部材の一例として圧縮コイルバネを適用する例を示したが、本発明はこれに限られない。たとえば、球頭パーツが略垂直に配置されるように球頭パーツを付勢することが可能であれば、圧縮コイルバネ以外にゴムなどの弾性体からなる付勢部材を用いてもよいし、球頭パーツの底部または動力直結シャフトに付勢構造を一体的に設ける構成でもよい。
【符号の説明】
【0069】
1 ジョイント機構
10 球頭パーツ(頭部材)
12 頭部
13a 平坦面部(取付部)
15 突起部
20 球頭保持パーツ(頭保持部材)
22 突起係合部
22a くびれ部
22b 幅広部
30 圧縮コイルバネ(付勢部材)
101 操作部
【技術分野】
【0001】
この発明は、ジョイント機構およびジョイント機構を備える操作部を有する装置に関し、特に、頭部材と頭部材を保持する頭保持部材とを備える、ジョイント機構およびジョイント機構を備える操作部を有する装置に関する。
【背景技術】
【0002】
従来、頭部材と頭部材を保持する頭保持部材とを備えるジョイント機構およびジョイント機構を備える操作部を有する装置が知られている(たとえば、特許文献1参照)。
【0003】
上記特許文献1には、外周面に沿って90度の角度間隔で4つの突起が形成された球頭(頭部材)と、球頭を回転可能に保持する球面軸受が形成されたキャッチパーツ(頭保持部材)とを備えるボールジョイント(ジョイント機構)が開示されている。このボールジョイントのキャッチパーツの球面軸受の外縁部には、外縁部に沿って90度の角度間隔で4つの凹形状の溝部が形成されている。この4つの凹形状の溝部の各々には、球頭の外周面に形成された4つの突起の各々が係合するように構成されている。また、球頭には、ユーザにより手動で水平方向に回転操作することが可能な連結軸が設けられている。そして、球頭が球面軸受に取り付けられた状態において、ユーザにより球頭に設けられた連結軸が水平方向に回転操作されることにより、球頭に形成された4つの突起の各々が球面軸受の4つの凹形状の溝部の各々から外れて球頭が回転するように構成されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平11−101221号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1に記載のボールジョイントでは、ユーザにより球頭に設けられた連結軸が水平方向に回転操作された場合には、球頭に形成された4つの突起の各々が球面軸受の4つの凹形状の溝部の各々から外れてしまうため、球頭に加えられた水平方向の回転力を球面軸受に伝達することができないという不都合がある。このため、キャッチパーツを水平方向に回転させることが困難であるという問題点がある。
【0006】
この発明は、上記のような課題を解決するためになされたものであり、この発明の1つの目的は、頭部材に加えられた水平方向の回転力により頭保持部材を水平方向に回転させることが可能なジョイント機構およびジョイント機構を備える操作部を有する装置を提供することである。
【課題を解決するための手段】
【0007】
この発明の第1の局面によるジョイント機構は、少なくとも一部に球状の表面を有する頭部を含む頭部材と、頭部材を傾倒動作させることが可能なように頭部材の球状の表面を保持する頭保持部材とを備え、頭部材の頭部には、突起部が設けられ、頭保持部材には、頭部材の突起部に対して頭部材に加えられる水平方向の回転力を伝達可能に係合する突起係合部が設けられている。
【0008】
この第1の局面によるジョイント機構では、上記のように、頭部材の頭部に、突起部を設け、頭保持部材に、頭部材の突起部に対して頭部材に加えられる水平方向の回転力を伝達可能に係合する突起係合部を設けることによって、頭部材の頭部に水平方向の回転力が加えられた場合に、頭部材の頭部に加えられた水平方向の回転力を頭部材の頭部の突起部を介して頭保持部材の突起係合部に確実に伝達することができるので、頭部材に加えられた水平方向の回転力により頭保持部材を水平方向に回転させることができる。また、頭部材と頭保持部材とによりジョイント機構を構成することができるので、比較的部品点数が多いユニバーサルジョイント機構などに比べて、部品点数の増加を抑制することができる。また、部品点数が少ないことにより、ジョイント機構の組立作業性を向上させることができる。
【0009】
上記第1の局面によるジョイント機構において、好ましくは、頭保持部材の突起係合部は、頭部材の突起部の幅と略同じ幅を有するくびれ部を含み、頭部材に水平方向の回転力が加えられた場合に、頭部材の突起部と頭保持部材の突起係合部のくびれ部とが水平方向の回転力を伝達可能に係合することにより、頭部材が水平方向に回転するように構成されている。このように構成すれば、頭保持部材の突起係合部のくびれ部の幅が頭部材の頭部の突起部の幅よりも大きい場合と異なり、頭部材に水平方向の回転力が加えられた場合に、突起部とくびれ部との間のがたつきを小さくすることができるので、回転量を精度よく調整することができる。
【0010】
この場合、好ましくは、頭保持部材の突起係合部は、くびれ部を挟むように設けられ、くびれ部の幅よりも大きい幅を有する幅広部をさらに含み、頭部材が垂直に配置された状態から頭部材が平面視で最も大きく傾倒する方向に傾倒動作するように頭部材に外力が加えられた場合に、突起部は、突起係合部のくびれ部および幅広部の内表面部に沿って移動するように構成されている。このように構成すれば、くびれ部により水平方向の回転力を伝達しながら、幅広部により容易に頭部材が最も大きく傾倒する方向に傾倒動作させることができる。
【0011】
