
結晶方位測定装置

【課題】ノッチ形状誤差等によるノッチ位置決め誤差が補正でき、半径方向結晶方位の測定の精度が高い結晶方位測定装置を提供する。
【解決手段】円筒状結晶2をその円筒軸に対し回転させる回転部11と、円筒状結晶2を回転し、円筒状結晶2の周側面に設けられたノッチ2aを基準に円筒状結晶2を位置決めする位置決め部12と、円筒状結晶2が位置決めされると、回転軸に対するノッチ2の位置を測定するノッチ測定部12と、周側面にX線を照射して半径方向の結晶方位を測定する結晶方位測定部13と、結晶方位測定部13で測定した結晶方位をノッチ測定部12で測定したノッチの位置で補正して半径方向の結晶方位を求める補正部142とを備える。
【解決手段】円筒状結晶2をその円筒軸に対し回転させる回転部11と、円筒状結晶2を回転し、円筒状結晶2の周側面に設けられたノッチ2aを基準に円筒状結晶2を位置決めする位置決め部12と、円筒状結晶2が位置決めされると、回転軸に対するノッチ2の位置を測定するノッチ測定部12と、周側面にX線を照射して半径方向の結晶方位を測定する結晶方位測定部13と、結晶方位測定部13で測定した結晶方位をノッチ測定部12で測定したノッチの位置で補正して半径方向の結晶方位を求める補正部142とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、円筒状に研削されて側面にノッチが加工されたシリコン(Si)やインジウム・リン(InP)等の単結晶試料であるインゴットの半径方向あるいは軸方向の結晶方位をX線回折を利用して測定する結晶方位測定装置に関する。
【背景技術】
【0002】
ウエハの生成に用いられるシリコン等の結晶インゴットは、円筒研削機により円筒状に研削されるが、研削時に側面の半径方向の結晶方位(以下、結晶方位は結晶面の法線方向をいう)が測定され、側面に結晶の方位を示すマークであるノッチやオリフラ面が加工される。次に、このマーク付インゴットのインゴット軸方向の結晶方位が測定され、この結晶方位に直交するカット面に対してスライスされることでウエハが生成される。ウエハからICを製造する際、側面に加工されたマークで示される結晶の方位に合わせてICの向きが決められている。
【0003】
従来、ノッチ付インゴットに対して、ノッチを位置決めし、側面測定で半径方向の結晶方位を測定することで、ノッチが正しく研削されたかを確認するとともに、側面の結晶方位の測定のみで、インゴット軸の結晶方向を求める結晶方位測定装置がある(たとえば、特許文献1参照)。
【0004】
特許文献1に記載される結晶方位測定装置では、半径方向の平行でない2方位を測定し、測定された2方位から、軸方向方位を計算によって求めている。特許文献1に記載の技術によれば、ノッチ方位の確認とスライスするカット面の決定を1台の装置で行うことができる。
【特許文献1】特開2000−81398
【発明の開示】
【発明が解決しようとする課題】
【0005】
特許文献1記載の結晶方位測定装置は、位置決めの際、スプリングでスライドする契合板をノッチに契合させたり、契合板の代わりに、機械式センサや光学センサを用いている。通常、ノッチの形状は、ノッチを研削する砥石の形状と消耗程度に左右され、インゴットごとにばらつきがある。このノッチ形状の誤差により、ノッチの位置決め精度が低下する。また、契合板形状と消耗程度やガタ等の影響でもノッチの位置決め精度が低下する。さらに、機械式センサや光学式センサを用いた場合も、ノッチ形状の誤差、センサの分解能や回転のオーバラン等によりノッチの位置決め精度が低下する。このように特許文献1記載の結晶方位測定装置は、ノッチの形状誤差等の影響で生じるノッチの位置決め誤差がそのまま半径方向の結晶方位の誤差となる問題がある。
【0006】
また、特許文献1記載の結晶方位測定装置には、例えば、軸方向の結晶面(110)のSi結晶の場合、同一の結晶面(110)の半径方向の結晶方位は平行な2方向(0°,180°)のみで、これら2方向測定しても軸方向ができないという問題がある。
【0007】
さらに、特許文献1の結晶方位測定装置には、インゴットを研削する円筒研削機のノッチ研削砥石のメンテナンス(保守点検)が厄介であるという問題がある。すなわち、砥石が不良になった場合の修理や交換のタイミングが遅れるのを防ぐため、研削機の砥石の状態を頻繁に点検する必要がある。
【0008】
本発明は、ノッチの形状誤差によらず精度よく半径方向結晶方位を測定することを目的とする。また、同一面指数の半径方向結晶方位が平行な2方向のみになってしまう場合でも、側面測定のみで軸方向結晶方位を求めることを目的とする。さらに、円筒研削機のメンテナンスを容易とすることを目的とする。
【課題を解決するための手段】
【0009】
上記の課題を達成するため、請求項1記載の発明は、円筒状結晶をその円筒軸に対し回転させる回転部と、前記円筒状結晶を回転し、前記円筒状結晶の周側面に設けられたノッチを基準に前記円筒状結晶を位置決めする位置決め部と、前記円筒状結晶が位置決めされると、回転軸に対する前記ノッチの位置を測定するノッチ測定部と、前記周側面にX線を照射して半径方向の結晶方位を測定する結晶方位測定部と、前記結晶方位測定部で測定した結晶方位を前記ノッチ測定手段で測定したノッチの位置で補正して半径方向の結晶方位を求める補正部とを備えることを要旨とする。
【0010】
上記構成により、ノッチを位置決めした後で、ノッチの位置の測定をして補正するので、ノッチ形状誤差等によるノッチ位置決め誤差が補正でき、精度良く半径方向結晶方位を測定することができる。
【0011】
請求項2記載の発明は、前記ノッチ測定部は、前記ノッチの形状を測定することによって、ノッチの位置を求めることを要旨とする。
【0012】
上記構成により、ノッチ表面の座標をノッチの大きさに比べて十分細かい間隔で連続して測定して得たノッチの形状より正確にノッチの位置を求めることができる。
【0013】
請求項3記載の発明は、請求項2において、前記ノッチ測定部は、前記ノッチの形状から、前記ノッチの幅、前記ノッチの深さ、前記ノッチの開き角度、前記ノッチの傾き、又は前記ノッチの底半径のうち少なくとも一つを求めることを要旨とする。
【0014】
上記構成により、ノッチ研削器のメンテナンス用データを得ることができるとともに、インゴットが不良品であるか否かの判断を行うことができる。
【0015】
請求項4記載の発明は、請求項2又は3において、前記ノッチ測定部は、前記ノッチの形状を測定するレーザ変位計を有することを要旨とする。
【0016】
上記構成により、レーザ変位計でノッチの表面の変位を測定して非接触でノッチの形状を得ることができる。
【0017】
請求項5記載の発明は、請求項1乃至4において、前記半径方向の結晶方位の平行でない2つを測定するように前記結晶方位測定部と前記回転部を制御する測定制御部と、測定された2つの結晶方位から、前記円筒軸の方向の結晶方位を計算する軸方向結晶方位計算部とを有することを要旨とする。
【0018】
上記構成により、側面測定のみで、測定した2つの半径方向結晶方位から軸方向結晶方位を計算することができる。
【0019】
請求項6記載の発明は、請求項5において、前記2つの結晶方位は互いに異なるミラー指数の結晶方位であることを要旨とする。
【0020】
上記構成により、同一面指数の半径方向結晶方位がすべて平行となる場合でも異なるミラー指数の非平行の2つの半径方向結晶方位を測定することで、側面測定のみで、測定した2つの半径方向結晶方位から軸方向結晶方位を計算することができる。
