
内燃機関の制御装置
【課題】ドライバビリティの低下を防ぎつつ、EGR率が上限EGR率を超過することを防止する。
【解決手段】制御装置10は、吸気管28に取り込まれる新気量を調整するスロットルバルブ12と、内燃機関22の排気の一部を吸気管28に戻す還流排気量を調整するEGRバルブ14と、新気及び還流排気が混合された吸気を吸気管28から内燃機関22の燃焼室26に導入する吸気導入量を調整する吸気バルブ16と、を備える。さらに、スロットルバルブ12及びEGRバルブ14の開度を絞る際に、還流排気量の混合率であるEGR率の上限値を超過しないようにスロットルバルブ12を制御するとともに吸気バルブ16の開度を絞るように制御する制御部20を備える。
【解決手段】制御装置10は、吸気管28に取り込まれる新気量を調整するスロットルバルブ12と、内燃機関22の排気の一部を吸気管28に戻す還流排気量を調整するEGRバルブ14と、新気及び還流排気が混合された吸気を吸気管28から内燃機関22の燃焼室26に導入する吸気導入量を調整する吸気バルブ16と、を備える。さらに、スロットルバルブ12及びEGRバルブ14の開度を絞る際に、還流排気量の混合率であるEGR率の上限値を超過しないようにスロットルバルブ12を制御するとともに吸気バルブ16の開度を絞るように制御する制御部20を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は内燃機関の制御装置に関し、特に内燃機関に送り込む新気量や還流排気量を調整可能な制御装置に関する。
【背景技術】
【0002】
内燃機関から排出された排気の一部を吸気側に戻すことにより排気中の大気汚染物質の低減を図る排気再循環(EGR、Exhaust Gas Recirculation)と呼ばれる技術が従来から知られている。新気と排気が混合された吸気を用いることで内燃機関の燃焼室における燃焼温度を抑制させ、これにより、燃焼温度の上昇に伴って増加する窒素酸化物(NOx)等の大気汚染物質の発生を抑えることが可能となる。また、低負荷運転でのポンピングロスを低減することができ、燃費を改善することが可能となる。
【0003】
一方、吸気における還流排気の混合率(以下、これをEGR率と呼ぶ)が過度に高いと失火(ミスファイア)に繋がるおそれがある。失火とは燃焼室において吸気と燃料の混合気の少なくとも一部が未燃焼になる状態を指し、未燃焼の混合気が大気汚染物質を除去する触媒器に送られると触媒と混合気との酸化反応(加熱反応)等により触媒器の過熱に繋がるおそれがある。
【0004】
そこで、失火に至るEGR率の上限値(上限EGR率)よりも低い目標EGR率を設定するとともに、吸気のEGR率が目標EGR率となるように新気量と還流排気量が調整される。例えば燃焼室へ導入される吸気導入量と目標EGR率とに応じて目標新気量と目標還流排気量を求め、これらに応じて吸気管に新気を取り込むスロットルバルブの開度や吸気管への還流排気量を調整するEGRバルブの開度が設定される。
【0005】
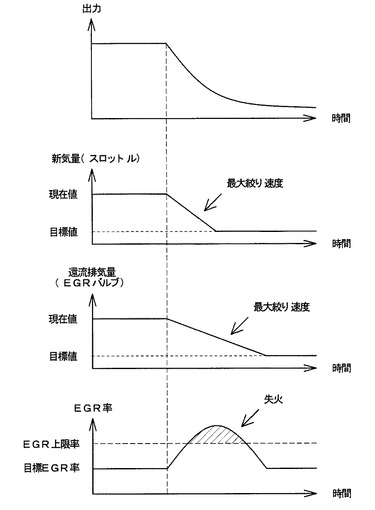
ここで、例えばトルクを急減する旨の出力要求が発せられる等により吸気導入量を急減させる場合があり、吸気導入量の急減に伴ってスロットルバルブ及びEGRバルブの開度を絞る(低減させる)絞り制御を実行する。このとき、機械的な制約や指令信号の遅延等の理由によりEGRバルブの絞り速度がスロットルバルブよりも遅い場合、図8に示すように、スロットルバルブの絞り速度にEGRバルブが追従できなくなり、EGR率が増加して上限EGR率を超過するおそれがある。そこで例えば特許文献1等においては失火に繋がると判定されたときには燃料噴射を中止する燃料カットを行っている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2000−104595号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、燃料カットにより燃料と混合されなかった吸気は燃焼室内において燃焼反応を起こさずにそのまま触媒器に送られる。燃焼反応が行われなかった、つまり酸素を豊富に含む吸気が触媒器に送られた場合、触媒器中の還元剤と酸素が反応して触媒器の温度が上昇する。この温度上昇は未燃焼の混合気との反応時ほどではないにせよ排気との反応時と比較すると顕著なものであり、したがって触媒器の過熱を防止するためには失火に加えて燃料カットも避けることが好ましい。このようなことから、EGR率が上限EGR率を超過したら燃料カットを行うという制御よりもEGR率が上限EGR率を超過しないような制御を行うことが好ましい。