上記くびれ部および幅広部を含む突起係合部を備えるジョイント機構において、好ましくは、突起部は、円柱形状を有し、突起係合部は、くびれ部から幅広部に沿って円弧形状を有し、頭部材が垂直に配置された状態から頭部材が平面視で最も大きく傾倒する方向に傾倒動作するように頭部材に外力が加えられた場合に、円柱形状の突起部の外表面部は、突起係合部のくびれ部から幅広部に沿った円弧形状の内表面部に沿って移動するように構成されている。このように構成すれば、たとえば、突起部が三角柱形状や四角柱形状に形成される場合と異なり、円柱形状の突起部を円弧形状を有する突起係合部のくびれ部および幅広部の内表面部に沿ってより滑らかに(安定して)移動させることができる。
【0012】
上記くびれ部および幅広部を含む突起係合部を備えるジョイント機構において、好ましくは、突起係合部は、くびれ部とくびれ部を挟むように設けられた幅広部とにより瓢箪形状を有するように形成されている。このように構成すれば、突起係合部の形状を瓢箪形状にすることにより、容易に、くびれ部とくびれ部を挟むように設けられた幅広部とを有する突起係合部を構成することができる。
【0013】
上記瓢箪形状を有する突起係合部を備えるジョイント機構において、好ましくは、瓢箪形状の突起係合部は、くびれ部と幅広部とを含む長穴である。このように構成すれば、頭部材が垂直に配置された状態から頭部材が平面視で最も大きく傾倒する方向に傾倒動作するように頭部材に外力が加えられた場合に、容易に、突起部を突起係合部のくびれ部と幅広部とを含む長穴の内表面部に沿って滑らかに(安定して)移動させることができる。
【0014】
上記第1の局面によるジョイント機構において、好ましくは、頭部材が略垂直に配置されるように頭部材を付勢する付勢部材をさらに備え、頭部の下方部分には、付勢部材が取り付けられる取付部が形成されており、頭部の下方部分に形成された取付部に弾性部材が取り付けられることにより、頭部材に傾倒動作させる外力が加えられていない場合に、頭部材の中心軸が略垂直を維持するように構成されている。このように構成すれば、頭部材に傾倒動作させる外力が加えられていない状態で、頭部材を中心軸が略垂直になるように維持することができる。また、頭部材に加えられた傾倒動作させる外力が解除された際に、自動的に頭部材の中心軸を略垂直の位置に戻す(復帰させる)ことができる。
【0015】
この場合、好ましくは、取付部は、頭部の下方部分の一部を切り欠いて形成された平坦面部を含み、付勢部材は、平坦面部に取り付けられる圧縮コイルバネを含む。このように構成すれば、頭部材に傾倒動作させる外力が加えられていない場合に、圧縮コイルバネにより、容易に、頭部材の垂直位置の維持および垂直位置への自動復帰を行うことができる。
【0016】
上記第1の局面によるジョイント機構において、好ましくは、突起部の中心軸は、頭部材の中心軸に対して垂直方向で、かつ、頭部の中心近傍に配置されている。このように構成すれば、突起部の中心軸が頭部材の中心軸に対して垂直方向以外の方向で、かつ、頭部の中心近傍以外の部分に配置される場合と異なり、頭部に水平方向の回転力が加えられた場合に、確実に、水平方向の回転力を頭保持部材に伝達することができる。
【0017】
上記第1の局面によるジョイント機構において、好ましくは、頭保持部材の突起係合部は、頭部材の突起部の幅と略同じ幅を有するくびれ部と、くびれ部を挟むように設けられ、くびれ部の幅よりも大きい幅を有する幅広部とを含み、頭保持部材の突起係合部は、幅広部の幅と略同じ幅で下方に延びるように形成された溝部をさらに含む。このように構成すれば、頭部材を頭保持部材に組み付ける際に、容易に、頭部材の突起部を頭保持部材の突起係合部の溝部を介して突起係合部に組み付けることができる。
【0018】
この発明の第2の局面によるジョイント機構を備える操作部を有する装置は、操作部に内蔵され、少なくとも一部に球状の表面を有する頭部を含む頭部材と、頭部材を傾倒動作させることが可能なように頭部材の球状の表面を保持する頭保持部材とを含むジョイント機構を備え、頭部材の頭部には、突起部が設けられ、頭保持部材には、頭部材の突起部に対して頭部材に加えられる水平方向の回転力を伝達可能に係合する突起係合部が設けられている。
【0019】
この第2の局面によるジョイント機構を備える操作部を有する装置では、上記のように、頭部材の頭部に、突起部を設け、頭保持部材に、頭部材の突起部に対して頭部材に加えられる水平方向の回転力を伝達可能に係合する突起係合部を設けることによって、頭部材の頭部に水平方向の回転力が加えられた場合に、頭部材の頭部に加えられた水平方向の回転力を頭部材の頭部の突起部を介して頭保持部材の突起係合部に確実に伝達することができるので、頭部材に加えられた水平方向の回転力により頭保持部材を水平方向に回転させることができる。
【発明の効果】
【0020】
本発明によれば、上記のように、頭部材に加えられた水平方向の回転力により頭保持部材を水平方向に回転させることができる。
【図面の簡単な説明】
【0021】
【図1】本発明の一実施形態によるハプティックコントローラの全体斜視図である。
【図2】図1の200−200線に沿った断面斜視図である。
【図3】本発明の一実施形態によるジョイント機構の全体斜視図である。
【図4】本発明の一実施形態によるジョイント機構の分解斜視図である。
【図5】本発明の一実施形態によるジョイント機構の上面図(平面図)である。
【図6】本発明の一実施形態によるジョイント機構の正面図である。
【図7】図5の300−300線に沿った断面図である。
【図8】本発明の一実施形態によるジョイント機構の球頭パーツの正面図である。
【図9】本発明の一実施形態によるジョイント機構の球頭パーツを斜め下方から見た斜視図である。
【図10】本発明の一実施形態によるジョイント機構の球頭保持パーツの正面図である。
【図11】図10の400−400線に沿った断面図である。