【発明の効果】
【0021】
本発明によれば、ノッチを位置決めした後で、ノッチ位置の測定をして補正するので、ノッチ形状の誤差等によるノッチ位置決め誤差が補正でき、精度よく半径方向結晶方位を測定することができる。
【発明を実施するための最良の形態】
【0022】
図1は、第1の実施形態の概略構成図である。
【0023】
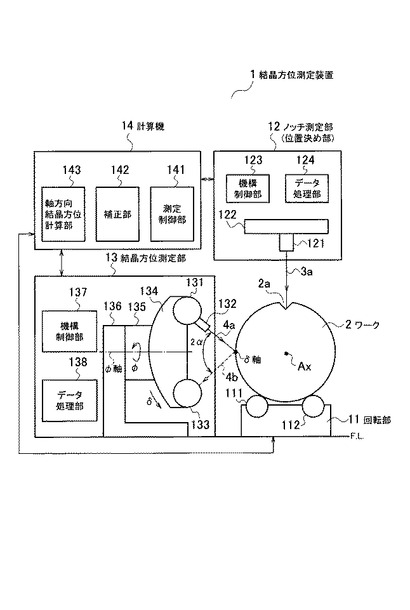
図1で、結晶方位測定装置1は、円筒状結晶であるインゴット(ワーク2)を円筒軸(インゴット軸)Axに対し回転させる回転部11と、ワーク2の側面のノッチ2aを位置決めするあるいはノッチ2aの位置を測定するノッチ測定部(位置決め部)12と、ワーク2の側面の結晶方位を測定する結晶方位測定部13と、ワーク2の回転、ノッチの測定、結晶方位の測定等を制御する計算機14を備える。
【0024】
回転部11は、図1に示すように、ワーク2を支持する2つのローラ111,112とローラ111あるいはローラ112を回転させてワーク2をインゴット軸Axを中心に回転させる回転機構(不図示)と、回転機構を制御する機構制御部(不図示)を有する。
【0025】
ノッチ測定部12は、図1に示すように、レーザ変位計121と、レーザ変位計121をインゴット軸Axと直交する水平方向に移動させる直進機構122と、機構制御部123と、データ処理部124を有し、ノッチの位置決めをするとともに、ノッチを測定する。
【0026】
レーザ変位計121は、機構制御部123の制御によって直進機構122に制御されながらワーク2にレーザビーム3aを照射し、レーザビーム3aがワーク2で反射した反射光を測定することで、レーザビーム3aに沿った方向の被照射点の変位を測定する。レーザ変位計121は反射光によって得られる照射点の変位をディジタルデータとしてデータ処理部124に出力する。
【0027】
結晶方位測定部13は、図1に示すように、X線ビーム4aを発生するX線管131、X線ビーム4aが通過するコリメータ132、ワーク2の側面からの回折X線4bを検出するX線検出器133、デルタフレーム134、デルタ駆動部135、ファイ駆動部136、機構制御部137、及びデータ処理部138を有する。
【0028】
結晶方位測定部13は、計算機14から結晶方位の測定を制御する制御信号が入力されると、ファイ駆動部136によって軸φを2方向(あるいは4方向)それぞれに固定して、デルタ駆動部135によってδ駆動のスキャンを行いそれぞれのφの位置での結晶方位傾斜角を求める。これにより結晶方位(法線)のφ軸を基準とするAx方向、及びAx方向と直行する方向への傾斜角が求められる。機構制御部137はφ回転とδ回転のシーケンス制御を行い、データ処理部138は、φ、δの値とX線検出器133の出力から結晶方位(φ軸からの2方向の傾斜角δ0、δ90)を算出し、計算機14に出力する。
【0029】
計算機14は一般的なパーソナルコンピュータであり、ハードウェア構成として、図1で図示しない筺体、電源、バスライン、CPU、メモリ、インタフェース、ディスク、通信部、表示器、キーボード、マウス、プリンタ等を備える。計算機14はソフトウェアの機能ブロックとして、測定制御部141、補正部142、軸方向結晶方位計算部143を有する。ディスクに記憶されているコンピュータプログラムが、メモリに読み込まれて起動されることで、測定制御部141、補正部142及び軸方向結晶方位計算部143は各機能を発揮する。
【0030】
測定制御部141は、回転部11、ノッチ測定部12及び結晶方位測定部13にそれぞれ制御信号を出力することで、測定に関する全てのシーケンス動作を制御する。補正部142は、ノッチ測定部12から入力するノッチ位置情報によって、結晶方位測定部13から入力する測定方位を補正する。軸方向結晶方位計算部143は、結晶方位測定部13から入力する半径方向の結晶方位から、軸方向結晶方位を算出する。
【0031】
図2は、測定対象となるワーク2の一例である。図2では、立法体結晶格子を模式的に四角形で表している。図2において、シリコンの単結晶であるワーク2の軸方向方位はミラー指数(100)で、ノッチ2aは(110)方向に合わせて研磨されている。ここでは、90°毎の半径方向結晶方位(110)4方向のうちの2方向の結晶方位h1及び結晶方位h2を測定し、結晶方位(110)のノッチ2a方位からのずれを求めるとともに、結晶方位h1と結晶方位h2から軸方向結晶方位h0のインゴット軸Axからのずれを計算する。
【0032】
以下、図3乃至図6を参照して本発明の最良の実施形態に係る結晶方位測定装置1の作用について説明する。
【0033】
図3は結晶方位測定装置1における結晶方位の測定の処理を説明するフローチャートである。図3に示される処理の全体は、測定制御部141によって制御される。
【0034】
まず、結晶方位測定装置1は、ノッチ2aを位置決めする(S1)。具体的には、測定制御部141がノッチ測定部12にノッチを位置決めする制御信号を出力する。制御信号を入力したノッチ測定部12では、機構制御部123がレーザ変位計121を直進方向に移動させ、ワーク2の軸Axのほぼ真上に停止させる。レーザ変位計121は、レーザビーム3aをワーク2aに照射し、その反射光を変位として検出し、測定制御部141に出力する。測定制御部141は、レーザ変位計121から出力される変位を一定時間間隔で順次入力しながら回転部11にワーク2を回転させる制御信号を出力し、ワーク2の回転を開始させる。測定制御部141は、レーザ変位計121から入力した変位が前回入力した変位と比較して所定量変化したとき、ノッチ2aにレーザビーム3aが照射されていると判定する。これによって、回転部11にワーク2の回転を停止させる制御信号を出力し、ノッチ2aの位置がワーク2で最も高い位置に位置決めされる。
【0035】
ノッチ2aが位置決めされると、結晶方位測定装置1は、ノッチの形状を測定する(S2)。ここで、ノッチの形状の測定は、ノッチの表面(インゴットの表面)の座標をノッチ2aの大きさに比べて十分細かい間隔で連続して測定することで行われる。具体的には、測定制御部141がノッチ測定部12にノッチ2aを測定する制御信号を出力する。制御信号を入力したノッチ測定部12では、レーザ変位計121を直進させながら細かい間隔で変位を測定してノッチ形状を測定する。
【0036】
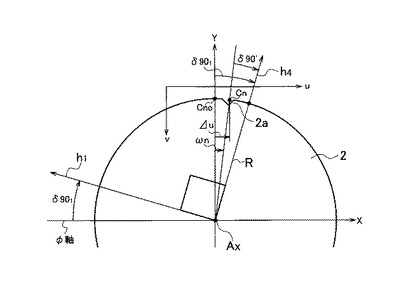
図4にノッチ形状の一例を示す。図4において、座標uはレーザ変位計121の直進方向、座標vはレーザ変位計121で測定された変位である。データ処理部124は、レーザ変位計121で得られたノッチ形状からノッチの位置として、円筒に沿ったノッチ幅の中央点(ノッチ位置)Cnの座標u,vを求める。また、データ処理部124は、ノッチ形状のパラメータとして、ノッチ幅wn、ノッチ深さdn、開き角度βn、開き角度の半径方向からの傾き(ノッチの傾き)βc、底半径rfを算出する。このとき、データ処理部124は、ノッチの斜面位置は最小二乗法により直線でフィッティングし、底部位置は最小二乗法により円でフィッティングして求め、フィッティングした線とデータ点との誤差からノッチ面の凹凸の程度を求め基準値を超えていないかの判定も行う。ノッチ測定部12は、測定結果(ノッチ位置Cn、幅wn、深さdn、角度βn、傾きβc、底半径rf、判定結果)を計算機14に出力する。