【0008】
そこで、スロットルバルブの絞り操作を遅延または緩やかにする、例えば図9に示すようにスロットルバルブの絞り込みの開始時点を遅延させることによりEGR率の上昇を防ぐことが考えられる。しかし、この手段によると新気の取り込み量が相対的に増加し、これに伴い内燃機関に取り込まれる吸気導入量が増加する。吸気導入量の増加により内燃機関の出力が出力要求よりも増加してしまい、運転者の運転指令に対する応答性(ドライバビリティ)が低下するという別の問題が発生するおそれがある。
【課題を解決するための手段】
【0009】
本発明は内燃機関の制御装置に関する。当該制御装置は、吸気管に取り込まれる新気量を調整するスロットルバルブと、内燃機関の排気の一部を前記吸気管に戻す還流排気量を調整するEGRバルブと、新気及び還流排気が混合された吸気を前記吸気管から前記内燃機関の燃焼室に導入する吸気導入量を調整する吸気バルブと、を備える。また、前記スロットルバルブ及び前記EGRバルブの開度を絞る際に、前記還流排気量の混合率であるEGR率の上限値を超過しないように前記スロットルバルブを制御するとともに前記吸気バルブの開度を絞るように制御する制御部を備える。
【0010】
また、上記発明において、前記制御部は、前記スロットルバルブ及び前記EGRバルブ及び前記吸気バルブの制御に応じて目標新気量、目標還流排気量及び目標吸気導入量に収束するまでの前記新気量、前記還流排気量、前記吸気導入量の時間的な変化を予測することが好適である。この場合において、前記EGR率が上限値を超過すると予測された場合には、前記新気量の減少開始時点を前記基準時より遅延させる又は前記新気量の時間的な減少率を予測における制御より緩やかにするように前記スロットルバルブを制御するとともに、前記予測における制御より前記吸気バルブの開度を絞るように制御することが好適である。
【0011】
また、上記発明において、前記制御部は、前記EGR率が上限値を超過すると予測された場合には、前記還流排気量の減少開始時点を前記基準時より早めるように前記EGRバルブを制御することが好適である。
【発明の効果】
【0012】
本発明によれば、ドライバビリティの低下を防ぎつつ、EGR率が上限EGR率を超過することを防止することが可能となる。
【図面の簡単な説明】
【0013】
【図1】本実施形態に係る内燃機関の制御装置を例示する図である。
【図2】吸気バルブシステムを例示する図である。
【図3】モデル予測制御を説明する図である。
【図4】モデル予測制御を説明する図である。
【図5】制御部による内燃機関の制御フローを説明する図である。
【図6】制御部による内燃機関の制御フローを説明する図である。
【図7】制御部による内燃機関の制御フローを説明する図である。
【図8】従来の内燃機関制御を説明する図である。
【図9】従来の内燃機関制御を説明する図である。
【発明を実施するための形態】
【0014】
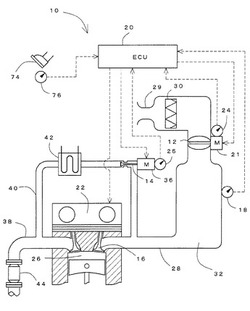
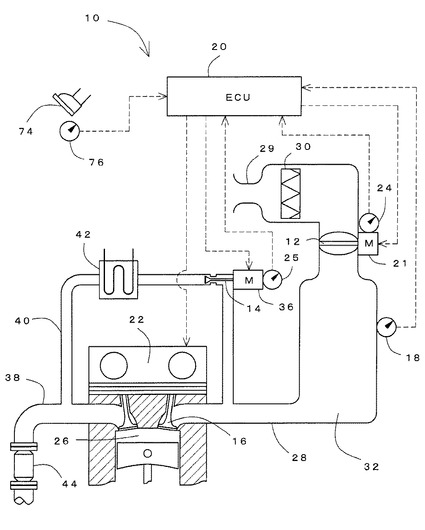
図1に本実施形態に係る内燃機関の制御装置を例示する。制御装置10は、スロットルバルブ12と、EGRバルブ14と、吸気バルブ16と、吸気圧センサ18と、制御部20と、スロットルポジションセンサ24と、EGRバルブポジションセンサ25と、吸気バルブポジションセンサ27(図2参照)を含んで構成される。なお、本実施形態に係る制御装置10は例えば内燃機関22を駆動源とする車両に搭載される。
【0015】
スロットルバルブ12は内燃機関22に供給する新気(車外気)の流量を調整可能な弁体を含んで構成され、例えばバタフライバルブから構成される。スロットルバルブ12はモータ21等の駆動手段によって駆動され、この駆動に応じてスロットルバルブ12の開度が変化する。この開度変化に応じてスロットルバルブ12を通過する新気量が調整される。
【0016】
また、スロットルバルブ12は内燃機関22の燃焼室26に吸気を送り込む吸気管28内に設けることができる。本実施形態においては、吸気管28の空気取り込み口29近傍に設けられたエアクリーナ30とその下流に設けられたサージタンク32との間にスロットルバルブ12が設けられている。
【0017】