【図12】本発明の一実施形態によるジョイント機構の球頭パーツを0度方向に傾倒動作させた場合を示す上面図(平面図)である。
【図13】本発明の一実施形態によるジョイント機構の球頭パーツを0度方向に傾倒動作させた場合を示す正面図である。
【図14】本発明の一実施形態によるジョイント機構の球頭パーツを45度方向に傾倒動作させた場合を示す上面図(平面図)である。
【図15】本発明の一実施形態によるジョイント機構の球頭パーツを45度方向に傾倒動作させた場合を示す正面図である。
【図16】比較例によるユニバーサルジョイント機構を示す斜視図および分解斜視図である。
【発明を実施するための形態】
【0022】
以下、本発明を具体化した実施形態を図面に基づいて説明する。
【0023】
図1および図2を参照して、本発明の一実施形態によるハプティックコントローラ100の構成について説明する。なお、ハプティックコントローラ100は、本発明の「ジョイント機構を備える操作部を有する装置」の一例である。
【0024】
本発明の一実施形態によるハプティックコントローラ100は、ユーザにより水平方向の回転操作または垂直方向(Z方向)から任意の角度で傾斜させる傾倒動作などの操作を行うことが可能な操作部101を有している。この操作部101は、ユーザが手動により回転操作または傾倒動作を行うことが可能なキャップ102と、キャップ102の裏面側(矢印Z1方向側)の中央部近傍に配置されたボス103と、ボス103の下方(矢印Z1方向)に配置されたスライダ104と、スライダ104の下方に配置されたセンサ部材105と、センサ部材105の裏面側の中央部近傍に配置されたジョイント機構1とを備えている。また、本実施形態では、ユーザにより操作部101のキャップ102が水平方向に回転操作されることまたは任意の方向に傾倒操作されることにより、ジョイント機構1が間接的に回転動作または傾倒動作されるように構成されている。
【0025】
また、ジョイント機構1の下方および側方には、LEDガイド106が配置されている。また、LEDガイド106の下方には、サブ基板107が配置されている。このサブ基板107の表面上には、複数のPI(フォトインタラプタ)108と、複数のLED109とが配置されている。また、サブ基板107上のPI108の上方には、PI108と対向するように、センサ部材105の裏面に形成されたリブ(図示せず)が配置されている。また、サブ基板107上のLED109の上方(矢印Z2方向)には、LED109と対向するように、LEDガイド106のガイド部110が配置されている。
【0026】
また、センサ部材105およびサブ基板107の側方には、ディスクホルダ111が配置されている。また、ディスクホルダ111の下方には、シャーシ112が配置されている。また、シャーシ112とサブ基板107との間には、モータホルダ113が配置されている。このモータホルダ113は、シャーシ112に形成された穴部に取り付けられている。また、モータホルダ113の下方には、モータ114が配置されている。
【0027】
また、モータ114の下方には、ナット115を介して、ロータ116が配置されている。また、ロータ116の下方には、コードホイールプレート117が配置されている。また、コードホイールプレート117の裏面には、ユーザによる操作部101の回転操作を検出するコードホイール(図示せず)が貼り付けられている。また、コードホイール(図示せず)の下方には、エンコーダ118が配置されたメイン基板119が配置されている。なお、コードホイール(図示せず)の裏面(エンコーダ118側の表面)には、放射状の複数の線状の検出部が設けられている。また、ユーザにより操作部101が回転操作されることによりコードホイールが回転した場合に、コードホイールの裏面に設けられた放射状の複数の線状の検出部の移動量(移動位置)がエンコーダ118により検出されることにより、ユーザによる操作部101の回転操作が検出されるように構成されている。
【0028】
また、ユーザにより操作部101のキャップ102が水平方向に回転操作された場合には、キャップ102に加えられた水平方向の回転力は、ボス103、スライダ104およびジョイント機構1を介して、コードホイールプレート117に伝達されるように構成されている。
【0029】
そして、コードホイールプレート117に伝達された回転力により、コードホイールプレート117とともにコードホイールが回転され、コードホイールの裏面に設けられた放射状の複数の線状の検出部の移動量(移動位置)がエンコーダ118により検出されることにより、ユーザにより操作部101のキャップ102を水平方向に回転操作されたことが検出されるように構成されている。また、エンコーダ118により検出された信号は、ケーブル(図示せず)を介して、モータ114に伝達されることにより、ユーザによる回転操作に対応する振動が発生するように構成されている。また、LED109は、ユーザの水平方向の回転操作に対応するように発光するように制御されている。
【0030】
また、ユーザにより操作部101のキャップ102が垂直状態から任意の方向に傾倒操作された場合には、キャップ102に加えられた外力は、ボス103、スライダ104、およびセンサ部材105を介してジョイント機構1に伝達されるように構成されている。また、ユーザにより操作部101が傾倒動作された場合には、センサ部材105の裏面に設けられたリブ(図示せず)がサブ基板107の表面に配置された複数のPI108のうちのいずれかに接近することにより、ユーザにより操作部101がどの方向に傾倒操作されたのかを検出することが可能である。また、検出された信号は、ケーブル(図示せず)を介して、モータ114に伝達されることにより、ユーザの傾倒操作に対応する振動を発生させるように構成されている。また、LED109は、ユーザの傾倒操作に対応するように発光するように制御されている。