【0037】
ノッチの形状が測定されると、結晶方位測定装置1は、結晶方位h1を測定する(S3)。具体的には、測定制御部141が結晶方位測定部13に結晶方位h1を測定する制御信号を出力する。制御信号を入力した結晶方位測定部13では、X線管131によってX線ビーム4aを照射し、回折X線4bを検出してワーク2の結晶方位h1を測定する。結晶方位h1は、φ軸からの2方向の傾斜角δ01(Ax方向)、δ901(Ax直交方向)として得られる。
【0038】
その後、結晶方位測定装置1は、半径方向結晶方位δ90’を算出する(S4)。具体的には、結晶方位h1が検出されると、補正部142は、測定制御部141に制御されてノッチ停止誤差を補正する停止誤差角度ωnを求め、停止誤差角度ωnによって補正した半径方向結晶方位δ90’を算出する。
【0039】
図5に半径方向結晶方位を計算する幾何図の一例を示す。補正部142では、まずステップS2で求められたノッチ位置Cn、基準位置Cn0及び既知であるワーク2の半径Rから、ノッチ2aの停止誤差角度ωnを算出する。このとき、基準位置Cn0は予め2つのローラ111,112の2等分線上にノッチ2aが位置するような治具を用いて測定し、メモリで記憶しておく。ノッチ位置Cnと基準位置Cn0との直進方向の差Δuを用いて、停止誤差角度ωnは、式(1)によって求められる。
【0040】
ωn=asin(Δu/R) ・・・(1)
次に、補正部142は、結晶方位h1の測定値δ901を停止誤差角度ωnを用いて補正し、ノッチ基準の半径方向結晶位置(110)δ90’を求める。半径方向結晶位置δ90’は、式(2)によって求められる。
【0041】
δ90’=δ901−ωn ・・・(2)
続いて、結晶方位測定装置1は、ワーク2を90°回転させる(S5)。具体的には、測定制御部141がワーク2を回転させる制御信号を出力する。制御信号を入力した回転部11は、ワーク2をCW方向に90°回転させる。このワーク2の回転は、ローラ111あるいはローラ112を回転させて行うため、すべりやワーク2の直径に誤差があること等により、回転誤差が生じる。ワーク2の回転角Ωは、約90°で未知数である。
【0042】
ワーク2が回転されると、結晶方位測定装置1は、結晶方位h2を測定する(S6)。具体的には、測定制御部141が結晶方位測定部13に結晶方位h2を測定する制御信号を出力する。制御信号を入力した結晶方位測定部13では、X線管131によってX線ビーム4aを照射し、回折X線4bを検出してワーク2の結晶方位h2を測定する。結晶方位h2は、φ軸からの2方向の傾斜角δ02(Ax方向)、δ902(Ax直交方向)として得られる。
【0043】
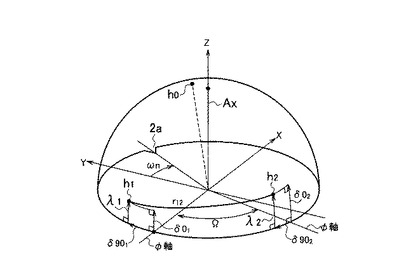
その後、結晶方位測定装置1は、軸方向結晶方位h0を計算する(S7)。具体的には、結晶方位h2が検出されると、軸方向結晶方位計算部143は、測定制御部141に制御されて結晶方位h1,h2から軸方向結晶方位h0を算出する。このとき、結晶方位h1,h2が互いに90°を成すため、回転角Ωの正確な値を知ることができるので、回転誤差が補正される。
【0044】
図6に、軸方向結晶方位h0の計算幾何図の一例を示す。図6で座標XYZは、ワーク2に固定した座標系で、Z軸は軸Axである。X軸は、結晶方位h1測定時のφ軸である。結晶方位h1と結晶方位h2間の角度を角度r12(=90°)とすると、回転角Ωは、式(3)〜(5)によって求められる。
【0045】
λ1=asin[cos(δ901)・sin(δ01)/√{1−(sin(δ01)・sin(δ901))2}] ・・・(3)
λ2=asin[cos(δ902)・sin(δ02)/√{1−(sin(δ02)・sin(δ902))2}] ・・・(4)
Ω=acos[{cos(r12)−sin(λ1)・sin(λ2)}/{cos(λ1)・cos(λ2)}] ・・・(5)
式(5)は、r12≠90°の場合にも適用できる。
【0046】
回転角Ωとλ1,2が分かれば、結晶方位h1,2のXYZ成分が求められるので、軸方向結晶方位h0のXYZ成分は、式(6)のベクトルの計算で求められる。
【0047】
h0=h1×h2/√{1−(h1・h2)2} ・・・(6)
式(6)で、「×」はベクトル積、「・」は内積である。また、式(6)は、r12≠90°の場合にも適用できる。
【0048】
XYZ座標で軸方向結晶方位h0が求められると、軸方向結晶方位h0は、極座標に変換でき、軸Axを基準とした傾斜角と(例えばY軸からCW方向にとった)傾斜方位(δ,ωδ)として求めることができる。次に、(δ,ωδ−ωn)を計算すると、これは軸Axとノッチを基準とした軸方向結晶方位h0となる。また、(δ,ωδ−δ901)を計算するとこれは軸Axと半径方向結晶方位δ90’を基準としたh0となる。
【0049】
結晶方位測定装置1では、ステップS2で求めたノッチの形状とノッチの形状のパラメータ、ステップS4で求めた半径方向結晶方位δ90’、ステップS7で求めた軸方向結晶方位h0をワーク2のシリアルナンバーと共に表示するともに、ディスクに記憶する。
【0050】
例えば、ノッチの形状や形状のパラメータが所定範囲を超えたときやノッチ面の凹凸が基準値を超えたとき、自動的に不良品と判断して不良品である旨の警報を出力するようにすることもできる。また、ディスクに記憶されたノッチの形状、形状のパラメータ及び結晶方位を過去に遡って接続される表示器に表示させれば、研削機の砥石の状態変化がわかり、研削機のメンテナンスに使用できる。
【0051】
なお、ノッチの形状、形状のパラメータ及び結晶方位は、結晶方位測定装置1のディスクに記憶させる他、通信回線で接続される他の装置に送信してもよい。
【0052】
上述したように、本発明の最良の実施形態に係る結晶方位測定装置1によれば、ノッチを位置決めした後で、ノッチの位置の測定をして補正するので、ノッチ形状誤差等によるノッチ位置決め誤差が補正でき、制度良く半径方向結晶方位を測定することができる。
【0053】
また、結晶方位測定装置1によれば、ノッチの形状を測定しているので、ノッチ位置が正確に求められ、精度よく半径方向結晶方位を測定することができる。また、ノッチの形状を示すパラメータを求めているので、これを研削機(ノッチの研削砥石)のメンテナンス用のデータとして使用でき、メンテナンスが容易となる。
【0054】
さらに、結晶方位測定装置1によれば、側面測定のみで軸方向結晶方位を求めることができる。軸方向結晶方位をインゴット軸Axとノッチを基準に、又はインゴット軸Axと半径方向結晶方位を基準に求めることができる。また、結晶方位h1測定は、位置決め後回転させずに行っているので回転の誤差が無く、結晶方位h2の測定も回転位置決め(Ω)の誤差を補正しているので、回転誤差無く軸方向方位を求めることができる。
【0055】
(第1変形例)
上述した結晶方位測定装置1によれば、結晶方位h1,h2間の角度r12が90°であったが、角度r12が90°でない場合であっても結晶方位を測定することができる。
【0056】
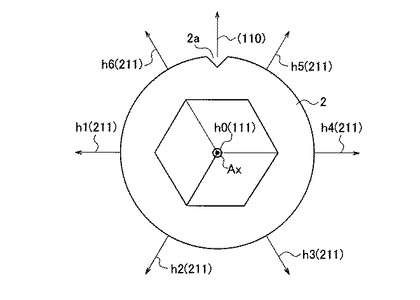
図7は第1変形例に係る結晶方位測定装置において測定するワーク2の一例である。図7で、六角形は斜めから見た立方体結晶格子を模式的に表している。シリコンの単結晶であるワーク2の軸方向方位は、ミラー指数(111)で、ノッチ2aは(110)方向にあわせて研磨している。この場合、60°おきの半径方向結晶方位(211)の6方向のうちの2方向、結晶方位h1,h2を測定する。