また、スロットルポジションセンサ24はスロットルバルブ12の開度を制御部20に送信する。スロットルポジションセンサ24は例えばモータ21の回転数を測定して当該回転数からスロットルバルブ12の開度を算出して制御部20に開度を送信する。
【0018】
EGRバルブ14は内燃機関22から排出された排気の一部を吸気側に還流する還流排気量を調整可能な弁体を含んで構成され、例えばニードルバルブから構成される。EGRバルブ14はモータ36等の駆動手段によって駆動され、この駆動に応じてEGRバルブ14の開度が変化する。この開度変化に応じてEGRバルブ14を通過する還流排気量が調整される。
【0019】
また、EGRバルブ14は排気還流管40内に設けることができる。例えば本実施形態では、排気還流管40を流れる還流排気を冷却するEGRクーラー42より下流側(吸気管側)にEGRバルブ14が設けられている。
【0020】
また、排気還流管40は排気管38と吸気管28とを結んでいる。本実施形態では排気還流管40は排気管38の部分のうち、排気中の大気汚染物質を除去する触媒器44よりも上流に接続されるとともに吸気管28のサージタンク32よりも下流に接続されている。
【0021】
また、EGRバルブポジションセンサ25はEGRバルブ14の開度を制御部20に送信する。EGRバルブポジションセンサ25は例えばモータ36の回転数を測定して当該回転数からEGRバルブ14の開度を算出して制御部20に開度を送信する。
【0022】
吸気圧センサ18は、サージタンク32内の吸気圧を計測して制御部20に送信可能なセンサを含んで構成されている。吸気圧センサ18は例えば半導体式圧力センサから構成することができる。また、本実施形態にでは吸気圧センサ18は絶対真空を0[kPa]とした絶対圧を電気信号に変換して制御部20に圧力信号を送信可能となっている。
【0023】
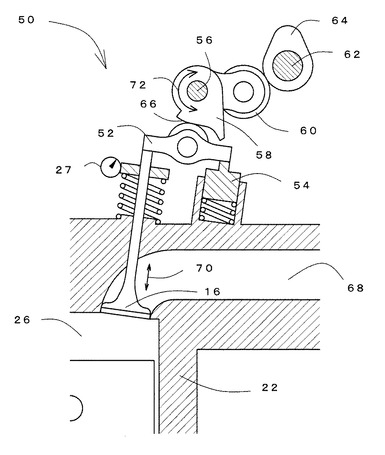
吸気バルブ16は、スロットルバルブ12を介して送られた新気及びEGRバルブ14を介して送られた還流排気が混合された吸気を内燃機関22の燃焼室26へ導入する際の吸気導入量を調整可能な弁体を含んで構成されている。吸気バルブ16の吸気導入量の調整手段として種々の手段が挙げられるが、例えば図2に示すようなリフト量可変の吸気バルブシステム50が用いられる。
【0024】
吸気バルブシステム50は、吸気バルブ16と、ロッカーアーム52と、ラッシュアジャスター54とを含んで構成される。さらに、コントロールシャフト56に支持された揺動アーム58及びローラーアーム60と、カムシャフト62に支持されたカム64を含んで構成されている。さらに吸気バルブシステム50は、吸気バルブ16のリフト量(進退量)を計測する吸気バルブポジションセンサ27を備えている。
【0025】
図示しないタイミングチェーンによってカムシャフト62が回転し、これに伴ってカム64が回転する。回転に伴ってカム64の突出部がローラーアーム60を押すことでローラーアーム60及び揺動アーム58がコントロールシャフト56を回転軸にして回動する。さらに揺動アーム58の回動に伴い揺動アーム58のカム面66がロッカーアーム52を押すことで吸気バルブ16とラッシュアジャスター54が直線方向に移動する。吸気バルブ16の移動に伴って内燃機関22の吸気ポート68が燃焼室26に対して開放され、吸気ポート68から燃焼室26に吸気が導入される。
【0026】
吸気バルブ16の進退量または移動量(図2にて矢印70で示す)はリフト量と呼ばれ、吸気バルブシステム50はこのリフト量を変更可能に構成されている。すなわち、揺動アーム58は図示しないアクチュエータによってコントロールシャフト56に対して回動可能となっている。すなわち、揺動アーム58はコントロールシャフト56に対する初期位置(あるいはローラーアーム60に対する開き角)を調整可能となっている。この調整可能な回動範囲を矢印72で示す。揺動アーム58の初期位置が変化することでロッカーアーム52に当接するカム面66の当接区間が変化する。
【0027】
カム面66は揺動アーム58の回転軸(つまりコントロールシャフト56)に対して非同心円の形状をしており、回転軸からの距離が当接区間によって異なるように形成されている。この様な形状を採ることにより、カム面66の当接区間の変更に伴って回動時にカム面66がロッカーアーム52を押す距離、言い換えるとロッカーアーム52の進退距離が変化し、これに伴って吸気バルブ16のリフト量が変化する。リフト量が変化することによって燃焼室26への吸気導入量が変化する。例えばリフト量が増加すればその分吸気バルブ16が吸気ポート68を開放する時間が長くなり、これに伴って燃焼室26への吸気導入量が増加する。