【0031】
次に、図3〜図15を参照して、ジョイント機構1の詳細な構成について説明する。このジョイント機構1は、図3および図4に示すように、樹脂または金属などからなる球頭パーツ10と、球頭パーツ10を保持する樹脂または金属などからなる球頭保持パーツ20と、球頭パーツ10の下方に配置される圧縮コイルバネ30と、圧縮コイルバネ30の下方に配置される動力直結シャフト40と、球頭保持パーツ20および動力直結シャフト40に取り付けられる固定ピン50とを備えている。すなわち、本実施形態によるジョイント機構1は、5つの部品により構成されている。なお、球頭パーツ10は、本発明の「頭部材」の一例であり、球頭保持パーツ20は、本発明の「頭保持部材」の一例である。
【0032】
また、図4に示すように、球頭パーツ10は、軸部11と、軸部11の下方に配置された頭部12とを含んでいる。また、球頭パーツ10の軸部11には、ユーザによりハプティックコントローラ100のキャップ102が水平方向に回転操作された場合または傾倒操作された場合に、水平方向の回転操作に対応する回転力または傾倒操作に対応する外力がキャップ102から間接的に伝達されるように構成されている。
【0033】
また、頭部12は、球状の表面を有する第1球面部13と、第1球面部13の下方に配置された第2球面部14とを有している。
【0034】
また、球状の表面を有する第1球面部13には、第1球面部13の外側面から突出するように4つの突起部15が形成されている。また、4つの突起部15は、円柱形状を有している。ここで、本実施形態では、球頭パーツ10に水平方向の回転力が加えられた場合には、球頭パーツ10の突起部15と、後述する球頭保持パーツ20の突起係合部22とが水平方向の回転力を伝達可能に係合することにより、球頭保持パーツ20が水平方向に回転するように構成されている。
【0035】
また、図5に示すように、球頭パーツ10の4つの突起部15の各々は、上面から見て(平面視において)、約90度の角度で等角度間隔に配置されている。また、図3に示すように、球頭パーツ10の突起部15の中心軸Aは、球頭パーツ10の中心軸B(Z方向)に対して垂直方向(X方向およびY方向)で、かつ、正面から見て頭部12の中心近傍(図8に示す中心O近傍)に配置されている。
【0036】
また、図7〜図9に示すように、第1球面部13の下方部分には、第1球面部13の下端部分を切り欠いて形成された平坦面部13aが形成されている。なお、平坦面部13aは、本発明の「取付部」の一例である。また、第1球面部13の平坦面部13aは、下方から見て(矢印Z1方向から見て)、リング形状を有している。
【0037】
また、図7に示すように、圧縮コイルバネ30は、球頭パーツ10が略垂直に配置されるように球頭パーツ10を上方(矢印Z2方向)に付勢するように配置されている。具体的には、圧縮コイルバネ30の上端部分は、第1球面部13の平坦面部13aの表面(矢印Z1方向側の表面)に接触するように配置されている。また、圧縮コイルバネ30の下端部分は、動力直結シャフト40の上面(矢印Z2方向側の表面)に接触するように配置されている。これにより、球頭パーツ10に傾倒動作させる外力が加えられていない場合に、球頭パーツ10の中心軸Bが略垂直を維持する(Z方向に沿う)ように構成されている。また、第2球面部14の下端部13b(矢印Z1方向側の部分)は、動力直結シャフト40の上面(矢印Z2方向側の表面)と点接触するように配置されている。
【0038】
また、図3および図4に示すように、球頭保持パーツ20は、上面に球頭パーツ10の軸部11を外部に露出する穴部21と、球頭パーツ10の突起部15に対して球頭パーツ10に加えられる水平方向の回転力を伝達可能に係合する貫通した長穴である4つの突起係合部22と、固定ピン50を取り付ける2つの固定ピン取付用穴部23とを含んでいる。
【0039】
また、図7に示すように、球頭保持パーツ20は、球頭パーツ10の軸部11を傾倒動作させることが可能なように、内周面に保持部24を有している。この保持部24は、球頭パーツ10の第1球面部13の外周面の形状に対応する形状に形成されている。また、第1球面部13の外周面は、圧縮コイルバネ30の付勢力により保持部24に対して付勢されている。
【0040】
また、球頭保持パーツ20の4つの突起係合部22は、球頭保持パーツ20の外側面に約90度の等角度間隔で形成されている。また、図6に示すように、球頭保持パーツ20の突起係合部22は、球頭パーツ10の突起部15の水平方向の幅W1と略同じ幅W2を有するくびれ部22aと、くびれ部22aを上下方向から挟むように設けられるとともにくびれ部22aの幅W2よりも大きい幅W3を有する2つの幅広部22bとを含んでいる。
【0041】
また、図10に示すように、突起係合部22は、正面から見て、くびれ部22aと幅広部22bとにより瓢箪形状を有するように形成されている。また、突起係合部22は、くびれ部22aから幅広部22bに沿って円弧形状を有している。
【0042】
また、図6に示すように、球頭パーツ10の軸部11に傾倒動作させる外力が加わっていない場合には、球頭パーツ10の突起部15は、球頭保持パーツ20の突起係合部22のくびれ部22a近傍に配置されるように構成されている。
【0043】
また、本実施形態では、球頭パーツ10に水平方向の回転力が加えられた場合には、球頭パーツ10の突起部15の水平方向の外表面部15aと、球頭保持パーツ20の突起係合部22のくびれ部22aの内表面部221aとが水平方向の回転力を伝達可能に線接触して係合することにより、球頭保持パーツ20が水平方向に回転するように構成されている。
【0044】