【0057】
第1変形例に係る結晶方位測定装置では、r12=60°、回転角Ω=約60°となる点のみが異なり、結晶方位測定装置1と同様に結晶方位h1,h2を測定し、同じ計算でノッチ基準の半径方向結晶方位(110)と軸方向結晶方位h0が求められる。
【0058】
r12が90°ではない第1変形例に係る結晶方位測定装置においても、上述した結晶方位測定装置1と同一の効果が得られる。
【0059】
(第2変形例)
上述した結晶方位測定装置1によれば、同じミラー指数の結晶方位h1,h2を測定したが、第2変形例に係る結晶方位測定装置1によれば、ミラー指数が異なる場合であっても結晶方位を測定することができる。
【0060】
第2変形例に係る結晶方位測定装置によれば、X線管131と検出器133の配置角度2αを結晶方位h1の測定と結晶方位h2の測定とで切り換える機構を追加する。配置角度2αの切り換えは、検出器133かX線管131か、あるいは両方を自動で動かすようにする。図8に、第2変形例に係る結晶方位測定装置において測定するワーク2の一例を示す。図8で、四角形は、斜めから見た立方体結晶格子を模式的に表している。シリコンの単結晶であるワーク2の軸方向方位は、ミラー指数(110)で、ノッチ2aは(110)方向にあわせて研磨している。半径方向結晶方位(100)は、平行な結晶方位h1,h3のみで、軸方向が計算できない。(110)も平行な結晶方位h2,h4のみで、軸方向が計算できない。この場合、半径方向結晶方位として、図8に示す結晶方位h1と結晶方位h2を測定する。結晶方位h1は(100)、結晶方位h2は(110)である。
【0061】
第2変形例に係る結晶方位測定装置によれば、結晶方位h1の測定と結晶方位h2の測定で、X線管131と検出器133の配置角度2αを変える点のみが異なり、結晶方位測定装置1と同様に結晶方位h1,h2を測定し、同じ計算でノッチ基準の半径方向結晶方位(110)と軸方向結晶方位h0が求められる。
【0062】
このように、ミラー指数が異なる面を測定することで、同一面指数の半径方向結晶方位が全て平行となる場合でも、側面測定のみで軸方向結晶方位を求めることができる。また、図8に示すワーク2の場合、ノッチの位置決め後、回転させずにh1測定を行うので、(また、h2測定前の回転誤差は補正されるので)回転誤差が無く軸方向結晶方位を求めることができる。
【0063】
ミラー指数が異なる結晶方位を測定する第2変形例に係る結晶方位測定装置においても、上述した結晶方位測定装置1と同一の効果が得られる。
【0064】
(第3変形例)
上述した結晶方位測定装置1によれば、側面のマークとして、ノッチ2aを利用してワーク2を位置決めして結晶方位を測定したが、ノッチの代わりにオリフラ面を研削したワークであっても結晶方位を測定することができる。
【0065】
第3変形例に係る結晶方位測定装置によれば、ノッチ測定部12でノッチの形状を測定する代わりにオリフラ面の傾斜を測定し、これをωnとする。
【0066】
ノッチの代わりにオリフラ面を用いて結晶方位を測定する第3変形例に係る結晶方位測定装置においても、上述した結晶方位測定装置1と同一の効果が得られる。
【0067】
(第4変形例)
上述した結晶方位測定装置1は、レーザ変位計121を備え、レーザ変位計を用いてノッチの形状を測定しているが、ノッチの形状はレーザ変位計121以外であっても測定することができる。
【0068】
第4変形例に係る結晶方位測定装置は、レーザ変位計121以外でノッチの形状を測定する一例として、インゴットの端面を軸方向からTVカメラで撮影し、画像をディジタルデータに変換してデータ処理部124に取り込む。
【0069】
また、その他ではノッチの形状の測定に光切断法等を用いても良い。光切断法は、ファン状の光を側面からノッチに照射し、ファン面から離れたTVカメラで撮影することで形状を測定するものである。
【0070】
(第5変形例)
上述した結晶方位測定装置1によれば、ノッチの形状測定で、レーザ変位計121を水平方向uに移動させて測定している。このとき、レーザビーム3aに対し、ノッチ斜面が垂直から45°程度傾斜するため、測定する変位に誤差が生じることがあり、開き角度βn及び底半径rfの誤差となる。これらの誤差を防ぐため、第5変形例に係る結晶方位測定装置は、移動方向uを3方向(水平からの傾斜+45°、0°、−45°)切り換えてノッチ形状を3回測定し、測定されたこれらのノッチ形状から開き角度を補正してノッチ形状のパラメータを計算する。
【図面の簡単な説明】
【0071】
【図1】本発明の最良の実施形態に係る結晶方位装置の概念図である。
【図2】本発明の最良の実施形態に係る結晶方位測定装置の測定対象となるワークの一例である。
【図3】本発明の最良の実施形態に係る結晶方位測定装置における結晶方位の測定の処理を説明するフローチャートである。
【図4】本発明の最良の実施形態に係る結晶方位測定装置の測定対象となるワークのノッチ形状の一例である。
【図5】本発明の最良の実施形態に係る結晶方位測定装置で半径方向結晶方位を計算する幾何図の一例である。
【図6】本発明の最良の実施形態に係る結晶方位測定装置の軸方向結晶方位の計算幾何図の一例である。
【図7】本発明の第1変形例に係る結晶方位測定装置の測定対象となるワークの一例である。
【図8】本発明の第2変形例に係る結晶方位測定装置の測定対象となるワークの一例である。
【符号の説明】
【0072】
1…結晶方位測定装置
11…回転部
111,112…ローラ
12…ノッチ測定部(位置決め部)
121…レーザ変位計
122…直進機構
123…機構制御部
124…データ処理部
13…結晶方位測定部
131…X線管
132…コリメータ
133…X線検出器
134…デルタフレーム
135…デルタ駆動部
136…ファイ駆動部
137…機構制御部
138…データ処理部
14…計算機
141…測定制御部
142…補正部
143…軸方向結晶方位計算部
2…ワーク(円筒状結晶)
2a…ノッチ
【技術分野】
【0001】
本発明は、円筒状に研削されて側面にノッチが加工されたシリコン(Si)やインジウム・リン(InP)等の単結晶試料であるインゴットの半径方向あるいは軸方向の結晶方位をX線回折を利用して測定する結晶方位測定装置に関する。
【背景技術】
【0002】
ウエハの生成に用いられるシリコン等の結晶インゴットは、円筒研削機により円筒状に研削されるが、研削時に側面の半径方向の結晶方位(以下、結晶方位は結晶面の法線方向をいう)が測定され、側面に結晶の方位を示すマークであるノッチやオリフラ面が加工される。次に、このマーク付インゴットのインゴット軸方向の結晶方位が測定され、この結晶方位に直交するカット面に対してスライスされることでウエハが生成される。ウエハからICを製造する際、側面に加工されたマークで示される結晶の方位に合わせてICの向きが決められている。
【0003】
従来、ノッチ付インゴットに対して、ノッチを位置決めし、側面測定で半径方向の結晶方位を測定することで、ノッチが正しく研削されたかを確認するとともに、側面の結晶方位の測定のみで、インゴット軸の結晶方向を求める結晶方位測定装置がある(たとえば、特許文献1参照)。
【0004】