【0028】
図1に戻り、制御部20は情報を演算するための演算処理部や情報を記憶するための記憶部を備えている。演算処理部は吸気圧センサ18やスロットルポジションセンサ24、EGRバルブポジションセンサ25、吸気バルブポジションセンサ27等の計測機器から送られる情報を受け入れて演算処理し得るともに、スロットルバルブ12用のモータ21やEGRバルブ14用のモータ36、さらには吸気バルブ16のバルブシステム50等の周辺機器に対して開度指令を送信し得る機器から構成される。例えば制御部20はマイクロコンピュータを含んで構成される。このマイクロコンピュータは例えば車両に搭載される電子制御ユニット(ECU)から構成することが可能である。
【0029】
また、記憶部には新気量に対応するスロットルバルブ12の開度、還流排気量に対応するEGRバルブ14の開度、吸気導入量に対応する吸気バルブ16のリフト量等が関数またはマップ(テーブル、表)として記憶されている。さらに記憶部には内燃機関に対する駆動モード(エコモード、パワーモード等)に対応する空燃比及び目標EGR率や、後述する内燃機関の出力制御を実行する上での数式等が記憶されている。記憶部はこれらの情報を記憶可能な機器であればよく、例えばROMやRAM、EPROM、ハードディスク装置等の1つまたは複数の組み合わせから構成することができる。
【0030】
次に、制御部20による内燃機関22の出力制御について説明する。制御部20はアクセルペダル74の踏み込み量を検知するアクセルペダルポジションセンサ76から送信されるアクセルペダルの踏み込み量の変化を検知してこの変化に応じた内燃機関22の出力調整を行う。具体的には、スロットルバルブ12、EGRバルブ14の開度を調整することによって各バルブを通過する新気量、還流排気量を調整するとともに、吸気バルブ16の開度(リフト量)を調整することで新気と還流排気が混合された吸気を内燃機関22に取り込む吸気導入量を調整する。内燃機関22への吸気導入量が調整されることで内燃機関22の出力が制御される。
【0031】
ここで、制御部20はスロットルバルブ12、EGRバルブ14、吸気バルブ16に対する開度調整に際して、モデル予測制御を行うことによりその操作量を求める。モデル予測制御では操作量(入力)と、操作量によって変化する制御量(出力)との関係を表すモデル式(ダイナミクス)を立て、このモデル式に基づいて現在時から見た未来の制御量を予測し、この予測結果から実際の操作量を求める。
【0032】
現時刻をtとし、操作量を入力するステップを制御ステップとし、Npを1以上の整数とすると、現時刻tからt+Np−1の各制御ステップにそれぞれ操作量を入力したときの予測区間[t+1,t+Np]における制御量の予測値を求める。ここで、制御量の予測値を求める際には、当該予測値を設定値(目標値)にできるだけ近づけるように操作量を定める。例えば制御ステップt+Npにおける制御量の予測値と設定値が一致するように操作量を定める。
【0033】
制御量の予測値と設定値とをできるだけ近づけるための手法として、例えば参照軌道と評価関数を用いる。現時刻tにおける制御量y(t)を始点として予測区間[t+1,t+Np]内で制御量が設定値rに徐々に近づく理想的な応答として参照軌道yR(t+j)を設定する。参照軌道は制御の速応性とロバスト性(安定性)との両面を考慮して設定され、例えばむだ時間と一次遅れを考慮した増加率や減少率に基づき現在値から設定値に漸近するような曲線や直線が参照軌道として設定される。参照軌道が設定されると、予測区間[t+1,t+Np]において制御量の予測値yP(t+j)の軌道を参照軌道にできるだけ近づけるように操作量up(t+j)を定める。ここで、制御量の予測値と参照軌道の近さ、及び操作量の妥当性を測る指標として、例えば下記数式1のような評価関数Jを用いる。
【0034】
【数1】

【0035】
または下記数式2のように評価関数Jの表現形式をより簡明にしてもよい。
【0036】
【数2】
【0037】
ここで、Q、Rはともに荷重(重み付け)行列を表す。数式1の第1式及び数式2の第1項は制御量の予測値yPと参照軌道yRとの差を表し、第2項は操作変数uPの変化を表す。評価関数Jの値が小さいほど適切な操作であると規定すると、第1式の第1項は制御量の予測値と設定値とを近づける効果を持ち、第2項は操作量の急激な変動を抑制する効果を持つ。制御部20は種々の操作量及びこの操作量によって得られる制御量の予測値を評価関数に入力して評価関数Jの値を得る。そして入力した操作量及び制御量の予測値のうち評価関数Jの値が最小となった操作量を実際の操作量として用いる。