また、本実施形態では、図12に示すように、ジョイント機構1を傾倒動作させる場合には、ジョイント機構1を傾倒動作させる方向を上面から見て(平面視において)、矢印Y1方向を0度方向とし、矢印Y1方向と矢印X1方向との間の方向を45度方向とし、矢印X1方向を90度方向とし、矢印X1方向と矢印Y2方向との間の方向を135度方向とし、矢印Y2方向を180度方向とし、矢印Y2方向と矢印X2方向との間の方向を225度方向とし、矢印X2方向を270度方向とし、矢印X2方向と矢印Y1方向との間の方向を315度方向とする。そして、球頭パーツ10が垂直に配置された状態から0度方向(矢印Y1方向)に傾倒動作するように球頭パーツ10に外力が加えられた場合には、図13に示すように、球頭パーツ10の180度方向(矢印Y2方向)に形成された突起部15は、くびれ部22a近傍からくびれ部22aの上方に位置する幅広部22bに向けて直線の軌道を描きながら移動するように構成されている。なお、球頭パーツ10の0度方向(矢印Y1方向)に形成された突起部15は、くびれ部22a近傍からくびれ部22aの下方に位置する幅広部22bに向かって直線の軌道を描きながら移動するように構成されている。また、球頭パーツ10の90度方向(矢印X1方向)および270度方向(矢印X2方向)に形成された突起部15は、移動しないように構成されている。
【0045】
なお、球頭パーツ10が垂直に配置された状態から90度方向(矢印X1方向)、180度方向(矢印Y2方向)および270度方向(矢印X2方向)に傾倒動作するように球頭パーツ10に外力が加えられた場合にも、球頭パーツ10の突起部15は、上記と同様の動作を行うように構成されている。
【0046】
また、本実施形態では、図14に示すように、球頭パーツ10が垂直に配置された状態から平面視で最も大きく傾倒する方向(45度方向、135度方向、225度方向または315度方向)のうちの45度方向に傾倒動作するように球頭パーツ10に外力が加えられた場合には、図15に示すように、球頭パーツ10の180度方向に形成された突起部15の右端部分(矢印X1方向側)の外表面部15aは、くびれ部22a近傍からくびれ部22aの上方に位置する幅広部22bの右斜め上方に向かって、突起係合部22のくびれ部22aの内表面部221aおよび幅広部22bの内表面部221bと線接触した状態で円弧の軌道を描きながら移動するように構成されている。
【0047】
なお、球頭パーツ10の270度方向に形成された突起部15は、突起部15の左端部分(矢印Y1方向側)の外表面部15aがくびれ部22a近傍からくびれ部22aの上方に位置する幅広部22bの左斜め上方に向かって、突起係合部22のくびれ部22aの内表面部221aおよび幅広部22bの内表面部221bと線接触した状態で円弧の軌道を描きながら移動するように構成されている。
【0048】
また、球頭パーツ10の0度方向に形成された突起部15は、突起部15の右端部分(矢印X2方向側)の外表面部15aがくびれ部22a近傍からくびれ部22aの下方に位置する幅広部22bの右斜め下方に向かって、突起係合部22のくびれ部22aの内表面部221aおよび幅広部22bの内表面部221bと線接触しながら円弧の軌道を描きながら移動するように構成されている。
【0049】
また、球頭パーツ10の90度方向に形成された突起部15は、突起部15の左端部分(矢印Y2方向側)の外表面部15aがくびれ部22a近傍からくびれ部22aの下方に位置する幅広部22bの左斜め下方に向かって、突起係合部22のくびれ部22aの内表面部221aおよび幅広部22bの内表面部221bと線接触しながら円弧の軌道を描きながら移動するように構成されている。
【0050】
なお、球頭パーツ10が垂直に配置された状態から135度方向、225度方向および315度方向に傾倒動作するように球頭パーツ10に外力が加えられた場合も、球頭パーツ10の突起部15は、上記と同様の動作を行うように構成されている。
【0051】
また、図3、図6および図11に示すように、球頭保持パーツ20の突起係合部22には、突起係合部22の下方の幅広部22bの幅W3と略同じ幅W4で下方に延びるように4つの溝部22cが形成されている。また、突起係合部22の4つの溝部22cは、球頭保持パーツ20の内表面に約90度の角度で等角度間隔で形成されている。また、図3および図4に示すように、突起係合部22の4つの溝部22cの各々は、平面視において、球頭パーツ10の4つの突起部15の各々に対応する位置に形成されている。
【0052】
また、図4に示すように、固定ピン50は、球頭保持パーツ20の2つの固定ピン取付用穴部23および動力直結シャフト40の2つの固定ピン取付用穴部41を介して取り付けられている。これにより、球頭パーツ10および圧縮コイルバネ30は、球頭保持パーツ20と動力直結シャフト40との間で固定されている。
【0053】
次に、図4を参照して、ジョイント機構1の組立方法について説明する。
【0054】
まず、球頭保持パーツ20に、球頭パーツ10を下方から差し込む。この際、球頭パーツ10の突起部15が球頭保持パーツ20の溝部22cに沿って上方に差し込まれる。次に、球頭パーツ10の下部(第2球面部14)に、圧縮コイルバネ30を嵌め込む(当接させる)。さらに、圧縮コイルバネ30の下方から動力直結シャフト40を差し込む。最後に、球頭保持パーツ20に形成された固定ピン取付用穴部23および動力直結シャフト40に形成された固定ピン取付用穴部41に固定ピン50を差し込む。上記のような組立方法により、ジョイント機構1が組み立てられる。
【0055】