特許文献1に記載される結晶方位測定装置では、半径方向の平行でない2方位を測定し、測定された2方位から、軸方向方位を計算によって求めている。特許文献1に記載の技術によれば、ノッチ方位の確認とスライスするカット面の決定を1台の装置で行うことができる。
【特許文献1】特開2000−81398
【発明の開示】
【発明が解決しようとする課題】
【0005】
特許文献1記載の結晶方位測定装置は、位置決めの際、スプリングでスライドする契合板をノッチに契合させたり、契合板の代わりに、機械式センサや光学センサを用いている。通常、ノッチの形状は、ノッチを研削する砥石の形状と消耗程度に左右され、インゴットごとにばらつきがある。このノッチ形状の誤差により、ノッチの位置決め精度が低下する。また、契合板形状と消耗程度やガタ等の影響でもノッチの位置決め精度が低下する。さらに、機械式センサや光学式センサを用いた場合も、ノッチ形状の誤差、センサの分解能や回転のオーバラン等によりノッチの位置決め精度が低下する。このように特許文献1記載の結晶方位測定装置は、ノッチの形状誤差等の影響で生じるノッチの位置決め誤差がそのまま半径方向の結晶方位の誤差となる問題がある。
【0006】
また、特許文献1記載の結晶方位測定装置には、例えば、軸方向の結晶面(110)のSi結晶の場合、同一の結晶面(110)の半径方向の結晶方位は平行な2方向(0°,180°)のみで、これら2方向測定しても軸方向ができないという問題がある。
【0007】
さらに、特許文献1の結晶方位測定装置には、インゴットを研削する円筒研削機のノッチ研削砥石のメンテナンス(保守点検)が厄介であるという問題がある。すなわち、砥石が不良になった場合の修理や交換のタイミングが遅れるのを防ぐため、研削機の砥石の状態を頻繁に点検する必要がある。
【0008】
本発明は、ノッチの形状誤差によらず精度よく半径方向結晶方位を測定することを目的とする。また、同一面指数の半径方向結晶方位が平行な2方向のみになってしまう場合でも、側面測定のみで軸方向結晶方位を求めることを目的とする。さらに、円筒研削機のメンテナンスを容易とすることを目的とする。
【課題を解決するための手段】
【0009】
上記の課題を達成するため、請求項1記載の発明は、円筒状結晶をその円筒軸に対し回転させる回転部と、前記円筒状結晶を回転し、前記円筒状結晶の周側面に設けられたノッチを基準に前記円筒状結晶を位置決めする位置決め部と、前記円筒状結晶が位置決めされると、回転軸に対する前記ノッチの位置を測定するノッチ測定部と、前記周側面にX線を照射して半径方向の結晶方位を測定する結晶方位測定部と、前記結晶方位測定部で測定した結晶方位を前記ノッチ測定手段で測定したノッチの位置で補正して半径方向の結晶方位を求める補正部とを備えることを要旨とする。
【0010】
上記構成により、ノッチを位置決めした後で、ノッチの位置の測定をして補正するので、ノッチ形状誤差等によるノッチ位置決め誤差が補正でき、精度良く半径方向結晶方位を測定することができる。
【0011】
請求項2記載の発明は、前記ノッチ測定部は、前記ノッチの形状を測定することによって、ノッチの位置を求めることを要旨とする。
【0012】
上記構成により、ノッチ表面の座標をノッチの大きさに比べて十分細かい間隔で連続して測定して得たノッチの形状より正確にノッチの位置を求めることができる。
【0013】
請求項3記載の発明は、請求項2において、前記ノッチ測定部は、前記ノッチの形状から、前記ノッチの幅、前記ノッチの深さ、前記ノッチの開き角度、前記ノッチの傾き、又は前記ノッチの底半径のうち少なくとも一つを求めることを要旨とする。
【0014】
上記構成により、ノッチ研削器のメンテナンス用データを得ることができるとともに、インゴットが不良品であるか否かの判断を行うことができる。
【0015】
請求項4記載の発明は、請求項2又は3において、前記ノッチ測定部は、前記ノッチの形状を測定するレーザ変位計を有することを要旨とする。
【0016】
上記構成により、レーザ変位計でノッチの表面の変位を測定して非接触でノッチの形状を得ることができる。
【0017】
請求項5記載の発明は、請求項1乃至4において、前記半径方向の結晶方位の平行でない2つを測定するように前記結晶方位測定部と前記回転部を制御する測定制御部と、測定された2つの結晶方位から、前記円筒軸の方向の結晶方位を計算する軸方向結晶方位計算部とを有することを要旨とする。
【0018】
上記構成により、側面測定のみで、測定した2つの半径方向結晶方位から軸方向結晶方位を計算することができる。
【0019】
請求項6記載の発明は、請求項5において、前記2つの結晶方位は互いに異なるミラー指数の結晶方位であることを要旨とする。
【0020】
上記構成により、同一面指数の半径方向結晶方位がすべて平行となる場合でも異なるミラー指数の非平行の2つの半径方向結晶方位を測定することで、側面測定のみで、測定した2つの半径方向結晶方位から軸方向結晶方位を計算することができる。
【発明の効果】
【0021】
本発明によれば、ノッチを位置決めした後で、ノッチ位置の測定をして補正するので、ノッチ形状の誤差等によるノッチ位置決め誤差が補正でき、精度よく半径方向結晶方位を測定することができる。
【発明を実施するための最良の形態】
【0022】
図1は、第1の実施形態の概略構成図である。
【0023】
図1で、結晶方位測定装置1は、円筒状結晶であるインゴット(ワーク2)を円筒軸(インゴット軸)Axに対し回転させる回転部11と、ワーク2の側面のノッチ2aを位置決めするあるいはノッチ2aの位置を測定するノッチ測定部(位置決め部)12と、ワーク2の側面の結晶方位を測定する結晶方位測定部13と、ワーク2の回転、ノッチの測定、結晶方位の測定等を制御する計算機14を備える。
【0024】
回転部11は、図1に示すように、ワーク2を支持する2つのローラ111,112とローラ111あるいはローラ112を回転させてワーク2をインゴット軸Axを中心に回転させる回転機構(不図示)と、回転機構を制御する機構制御部(不図示)を有する。
【0025】
ノッチ測定部12は、図1に示すように、レーザ変位計121と、レーザ変位計121をインゴット軸Axと直交する水平方向に移動させる直進機構122と、機構制御部123と、データ処理部124を有し、ノッチの位置決めをするとともに、ノッチを測定する。
【0026】
レーザ変位計121は、機構制御部123の制御によって直進機構122に制御されながらワーク2にレーザビーム3aを照射し、レーザビーム3aがワーク2で反射した反射光を測定することで、レーザビーム3aに沿った方向の被照射点の変位を測定する。レーザ変位計121は反射光によって得られる照射点の変位をディジタルデータとしてデータ処理部124に出力する。
【0027】
結晶方位測定部13は、図1に示すように、X線ビーム4aを発生するX線管131、X線ビーム4aが通過するコリメータ132、ワーク2の側面からの回折X線4bを検出するX線検出器133、デルタフレーム134、デルタ駆動部135、ファイ駆動部136、機構制御部137、及びデータ処理部138を有する。
【0028】
結晶方位測定部13は、計算機14から結晶方位の測定を制御する制御信号が入力されると、ファイ駆動部136によって軸φを2方向(あるいは4方向)それぞれに固定して、デルタ駆動部135によってδ駆動のスキャンを行いそれぞれのφの位置での結晶方位傾斜角を求める。これにより結晶方位(法線)のφ軸を基準とするAx方向、及びAx方向と直行する方向への傾斜角が求められる。機構制御部137はφ回転とδ回転のシーケンス制御を行い、データ処理部138は、φ、δの値とX線検出器133の出力から結晶方位(φ軸からの2方向の傾斜角δ0、δ90)を算出し、計算機14に出力する。