【0038】
評価関数Jの値を最小にする操作量を求める手段は種々挙げられるが、例えば一般的な二次計画問題の解法を適用することができる。例えば数式2に対して操作量Uに関する勾配∇uJを求める。当該勾配∇uJが0となるときの操作量が評価関数Jの値を最小値にする操作量となる。
【0039】
また、評価関数Jに種々の操作量及び制御量の予測値を入力するに当たり、種々の制約条件を考慮する。例えばEGRバルブ14、スロットルバルブ12、吸気バルブ16の各バルブを通過する流体の流量変化量を操作量とした場合を考える。バルブの機械的な構造等により、1制御ステップあたりの各バルブの開閉速度には上限や下限があり、したがって1制御ステップ当たりの操作変化量にも上限値や下限値が存在する。例えばバタフライバルブはモータを1/4回転させると開度が全開(100%)から全閉(0%)に絞られる。またスクリューバルブはあらかじめ定められたストローク分(例えば10回転)モータを回転させると開度が全開から全閉に絞られる。このことから、バタフライバルブを通過する流体の流量変化の最大値Δuvmaxは、スクリューバルブを通過する流体の流量変化の最大値Δusmaxより一般的には早くなる(Δuvmax>Δusmax)。
【0040】
また、制約条件は操作量のみならず制御量にも定められる場合がある。例えば管内を通過することのできる最大流量等がこれに該当する。さらに、実際の制御系に即した制約条件が加えられる。例えば予測区間において吸気のEGR率がEGR上限率を超過してはならない等の制約が考慮される。ここで、例えばEGR上限率は当該EGR率を超過した場合に失火が生じるおそれの大きい任意の数値が設定される。このようにバルブの構造等によって定まる制約条件をモデル式に加えてこれらの制約条件を満たすような予測値を入力する。制約条件を考慮した評価関数は一般的には下記数式3のように表される。
【0041】
【数3】
【0042】
ここで、各パラメータのアンダーバー(_)やアッパーバー( ̄)はそれぞれ下限値と上限値を表す。制御部20は制約条件を満足する範囲内において評価関数を最小にする操作量を求めるとともにこの操作量に基づく制御量の予測値を算出する。制御量の予測値の算出は所定の制御ステップ、例えば予測区間の最終ステップt+Npまで行う。予測区間において制御量の予測値が求められると、現時刻tにおける操作量up(t)を各バルブの操作量に反映させる。さらに制御ステップがひとつ進み、現時刻t+1において予測区間[t+2,t+Np+1]における制御量の予測値を求め、t+2における予測値yp(t+2)を与える操作量up(t+1)を現時刻における操作量として各バルブの操作量に反映させる。以下制御ステップが一つ進むたびにこれを繰り返す。
【0043】
なお、制約条件が課せられることに伴い、評価関数に入力する解を得られない場合がある。例えば制約条件を破らなければ予測区間内に制御量の予測値を設定値に収束させることができない場合などがこれに該当する。この場合においては制約条件を緩和する、または予測区間を延長するなどの緩和策を実行し、解を得られるようにする。
【0044】
上述したモデル予測制御を本実施形態に即して説明する。例えば図3のように内燃機関22の出力を急減させるような要求があった場合を考える。まず制御部20はモデル予測制御を行うに当たり制御量の現在値を取得する。具体的にはスロットルポジションセンサ24、EGRバルブポジションセンサ25、吸気バルブポジションセンサ27から各バルブの開度を取得する。さらにこれらの開度から各バルブを通過する新気量、還流排気量、吸気量を算出する。これらの値が制御量の現在値となる。
【0045】
さらに制御部20は出力要求に応じた目標吸気導入量、目標新気量、目標還流排気量を求める。例えば制御部20は内燃機関22に対する出力要求をアクセルポジションセンサ76から取得するとともに、内燃機関22の回転数(機関回転数)を取得する。さらに出力要求と回転数とに基づいて内燃機関22の燃焼室26に送り込む目標吸気導入量を決定する。この決定に当たっては出力と回転数に対する吸気導入量が定められたマップ(テーブル、表)や関数に基づいて行ってもよい。
【0046】