本実施形態では、上記のように、球頭パーツ10の頭部12に、突起部15を設け、球頭保持パーツ20に、球頭パーツ10の突起部15に対して球頭パーツ10に加えられる水平方向の回転力を伝達可能に係合する突起係合部22を設けることによって、球頭パーツ10の頭部12に水平方向の回転力が加えられた場合に、球頭パーツ10の頭部12に加えられた水平方向の回転力を球頭パーツ10の頭部12の突起部15を介して球頭保持パーツ20の突起係合部22に確実に伝達することができるので、球頭パーツ10に加えられた水平方向の回転力により球頭保持パーツ20を水平方向に回転させることができる。ここで、図16を参照して、本実施形態によるジョイント機構1の比較例として、ユニバーサルジョイント機構500の構成について説明する。図16に示すように、比較例によるユニバーサルジョイント機構500は、頭パーツ501と、シャフト保持部材502と、シャフト503と、頭支持パーツ504と、スペーサ505と、スペーサ506と、シャフト507と、動力直結シャフト508と、固定ピン509とを備えている。すなわち、比較例によるユニバーサルジョイント機構500は、9つの部材により構成されている。これに対して、本実施形態では、上記のように、5つの部品によりジョイント機構1を構成することができるので、9つの部品から構成される比較例によるユニバーサルジョイント機構500と比べて、本実施形態によるジョイント機構1の部品点数の増加を抑制することができる。また、部品点数が少ないことにより、本実施形態によるジョイント機構1の組立作業性を、比較例によるユニバーサルジョイント機構500の組立作業性と比べて向上させることができる。
【0056】
また、本実施形態では、上記のように、球頭パーツ10に水平方向の回転力が加えられた場合に、球頭パーツ10の突起部15と球頭保持パーツ20の突起係合部22のくびれ部22aとが水平方向の回転力を伝達可能に係合することにより、球頭パーツ10が水平方向に回転することによって、球頭保持パーツ20の突起係合部22のくびれ部22aの幅W2が球頭パーツ10の頭部12の突起部15の幅W1よりも大きい場合と異なり、球頭パーツ10に水平方向の回転力が加えられた場合に、突起部15とくびれ部22aとの間のがたつきを小さくすることができるので、回転量を精度よく調整することができる。
【0057】
また、本実施形態では、上記のように、球頭パーツ10が垂直に配置された状態から球頭パーツ10が平面視で最も大きく傾倒する45度方向(135度方向、225度方向、315度方向)に傾倒動作するように球頭パーツ10に外力が加えられた場合に、突起部15が突起係合部22のくびれ部22aの内表面部221aおよび幅広部22bの内表面部221bに沿って移動することによって、くびれ部22aにより水平方向の回転力を伝達しながら、幅広部22bにより容易に球頭パーツ10が最も大きく傾倒する45度方向(135度方向、225度方向、315度方向)に傾倒動作させることができる。
【0058】
また、本実施形態では、上記のように、球頭パーツ10が垂直に配置された状態から球頭パーツ10が平面視で最も大きく傾倒する方向に傾倒動作するように球頭パーツ10に外力が加えられた場合に、円柱形状の突起部15の外表面部15aが突起係合部22のくびれ部22aから幅広部22bに沿った円弧形状の内表面部221aおよび221bに沿って移動することによって、たとえば、突起部15が三角柱形状や四角柱形状に形成される場合と異なり、円柱形状の突起部15を円弧形状を有する突起係合部22のくびれ部22aの内表面部221aおよび幅広部22bの内表面部221bに沿ってより滑らかに(安定して)移動させることができる。
【0059】
また、本実施形態では、上記のように、突起係合部22を、くびれ部22aとくびれ部22aを挟むように設けられた幅広部22bとにより瓢箪形状を有するように形成することによって、突起係合部22の形状を瓢箪形状にすることにより、容易に、くびれ部22aとくびれ部22aを挟むように設けられた幅広部22bとを有する突起係合部22を構成することができる。
【0060】
また、本実施形態では、上記のように、瓢箪形状の突起係合部22を、くびれ部22aと幅広部22bとを含む長穴にすることによって、球頭パーツ10が垂直に配置された状態から球頭パーツ10が平面視で最も大きく傾倒する45度方向(135度方向、225度方向、315度方向)に傾倒動作するように球頭パーツ10に外力が加えられた場合に、容易に、突起部15を突起係合部22のくびれ部22aと幅広部22bとを含む長穴の内表面部221a(221b)に沿って滑らかに(安定して)移動させることができる。
【0061】
また、本実施形態では、上記のように、頭部12の下方部分に形成された平坦面部13aに圧縮コイルバネ30を取り付けることにより、球頭パーツ10に傾倒動作させる外力が加えられていない場合に、球頭パーツ10の中心軸Bが略垂直を維持することによって、球頭パーツ10に傾倒動作させる外力が加えられていない状態で、球頭パーツ10を中心軸Bが略垂直になるように維持することができる。また、球頭パーツ10に加えられた傾倒動作させる外力が解除された際に、自動的に球頭パーツ10の中心軸Bを略垂直の位置に戻す(復帰させる)ことができる。
【0062】
また、本実施形態では、上記のように、突起部15の中心軸Aを、球頭パーツ10の中心軸Bに対して垂直方向で、かつ、頭部12の中心近傍Oに配置することによって、突起部15の中心軸Aが球頭パーツ10の中心軸Bに対して垂直方向(Z方向)以外の方向で、かつ、頭部12の中心O近傍以外の部分に配置される場合と異なり、頭部12に水平方向の回転力が加えられた場合に、確実に、水平方向の回転力を球頭保持パーツ20に伝達することができる。
【0063】