【0029】
計算機14は一般的なパーソナルコンピュータであり、ハードウェア構成として、図1で図示しない筺体、電源、バスライン、CPU、メモリ、インタフェース、ディスク、通信部、表示器、キーボード、マウス、プリンタ等を備える。計算機14はソフトウェアの機能ブロックとして、測定制御部141、補正部142、軸方向結晶方位計算部143を有する。ディスクに記憶されているコンピュータプログラムが、メモリに読み込まれて起動されることで、測定制御部141、補正部142及び軸方向結晶方位計算部143は各機能を発揮する。
【0030】
測定制御部141は、回転部11、ノッチ測定部12及び結晶方位測定部13にそれぞれ制御信号を出力することで、測定に関する全てのシーケンス動作を制御する。補正部142は、ノッチ測定部12から入力するノッチ位置情報によって、結晶方位測定部13から入力する測定方位を補正する。軸方向結晶方位計算部143は、結晶方位測定部13から入力する半径方向の結晶方位から、軸方向結晶方位を算出する。
【0031】
図2は、測定対象となるワーク2の一例である。図2では、立法体結晶格子を模式的に四角形で表している。図2において、シリコンの単結晶であるワーク2の軸方向方位はミラー指数(100)で、ノッチ2aは(110)方向に合わせて研磨されている。ここでは、90°毎の半径方向結晶方位(110)4方向のうちの2方向の結晶方位h1及び結晶方位h2を測定し、結晶方位(110)のノッチ2a方位からのずれを求めるとともに、結晶方位h1と結晶方位h2から軸方向結晶方位h0のインゴット軸Axからのずれを計算する。
【0032】
以下、図3乃至図6を参照して本発明の最良の実施形態に係る結晶方位測定装置1の作用について説明する。
【0033】
図3は結晶方位測定装置1における結晶方位の測定の処理を説明するフローチャートである。図3に示される処理の全体は、測定制御部141によって制御される。
【0034】
まず、結晶方位測定装置1は、ノッチ2aを位置決めする(S1)。具体的には、測定制御部141がノッチ測定部12にノッチを位置決めする制御信号を出力する。制御信号を入力したノッチ測定部12では、機構制御部123がレーザ変位計121を直進方向に移動させ、ワーク2の軸Axのほぼ真上に停止させる。レーザ変位計121は、レーザビーム3aをワーク2aに照射し、その反射光を変位として検出し、測定制御部141に出力する。測定制御部141は、レーザ変位計121から出力される変位を一定時間間隔で順次入力しながら回転部11にワーク2を回転させる制御信号を出力し、ワーク2の回転を開始させる。測定制御部141は、レーザ変位計121から入力した変位が前回入力した変位と比較して所定量変化したとき、ノッチ2aにレーザビーム3aが照射されていると判定する。これによって、回転部11にワーク2の回転を停止させる制御信号を出力し、ノッチ2aの位置がワーク2で最も高い位置に位置決めされる。
【0035】
ノッチ2aが位置決めされると、結晶方位測定装置1は、ノッチの形状を測定する(S2)。ここで、ノッチの形状の測定は、ノッチの表面(インゴットの表面)の座標をノッチ2aの大きさに比べて十分細かい間隔で連続して測定することで行われる。具体的には、測定制御部141がノッチ測定部12にノッチ2aを測定する制御信号を出力する。制御信号を入力したノッチ測定部12では、レーザ変位計121を直進させながら細かい間隔で変位を測定してノッチ形状を測定する。
【0036】
図4にノッチ形状の一例を示す。図4において、座標uはレーザ変位計121の直進方向、座標vはレーザ変位計121で測定された変位である。データ処理部124は、レーザ変位計121で得られたノッチ形状からノッチの位置として、円筒に沿ったノッチ幅の中央点(ノッチ位置)Cnの座標u,vを求める。また、データ処理部124は、ノッチ形状のパラメータとして、ノッチ幅wn、ノッチ深さdn、開き角度βn、開き角度の半径方向からの傾き(ノッチの傾き)βc、底半径rfを算出する。このとき、データ処理部124は、ノッチの斜面位置は最小二乗法により直線でフィッティングし、底部位置は最小二乗法により円でフィッティングして求め、フィッティングした線とデータ点との誤差からノッチ面の凹凸の程度を求め基準値を超えていないかの判定も行う。ノッチ測定部12は、測定結果(ノッチ位置Cn、幅wn、深さdn、角度βn、傾きβc、底半径rf、判定結果)を計算機14に出力する。
【0037】
ノッチの形状が測定されると、結晶方位測定装置1は、結晶方位h1を測定する(S3)。具体的には、測定制御部141が結晶方位測定部13に結晶方位h1を測定する制御信号を出力する。制御信号を入力した結晶方位測定部13では、X線管131によってX線ビーム4aを照射し、回折X線4bを検出してワーク2の結晶方位h1を測定する。結晶方位h1は、φ軸からの2方向の傾斜角δ01(Ax方向)、δ901(Ax直交方向)として得られる。
【0038】
その後、結晶方位測定装置1は、半径方向結晶方位δ90’を算出する(S4)。具体的には、結晶方位h1が検出されると、補正部142は、測定制御部141に制御されてノッチ停止誤差を補正する停止誤差角度ωnを求め、停止誤差角度ωnによって補正した半径方向結晶方位δ90’を算出する。
【0039】
図5に半径方向結晶方位を計算する幾何図の一例を示す。補正部142では、まずステップS2で求められたノッチ位置Cn、基準位置Cn0及び既知であるワーク2の半径Rから、ノッチ2aの停止誤差角度ωnを算出する。このとき、基準位置Cn0は予め2つのローラ111,112の2等分線上にノッチ2aが位置するような治具を用いて測定し、メモリで記憶しておく。ノッチ位置Cnと基準位置Cn0との直進方向の差Δuを用いて、停止誤差角度ωnは、式(1)によって求められる。
【0040】
ωn=asin(Δu/R) ・・・(1)
次に、補正部142は、結晶方位h1の測定値δ901を停止誤差角度ωnを用いて補正し、ノッチ基準の半径方向結晶位置(110)δ90’を求める。半径方向結晶位置δ90’は、式(2)によって求められる。
【0041】
δ90’=δ901−ωn ・・・(2)
続いて、結晶方位測定装置1は、ワーク2を90°回転させる(S5)。具体的には、測定制御部141がワーク2を回転させる制御信号を出力する。制御信号を入力した回転部11は、ワーク2をCW方向に90°回転させる。このワーク2の回転は、ローラ111あるいはローラ112を回転させて行うため、すべりやワーク2の直径に誤差があること等により、回転誤差が生じる。ワーク2の回転角Ωは、約90°で未知数である。
【0042】
ワーク2が回転されると、結晶方位測定装置1は、結晶方位h2を測定する(S6)。具体的には、測定制御部141が結晶方位測定部13に結晶方位h2を測定する制御信号を出力する。制御信号を入力した結晶方位測定部13では、X線管131によってX線ビーム4aを照射し、回折X線4bを検出してワーク2の結晶方位h2を測定する。結晶方位h2は、φ軸からの2方向の傾斜角δ02(Ax方向)、δ902(Ax直交方向)として得られる。
【0043】