さらに制御部20は目標EGR率を取得する。目標EGR率は車両の走行モードによって異なる場合があり、例えば燃費向上を優先するエコモードや加速性能を優先するパワーモード等で目標EGR率が異なる。そこで制御部20は車両の運転者によって選択された走行モードに基づいてこれに対応する目標EGR率を取得する。さらに制御部20は目標吸気導入量と目標EGR率に基づいた目標還流排気量を決定するとともに目標新気量を決定する。これらの値が制御量の目標値となる。
【0047】
さらに制御部20は新気量、還流排気量、吸気量に対する参照軌道を作成する。参照軌道は現在値及び目標値及び参照軌道を作成する際の変化率を定めた条件式(例えば上述したようなむだ時間+一次遅れ系の基礎式)に基づいて作成される。図3では太い破線で示すように現在値から目標値までそれぞれの流量が単調減少するような軌道を参照軌道とする。
【0048】
次に制御部20は新気量、還流排気量、吸気量に対する制約条件を記憶部から呼び出す。具体的には各バルブを通過する流体の流量変化量の上限値及び下限値、EGR上限率、予測値による出力と要求出力との差異についての許容範囲(例えば出力要求値の±5%)を制約条件として記憶部から呼び出す。
【0049】
さらに制御部20はモデル予測制御を含む各バルブの制御を実行する。なお、本実施形態では演算負荷を軽減する目的で最初からEGRバルブ14(還流排気量)、スロットルバルブ12(新気量)、吸気バルブ16(吸気導入量)の3者に対してモデル予測制御を行わずに、予測制御の初期においてはモデル予測制御の対象となるバルブをEGRバルブ14のみとする。一方でスロットルバルブ12及び吸気バルブ16についてはモデル予測制御によらずに内燃機関22に対する出力要求や内燃機関22の回転数等に基づいて予め定められた最適開度や最適リフト量が適用される。そしてEGRバルブ14のみを対象とするモデル予測制御において制約条件を満足する解を得られない場合にはスロットルバルブ12や吸気バルブ16をモデル予測制御の対象バルブとして漸次追加する。
【0050】
例えばスロットルバルブ12について、新気量に対する参照軌道における制御量を予測区間における制御量として仮設定する。同様に吸気バルブ16について、吸気導入量に対する参照軌道における制御量を予測区間における制御量として仮設定する。さらにEGRバルブ14について、還流排気量の予測値をモデル予測制御によって求める。このとき、還流排気量の予測値を求める過程で制約条件を満足する予測値が得られない場合がある。例えば上述した制約条件に即して説明すると、図3に示すように還流排気量の減少率の上限値が還流排気量の参照軌道における減少率を下回り、その結果、制約を考慮した還流排気量の減少率は参照軌道における減少率よりも緩やかなものとなる。その一方で新気量の減少率は参照軌道に沿っている。このような違いから、新気と還流排気との混合気である吸気のEGR率が徐々に増加してEGR上限率を超過してしまう(制約を満足しない)場合がある。
【0051】
そこで制御部20はスロットルバルブ12をモデル予測制御の対象として追加する。つまり予測区間における新気量を参照軌道によるものから修正することでEGRバルブ14に関するモデル予測制御の解を得られるようにする。例えば図3に示すように新気量の減少開始時点を参照軌道の減少開始時点(t+1)よりも遅延させる。図3に示す例では基準時t+1から2制御ステップ分遅延させる。または図4に示すように減少開始時点は変更させずに新気量の時間的な減少率を所定割合で緩和する。このようにすることでEGR上限率の超過を防止できる。
【0052】
一方、新気量の予測値を修正(減少開始時点の遅延または減少率の緩和)することによって新気量が相対的に増加する。このとき、新気量の修正前後で吸気導入量を変えないとすると、新気量修正後において燃焼室26の吸気導入量が相対的に増加する。その結果、内燃機関22の出力が要求出力より増加してしまい、予測値に基づく出力と要求出力との差異が許容範囲を超過して制約条件を満たさない場合がある。
【0053】
そこで制御部20は吸気バルブ16をモデル予測制御の対象としてさらに追加する。つまり予測区間における吸気導入量を参照軌道によるものから修正することでEGRバルブ14及びスロットルバルブ12に関するモデル予測制御の解を得られるようにする。例えば吸気導入量の時間的な減少率を一時的に増加させる、つまり、新気量の修正前よりも吸気導入量を絞る。例えば図3、4の最下段に示すように一時的に参照軌道よりも吸気導入量を絞る。このようにすることで予測値による出力と要求出力との差異を許容範囲内に抑えることができる。