また、本実施形態では、上記のように、球頭保持パーツ20の突起係合部22に、幅広部22bの幅W3と略同じ幅W4で下方に延びるように形成された溝部22cを設けることによって、球頭パーツ10を球頭保持パーツ20に組み付ける際に、容易に、球頭パーツ10の突起部15を球頭保持パーツ20の突起係合部22の溝部22cを介して突起係合部22に組み付けることができる。
【0064】
なお、今回開示された実施形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施形態の説明ではなく特許請求の範囲によって示され、さらに特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれる。
【0065】
たとえば、上記実施形態では、本発明のジョイント機構を備える操作部を有する装置の一例としてハプティックコントローラを示したが、本発明はこれに限られない。本発明では、ジョイント機構を備える操作部をハプティックコントローラ以外の装置(電子機器等)にも適用することが可能である。具体的には、ジョイント機構を携帯電話やPDA(Personal Digital Assistant)などの携帯機器の傾倒と水平方向の回転とを両立させる操作部などにも適用可能である。このように、ジョイント機構をさまざまな装置(電子機器等)に応用することが可能となるので、応用範囲が広がることにより、製品価値を高めることが可能となる。
【0066】
また、上記実施形態では、本発明の突起係合部の一例として、くびれ部および幅広部を含む瓢箪形状の貫通した長穴を示したが、本発明はこれに限られない。本発明では、球頭パーツに加えられる水平方向の回転力を突起係合部に伝達することが可能であれば、くびれ部および幅広部を含む瓢箪形状の貫通した長穴以外の突起係合部でもよい。たとえば、突起係合部を溝部により形成してもよい。
【0067】
また、上記実施形態では、球頭パーツに4つの突起部を形成する例を示したが、本発明はこれに限られない。たとえば、球頭パーツに1つ以上3つ以下または5つ以上の突起部を形成してもよい。
【0068】
また、上記実施形態では、球頭パーツが略垂直に配置されるように球頭パーツを付勢する付勢部材の一例として圧縮コイルバネを適用する例を示したが、本発明はこれに限られない。たとえば、球頭パーツが略垂直に配置されるように球頭パーツを付勢することが可能であれば、圧縮コイルバネ以外にゴムなどの弾性体からなる付勢部材を用いてもよいし、球頭パーツの底部または動力直結シャフトに付勢構造を一体的に設ける構成でもよい。
【符号の説明】
【0069】
1 ジョイント機構
10 球頭パーツ(頭部材)
12 頭部
13a 平坦面部(取付部)
15 突起部
20 球頭保持パーツ(頭保持部材)
22 突起係合部
22a くびれ部
22b 幅広部
30 圧縮コイルバネ(付勢部材)
101 操作部
【特許請求の範囲】
【請求項1】
少なくとも一部に球状の表面を有する頭部を含む頭部材と、
前記頭部材を傾倒動作させることが可能なように前記頭部材の球状の表面を保持する頭保持部材とを備え、
前記頭部材の前記頭部には、突起部が設けられ、
前記頭保持部材には、前記頭部材の前記突起部に対して前記頭部材に加えられる水平方向の回転力を伝達可能に係合する突起係合部が設けられている、ジョイント機構。
【請求項2】
前記頭保持部材の前記突起係合部は、前記頭部材の前記突起部の幅と略同じ幅を有するくびれ部を含み、
前記頭部材に水平方向の回転力が加えられた場合に、前記頭部材の前記突起部と前記頭保持部材の前記突起係合部の前記くびれ部とが水平方向の回転力を伝達可能に係合することにより、前記頭部材が水平方向に回転するように構成されている、請求項1に記載のジョイント機構。
【請求項3】
前記頭保持部材の前記突起係合部は、前記くびれ部を挟むように設けられ、前記くびれ部の幅よりも大きい幅を有する幅広部をさらに含み、
前記頭部材が垂直に配置された状態から前記頭部材が平面視で最も大きく傾倒する方向に傾倒動作するように前記頭部材に外力が加えられた場合に、前記突起部は、前記突起係合部の前記くびれ部および前記幅広部の内表面部に沿って移動するように構成されている、請求項2に記載のジョイント機構。
【請求項4】
前記突起部は、円柱形状を有し、
前記突起係合部は、前記くびれ部から前記幅広部に沿って円弧形状を有し、
前記頭部材が垂直に配置された状態から前記頭部材が平面視で最も大きく傾倒する方向に傾倒動作するように前記頭部材に外力が加えられた場合に、前記円柱形状の突起部の外表面部は、前記突起係合部の前記くびれ部から前記幅広部に沿った前記円弧形状の内表面部に沿って移動するように構成されている、請求項3に記載のジョイント機構。
【請求項5】
前記突起係合部は、前記くびれ部と前記くびれ部を挟むように設けられた前記幅広部とにより瓢箪形状を有するように形成されている、請求項3または4に記載のジョイント機構。
【請求項6】
前記瓢箪形状の突起係合部は、前記くびれ部と前記幅広部とを含む長穴である、請求項5に記載のジョイント機構。
【請求項7】
前記頭部材が略垂直に配置されるように前記頭部材を付勢する付勢部材をさらに備え、
前記頭部の下方部分には、前記付勢部材が取り付けられる取付部が形成されており、
前記頭部の下方部分に形成された前記取付部に前記弾性部材が取り付けられることにより、前記頭部材に傾倒動作させる外力が加えられていない場合に、前記頭部材の中心軸が略垂直を維持するように構成されている、請求項1〜6のいずれか1項に記載のジョイント機構。
【請求項8】
前記取付部は、前記頭部の下方部分の一部を切り欠いて形成された平坦面部を含み、
前記付勢部材は、前記平坦面部に取り付けられる圧縮コイルバネを含む、請求項7に記載のジョイント機構。
【請求項9】
前記突起部の中心軸は、前記頭部材の中心軸に対して垂直方向で、かつ、前記頭部の中心近傍に配置されている、請求項1〜8のいずれか1項に記載のジョイント機構。