その後、結晶方位測定装置1は、軸方向結晶方位h0を計算する(S7)。具体的には、結晶方位h2が検出されると、軸方向結晶方位計算部143は、測定制御部141に制御されて結晶方位h1,h2から軸方向結晶方位h0を算出する。このとき、結晶方位h1,h2が互いに90°を成すため、回転角Ωの正確な値を知ることができるので、回転誤差が補正される。
【0044】
図6に、軸方向結晶方位h0の計算幾何図の一例を示す。図6で座標XYZは、ワーク2に固定した座標系で、Z軸は軸Axである。X軸は、結晶方位h1測定時のφ軸である。結晶方位h1と結晶方位h2間の角度を角度r12(=90°)とすると、回転角Ωは、式(3)〜(5)によって求められる。
【0045】
λ1=asin[cos(δ901)・sin(δ01)/√{1−(sin(δ01)・sin(δ901))2}] ・・・(3)
λ2=asin[cos(δ902)・sin(δ02)/√{1−(sin(δ02)・sin(δ902))2}] ・・・(4)
Ω=acos[{cos(r12)−sin(λ1)・sin(λ2)}/{cos(λ1)・cos(λ2)}] ・・・(5)
式(5)は、r12≠90°の場合にも適用できる。
【0046】
回転角Ωとλ1,2が分かれば、結晶方位h1,2のXYZ成分が求められるので、軸方向結晶方位h0のXYZ成分は、式(6)のベクトルの計算で求められる。
【0047】
h0=h1×h2/√{1−(h1・h2)2} ・・・(6)
式(6)で、「×」はベクトル積、「・」は内積である。また、式(6)は、r12≠90°の場合にも適用できる。
【0048】
XYZ座標で軸方向結晶方位h0が求められると、軸方向結晶方位h0は、極座標に変換でき、軸Axを基準とした傾斜角と(例えばY軸からCW方向にとった)傾斜方位(δ,ωδ)として求めることができる。次に、(δ,ωδ−ωn)を計算すると、これは軸Axとノッチを基準とした軸方向結晶方位h0となる。また、(δ,ωδ−δ901)を計算するとこれは軸Axと半径方向結晶方位δ90’を基準としたh0となる。
【0049】
結晶方位測定装置1では、ステップS2で求めたノッチの形状とノッチの形状のパラメータ、ステップS4で求めた半径方向結晶方位δ90’、ステップS7で求めた軸方向結晶方位h0をワーク2のシリアルナンバーと共に表示するともに、ディスクに記憶する。
【0050】
例えば、ノッチの形状や形状のパラメータが所定範囲を超えたときやノッチ面の凹凸が基準値を超えたとき、自動的に不良品と判断して不良品である旨の警報を出力するようにすることもできる。また、ディスクに記憶されたノッチの形状、形状のパラメータ及び結晶方位を過去に遡って接続される表示器に表示させれば、研削機の砥石の状態変化がわかり、研削機のメンテナンスに使用できる。
【0051】
なお、ノッチの形状、形状のパラメータ及び結晶方位は、結晶方位測定装置1のディスクに記憶させる他、通信回線で接続される他の装置に送信してもよい。
【0052】
上述したように、本発明の最良の実施形態に係る結晶方位測定装置1によれば、ノッチを位置決めした後で、ノッチの位置の測定をして補正するので、ノッチ形状誤差等によるノッチ位置決め誤差が補正でき、制度良く半径方向結晶方位を測定することができる。
【0053】
また、結晶方位測定装置1によれば、ノッチの形状を測定しているので、ノッチ位置が正確に求められ、精度よく半径方向結晶方位を測定することができる。また、ノッチの形状を示すパラメータを求めているので、これを研削機(ノッチの研削砥石)のメンテナンス用のデータとして使用でき、メンテナンスが容易となる。
【0054】
さらに、結晶方位測定装置1によれば、側面測定のみで軸方向結晶方位を求めることができる。軸方向結晶方位をインゴット軸Axとノッチを基準に、又はインゴット軸Axと半径方向結晶方位を基準に求めることができる。また、結晶方位h1測定は、位置決め後回転させずに行っているので回転の誤差が無く、結晶方位h2の測定も回転位置決め(Ω)の誤差を補正しているので、回転誤差無く軸方向方位を求めることができる。
【0055】
(第1変形例)
上述した結晶方位測定装置1によれば、結晶方位h1,h2間の角度r12が90°であったが、角度r12が90°でない場合であっても結晶方位を測定することができる。
【0056】
図7は第1変形例に係る結晶方位測定装置において測定するワーク2の一例である。図7で、六角形は斜めから見た立方体結晶格子を模式的に表している。シリコンの単結晶であるワーク2の軸方向方位は、ミラー指数(111)で、ノッチ2aは(110)方向にあわせて研磨している。この場合、60°おきの半径方向結晶方位(211)の6方向のうちの2方向、結晶方位h1,h2を測定する。
【0057】
第1変形例に係る結晶方位測定装置では、r12=60°、回転角Ω=約60°となる点のみが異なり、結晶方位測定装置1と同様に結晶方位h1,h2を測定し、同じ計算でノッチ基準の半径方向結晶方位(110)と軸方向結晶方位h0が求められる。
【0058】
r12が90°ではない第1変形例に係る結晶方位測定装置においても、上述した結晶方位測定装置1と同一の効果が得られる。
【0059】
(第2変形例)
上述した結晶方位測定装置1によれば、同じミラー指数の結晶方位h1,h2を測定したが、第2変形例に係る結晶方位測定装置1によれば、ミラー指数が異なる場合であっても結晶方位を測定することができる。
【0060】
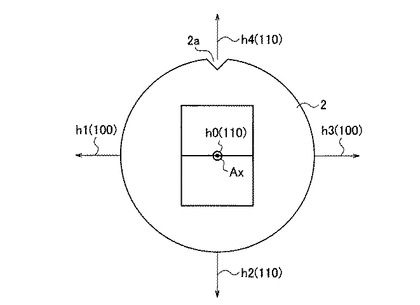
第2変形例に係る結晶方位測定装置によれば、X線管131と検出器133の配置角度2αを結晶方位h1の測定と結晶方位h2の測定とで切り換える機構を追加する。配置角度2αの切り換えは、検出器133かX線管131か、あるいは両方を自動で動かすようにする。図8に、第2変形例に係る結晶方位測定装置において測定するワーク2の一例を示す。図8で、四角形は、斜めから見た立方体結晶格子を模式的に表している。シリコンの単結晶であるワーク2の軸方向方位は、ミラー指数(110)で、ノッチ2aは(110)方向にあわせて研磨している。半径方向結晶方位(100)は、平行な結晶方位h1,h3のみで、軸方向が計算できない。(110)も平行な結晶方位h2,h4のみで、軸方向が計算できない。この場合、半径方向結晶方位として、図8に示す結晶方位h1と結晶方位h2を測定する。結晶方位h1は(100)、結晶方位h2は(110)である。
【0061】
第2変形例に係る結晶方位測定装置によれば、結晶方位h1の測定と結晶方位h2の測定で、X線管131と検出器133の配置角度2αを変える点のみが異なり、結晶方位測定装置1と同様に結晶方位h1,h2を測定し、同じ計算でノッチ基準の半径方向結晶方位(110)と軸方向結晶方位h0が求められる。
【0062】
このように、ミラー指数が異なる面を測定することで、同一面指数の半径方向結晶方位が全て平行となる場合でも、側面測定のみで軸方向結晶方位を求めることができる。また、図8に示すワーク2の場合、ノッチの位置決め後、回転させずにh1測定を行うので、(また、h2測定前の回転誤差は補正されるので)回転誤差が無く軸方向結晶方位を求めることができる。
【0063】
ミラー指数が異なる結晶方位を測定する第2変形例に係る結晶方位測定装置においても、上述した結晶方位測定装置1と同一の効果が得られる。
【0064】
(第3変形例)
上述した結晶方位測定装置1によれば、側面のマークとして、ノッチ2aを利用してワーク2を位置決めして結晶方位を測定したが、ノッチの代わりにオリフラ面を研削したワークであっても結晶方位を測定することができる。