【0054】
以上のように、還流排気量(EGRバルブ14)単独でのモデル予測制御において制約条件を満足する予測値が得られない場合には、新気量(スロットルバルブ12)及び吸気導入量(吸気バルブ16)の予測値を参照軌道によるものから修正することで、いずれの制約にも反しない形で各バルブの予測区間における最適解を求めることができる。
【0055】
最適解が求められると、制御部20は予測区間における流体の変化量(操作量)の予測値のうち、現在時の操作量にあたる制御ステップtの新気量、還流排気量、吸気導入量の変化量を取得する。さらにこれらの流量を上述したマップにより各バルブの最適な開度に変換する。制御部20は変換された開度を現在時の指令値として各バルブに指令する。
【0056】
また、上述の実施形態に加えて、EGRバルブ14の絞り開始時点を繰り上げるような修正を行ってもよい。例えば参照軌道におけるEGRバルブ14の絞り開始時点が制御ステップt+1よりも後である(例えばt+3)ような場合には、それよりもEGRバルブ14の絞り開始時点を早めてEGR率の上昇を抑制するようにしてもよい。
【0057】
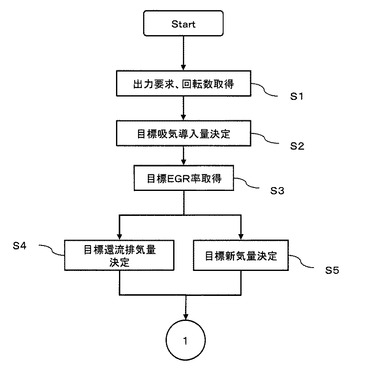
以上説明したモデル予測制御を含む制御部20による内燃機関22の制御フローを図5、6を用いて説明する。制御部20は内燃機関22に対する出力要求を取得するとともに、内燃機関22の回転数(機関回転数)を取得する(S1)。さらに出力要求と回転数とに基づいて内燃機関22の燃焼室26に送り込む目標吸気導入量を決定する(S2)。この決定に当たっては出力と回転数に対する吸気導入量が定められたマップ(テーブル、表)や関数に基づいて行ってもよい。さらに目標吸気導入量に合わせて燃焼室に導入する燃料噴射量を決定してもよい。
【0058】
さらに制御部20は目標EGR率を取得する(S3)。目標EGR率は車両の走行モードによって異なる場合があり、例えば燃費向上を優先するエコモードや加速性能を優先するパワーモード等で目標EGR率が異なる。そこで制御部20は車両の運転者によって選択された走行モードに基づいてこれに対応する目標EGR率を取得する。さらに制御部20は目標吸気導入量と目標EGR率に基づいた目標還流排気量を決定する(S4)とともに目標新気量を決定する(S5)。
【0059】
さらに制御部20はモデル予測制御を実行する。まず制御部20はEGRバルブ14にのみモデル予測制御を実行する(S7)。すなわち、還流排気量に関するモデル式、評価関数及び制約条件(還流排気量及びその変化量の上限値及び下限値に関する制約条件、EGR上限率、要求出力と予測出力との許容乖離割合等)を記憶部から呼び出すとともに、予測区間における新気量(スロットルバルブ12)及び吸気導入量(吸気バルブ16)の値を参照軌道の値に設定してEGRバルブ14に対するモデル予測制御を行う。この場合において制約に反することなく還流排気量(EGRバルブ14)が予測期間内に目標還流排気量に到達できるか、つまり解が存在するか否かを予測制御によって判定する(S8)。解が存在するのであれば制御部20は評価関数Jを用いて最適解を求めるとともに制御ステップtにおける最適解を現在時のEGRバルブ14に適用する(S9)。またこのとき、スロットルバルブ12及び吸気バルブ16については内燃機関22に対する出力要求や内燃機関22の回転数等に基づいて予め定められた最適開度や最適リフト量が適用される。
【0060】
ステップS8において解が存在しない場合は新気量(スロットルバルブ12)をモデル予測制御の対象として追加する。すなわち新気量に関するモデル式、評価関数、制約条件(新気量及びその変化量の上限値及び下限値)を記憶部から呼び出すとともに、EGRバルブ14及びスロットルバルブ12に対してモデル予測制御を実行する(S10)。さらに制御部20は解の有無(制約に反することなく予測期間内に目標還流排気量及び目標新気量に到達できるか否か)について判定する(S11)。解が存在するのであれば制御部20は評価関数Jを用いて最適解を求めるとともに制御ステップtの最適解を現在時のEGRバルブ14及びスロットルバルブ12に対して適用する(S12)。またこのとき、吸気バルブ16については上述した最適リフト量が適用される。
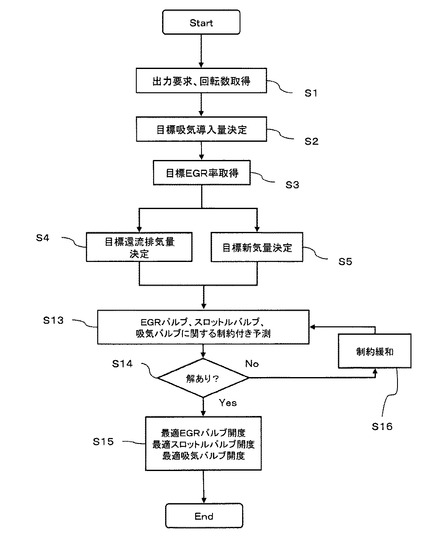
【0061】