【請求項10】
前記頭保持部材の前記突起係合部は、前記頭部材の前記突起部の幅と略同じ幅を有するくびれ部と、前記くびれ部を挟むように設けられ、前記くびれ部の幅よりも大きい幅を有する幅広部とを含み、
前記頭保持部材の前記突起係合部は、前記幅広部の幅と略同じ幅で下方に延びるように形成された溝部をさらに含む、請求項1〜9のいずれか1項に記載のジョイント機構。
【請求項11】
操作部に内蔵され、少なくとも一部に球状の表面を有する頭部を含む頭部材と、前記頭部材を傾倒動作させることが可能なように前記頭部材の球状の表面を保持する頭保持部材とを含むジョイント機構を備え、
前記頭部材の前記頭部には、突起部が設けられ、
前記頭保持部材には、前記頭部材の前記突起部に対して前記頭部材に加えられる水平方向の回転力を伝達可能に係合する突起係合部が設けられている、ジョイント機構を備える操作部を有する装置。
【請求項1】
少なくとも一部に球状の表面を有する頭部を含む頭部材と、
前記頭部材を傾倒動作させることが可能なように前記頭部材の球状の表面を保持する頭保持部材とを備え、
前記頭部材の前記頭部には、突起部が設けられ、
前記頭保持部材には、前記頭部材の前記突起部に対して前記頭部材に加えられる水平方向の回転力を伝達可能に係合する突起係合部が設けられている、ジョイント機構。
【請求項2】
前記頭保持部材の前記突起係合部は、前記頭部材の前記突起部の幅と略同じ幅を有するくびれ部を含み、
前記頭部材に水平方向の回転力が加えられた場合に、前記頭部材の前記突起部と前記頭保持部材の前記突起係合部の前記くびれ部とが水平方向の回転力を伝達可能に係合することにより、前記頭部材が水平方向に回転するように構成されている、請求項1に記載のジョイント機構。
【請求項3】
前記頭保持部材の前記突起係合部は、前記くびれ部を挟むように設けられ、前記くびれ部の幅よりも大きい幅を有する幅広部をさらに含み、
前記頭部材が垂直に配置された状態から前記頭部材が平面視で最も大きく傾倒する方向に傾倒動作するように前記頭部材に外力が加えられた場合に、前記突起部は、前記突起係合部の前記くびれ部および前記幅広部の内表面部に沿って移動するように構成されている、請求項2に記載のジョイント機構。
【請求項4】
前記突起部は、円柱形状を有し、
前記突起係合部は、前記くびれ部から前記幅広部に沿って円弧形状を有し、
前記頭部材が垂直に配置された状態から前記頭部材が平面視で最も大きく傾倒する方向に傾倒動作するように前記頭部材に外力が加えられた場合に、前記円柱形状の突起部の外表面部は、前記突起係合部の前記くびれ部から前記幅広部に沿った前記円弧形状の内表面部に沿って移動するように構成されている、請求項3に記載のジョイント機構。
【請求項5】
前記突起係合部は、前記くびれ部と前記くびれ部を挟むように設けられた前記幅広部とにより瓢箪形状を有するように形成されている、請求項3または4に記載のジョイント機構。
【請求項6】
前記瓢箪形状の突起係合部は、前記くびれ部と前記幅広部とを含む長穴である、請求項5に記載のジョイント機構。
【請求項7】
前記頭部材が略垂直に配置されるように前記頭部材を付勢する付勢部材をさらに備え、
前記頭部の下方部分には、前記付勢部材が取り付けられる取付部が形成されており、
前記頭部の下方部分に形成された前記取付部に前記弾性部材が取り付けられることにより、前記頭部材に傾倒動作させる外力が加えられていない場合に、前記頭部材の中心軸が略垂直を維持するように構成されている、請求項1〜6のいずれか1項に記載のジョイント機構。
【請求項8】
前記取付部は、前記頭部の下方部分の一部を切り欠いて形成された平坦面部を含み、
前記付勢部材は、前記平坦面部に取り付けられる圧縮コイルバネを含む、請求項7に記載のジョイント機構。
【請求項9】
前記突起部の中心軸は、前記頭部材の中心軸に対して垂直方向で、かつ、前記頭部の中心近傍に配置されている、請求項1〜8のいずれか1項に記載のジョイント機構。
【請求項10】
前記頭保持部材の前記突起係合部は、前記頭部材の前記突起部の幅と略同じ幅を有するくびれ部と、前記くびれ部を挟むように設けられ、前記くびれ部の幅よりも大きい幅を有する幅広部とを含み、
前記頭保持部材の前記突起係合部は、前記幅広部の幅と略同じ幅で下方に延びるように形成された溝部をさらに含む、請求項1〜9のいずれか1項に記載のジョイント機構。
【請求項11】
操作部に内蔵され、少なくとも一部に球状の表面を有する頭部を含む頭部材と、前記頭部材を傾倒動作させることが可能なように前記頭部材の球状の表面を保持する頭保持部材とを含むジョイント機構を備え、
前記頭部材の前記頭部には、突起部が設けられ、
前記頭保持部材には、前記頭部材の前記突起部に対して前記頭部材に加えられる水平方向の回転力を伝達可能に係合する突起係合部が設けられている、ジョイント機構を備える操作部を有する装置。
【図1】



【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】

【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2013−108566(P2013−108566A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−254051(P2011−254051)
【出願日】平成23年11月21日(2011.11.21)
【出願人】(000201113)船井電機株式会社 (7,855)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月21日(2011.11.21)
【出願人】(000201113)船井電機株式会社 (7,855)
【Fターム(参考)】
[ Back to top ]