【0065】
第3変形例に係る結晶方位測定装置によれば、ノッチ測定部12でノッチの形状を測定する代わりにオリフラ面の傾斜を測定し、これをωnとする。
【0066】
ノッチの代わりにオリフラ面を用いて結晶方位を測定する第3変形例に係る結晶方位測定装置においても、上述した結晶方位測定装置1と同一の効果が得られる。
【0067】
(第4変形例)
上述した結晶方位測定装置1は、レーザ変位計121を備え、レーザ変位計を用いてノッチの形状を測定しているが、ノッチの形状はレーザ変位計121以外であっても測定することができる。
【0068】
第4変形例に係る結晶方位測定装置は、レーザ変位計121以外でノッチの形状を測定する一例として、インゴットの端面を軸方向からTVカメラで撮影し、画像をディジタルデータに変換してデータ処理部124に取り込む。
【0069】
また、その他ではノッチの形状の測定に光切断法等を用いても良い。光切断法は、ファン状の光を側面からノッチに照射し、ファン面から離れたTVカメラで撮影することで形状を測定するものである。
【0070】
(第5変形例)
上述した結晶方位測定装置1によれば、ノッチの形状測定で、レーザ変位計121を水平方向uに移動させて測定している。このとき、レーザビーム3aに対し、ノッチ斜面が垂直から45°程度傾斜するため、測定する変位に誤差が生じることがあり、開き角度βn及び底半径rfの誤差となる。これらの誤差を防ぐため、第5変形例に係る結晶方位測定装置は、移動方向uを3方向(水平からの傾斜+45°、0°、−45°)切り換えてノッチ形状を3回測定し、測定されたこれらのノッチ形状から開き角度を補正してノッチ形状のパラメータを計算する。
【図面の簡単な説明】
【0071】
【図1】本発明の最良の実施形態に係る結晶方位装置の概念図である。
【図2】本発明の最良の実施形態に係る結晶方位測定装置の測定対象となるワークの一例である。
【図3】本発明の最良の実施形態に係る結晶方位測定装置における結晶方位の測定の処理を説明するフローチャートである。
【図4】本発明の最良の実施形態に係る結晶方位測定装置の測定対象となるワークのノッチ形状の一例である。
【図5】本発明の最良の実施形態に係る結晶方位測定装置で半径方向結晶方位を計算する幾何図の一例である。
【図6】本発明の最良の実施形態に係る結晶方位測定装置の軸方向結晶方位の計算幾何図の一例である。
【図7】本発明の第1変形例に係る結晶方位測定装置の測定対象となるワークの一例である。
【図8】本発明の第2変形例に係る結晶方位測定装置の測定対象となるワークの一例である。
【符号の説明】
【0072】
1…結晶方位測定装置
11…回転部
111,112…ローラ
12…ノッチ測定部(位置決め部)
121…レーザ変位計
122…直進機構
123…機構制御部
124…データ処理部
13…結晶方位測定部
131…X線管
132…コリメータ
133…X線検出器
134…デルタフレーム
135…デルタ駆動部
136…ファイ駆動部
137…機構制御部
138…データ処理部
14…計算機
141…測定制御部
142…補正部
143…軸方向結晶方位計算部
2…ワーク(円筒状結晶)
2a…ノッチ
【特許請求の範囲】
【請求項1】
円筒状結晶をその円筒軸に対し回転させる回転部と、
前記円筒状結晶を回転し、前記円筒状結晶の周側面に設けられたノッチを基準に前記円筒状結晶を位置決めする位置決め部と、
前記円筒状結晶が位置決めされると、回転軸に対する前記ノッチの位置を測定するノッチ測定部と、
前記周側面にX線を照射して半径方向の結晶方位を測定する結晶方位測定部と、
前記結晶方位測定部で測定した結晶方位を前記ノッチ測定手段で測定したノッチの位置で補正して半径方向の結晶方位を求める補正部と、
を備えることを特徴とする結晶方位測定装置。
【請求項2】
前記ノッチ測定部は、前記ノッチの形状を測定することによって、ノッチの位置を求めることを特徴とする請求項1記載の結晶方位測定装置。
【請求項3】
前記ノッチ測定部は、前記ノッチの形状から、前記ノッチの幅、前記ノッチの深さ、前記ノッチの開き角度、前記ノッチの傾き、又は前記ノッチの底半径のうち少なくとも一つを求めることを特徴とする請求項2記載の結晶方位測定装置。
【請求項4】
前記ノッチ測定部は、前記ノッチの形状を測定するレーザ変位計を有することを特徴とする請求項2又は3記載の結晶方位測定装置。
【請求項5】
前記半径方向の結晶方位の平行でない2つを測定するように前記結晶方位測定部と前記回転部を制御する測定制御部と、
測定された2つの結晶方位から、前記円筒軸の方向の結晶方位を計算する軸方向結晶方位計算部と、
を有することを特徴とする請求項1乃至請求項4いずれか記載の結晶方位測定装置。
【請求項6】
前記2つの結晶方位は互いに異なるミラー指数の結晶方位であることを特徴とする請求項5記載の結晶方位測定装置。
【請求項1】
円筒状結晶をその円筒軸に対し回転させる回転部と、
前記円筒状結晶を回転し、前記円筒状結晶の周側面に設けられたノッチを基準に前記円筒状結晶を位置決めする位置決め部と、
前記円筒状結晶が位置決めされると、回転軸に対する前記ノッチの位置を測定するノッチ測定部と、
前記周側面にX線を照射して半径方向の結晶方位を測定する結晶方位測定部と、
前記結晶方位測定部で測定した結晶方位を前記ノッチ測定手段で測定したノッチの位置で補正して半径方向の結晶方位を求める補正部と、
を備えることを特徴とする結晶方位測定装置。
【請求項2】
前記ノッチ測定部は、前記ノッチの形状を測定することによって、ノッチの位置を求めることを特徴とする請求項1記載の結晶方位測定装置。
【請求項3】
前記ノッチ測定部は、前記ノッチの形状から、前記ノッチの幅、前記ノッチの深さ、前記ノッチの開き角度、前記ノッチの傾き、又は前記ノッチの底半径のうち少なくとも一つを求めることを特徴とする請求項2記載の結晶方位測定装置。
【請求項4】
前記ノッチ測定部は、前記ノッチの形状を測定するレーザ変位計を有することを特徴とする請求項2又は3記載の結晶方位測定装置。
【請求項5】
前記半径方向の結晶方位の平行でない2つを測定するように前記結晶方位測定部と前記回転部を制御する測定制御部と、
測定された2つの結晶方位から、前記円筒軸の方向の結晶方位を計算する軸方向結晶方位計算部と、
を有することを特徴とする請求項1乃至請求項4いずれか記載の結晶方位測定装置。
【請求項6】
前記2つの結晶方位は互いに異なるミラー指数の結晶方位であることを特徴とする請求項5記載の結晶方位測定装置。
【図1】


【図2】

【図3】

【図4】

【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2008−180526(P2008−180526A)
【公開日】平成20年8月7日(2008.8.7)
【国際特許分類】
【出願番号】特願2007−12470(P2007−12470)
【出願日】平成19年1月23日(2007.1.23)
【出願人】(391017540)東芝ITコントロールシステム株式会社 (107)
【Fターム(参考)】
【公開日】平成20年8月7日(2008.8.7)
【国際特許分類】
【出願日】平成19年1月23日(2007.1.23)
【出願人】(391017540)東芝ITコントロールシステム株式会社 (107)
【Fターム(参考)】
[ Back to top ]