ステップS11において解が存在しない場合は吸気導入量(吸気バルブ16)をモデル予測制御の対象として追加する。すなわち吸気導入量に関するモデル式、評価関数、制約条件(吸気導入量及びその変化量の上限値及び下限値)を記憶部から呼び出すとともに、EGRバルブ14、スロットルバルブ12、吸気バルブ16の3者に対してモデル予測制御を実行する(S13)。さらに制御部20は解の有無について判定し(S14)、解が存在するのであれば評価関数Jを用いて最適解を求めるとともに制御ステップtの最適解を現在時のEGRバルブ14、スロットルバルブ12、吸気バルブ16に対して適用する(S15)。また、解が存在しない場合はいずれかの制約を緩和させて、例えば出力要求を緩和させて再度予測制御を行う(S16)。
【0062】
なお、上述の実施形態においてはモデル予測制御の対象を最初はEGRバルブ14のみとし、解が得られない場合に漸次スロットルバルブ12、吸気バルブ16と対象を拡大していったが、この形態に限られない。例えば制御部20の演算能力に余裕がある場合等は図7に示すようにステップS6〜ステップS12までを省略して最初から3者に対してモデル予測制御を実行してもよい。
【0063】
次に、予測値や制約を考慮するうえで必要となる、各バルブ、流量、EGR率に対するモデル式を説明する。まず、内燃機関22に対する出力であるトルクτは下記数式4のように表すことができる。
【0064】
【数4】
【0065】
ここで、k1、k2は係数(以下、kiはいずれも係数とする)、Pmは吸気管圧、Peは排気集合部圧、Hfは低位発熱量(発熱量から潜熱を除いたもの)、αは空燃比(吸気/燃料)、Mcは吸気導入量(吸気バルブ16を通過する新気+還元排気の全量)を表している。
【0066】
また、吸気導入量Mcは下記数式5のように表すことができる。
【0067】
【数5】
【0068】
ここで、uvlは吸気バルブ16のリフト量、ωは内燃機関22の回転数(機関回転数)であって、f(uvl,ω)はこれらの値を変数とする関数(非線形関数)を表している。さらに、Mbackは吸気バルブ16と排気バルブのオーバーラップ時における排気の逆流量を表している。また、数式5の差分を求めることで1制御ステップ当たりの吸入導入量Mcの変化量δMcを求めることができる。
【0069】
また、スロットルバルブ12における新気量Mtは下記数式6のように表すことができる。
【0070】
【数6】
【0071】
ここで、utはスロットルバルブ開度を表し、At(ut)はスロットルバルブ開度utをパラメータとするスロットルバルブの有効開口面積の関数を表している。また、Poは大気圧、Toは大気温を表している。また、Ψ(Pm,Po,Toは)吸気管圧、大気圧、大気温をパラメータとするノズル式を表している。また、数式6の差分を求めることで1制御ステップ当たりの新気量Mtの変化量δMtを求めることができる。
【0072】
また、EGRバルブ14における還流排気量Megrは下記数式7のように表すことができる。
【0073】
【数7】
【0074】
ここで、uegrはEGRバルブ14の開度を表し、Aegr(uegr)はEGRバルブ14の開度uegrをパラメータとするEGRバルブ14の有効開口面積の関数を表している。また、PegrはEGRバルブ14の上流圧、TegrはEGRバルブ14の上流ガス温度を表し、Ψ(Pm,Pegr,Tegr)は吸気管圧、EGRバルブ14の上流圧、EGRバルブ14の上流ガス温度をパラメータとするノズル式を表している。また、数式7の差分を求めることで1制御ステップ当たりの還流排気量Megrの変化量δMegrを求めることができる。
【0075】
さらに、上記数式4−7における吸気管圧Pmは下記数式8のように表すことができる。
【0076】
【数8】
【0077】
ここで、tは現在時刻、hはサンプル時間(1制御ステップ)、Rはガス定数、Tmは吸気温度、Vmは吸気管28の容積を表している。
【0078】
さらに還流排気量に関して、EGRバルブ14から吸気バルブ16までの還元排気量のモデル式(ダイナミクス)は下記数式9にように表すことができる。
【0079】
【数9】
【0080】
ここで、Mcyregrは吸気バルブ16を通過する還流排気量、d(t)はむだ時間(入力から出力が応答し始めるまでに要する時間)、T(t)はダイナミクスの時定数(応答し始めてからの変化の割合)を表している。
【0081】
また、EGR率βegrは下記数式10のように表すことができる。
【0082】
【数10】
【符号の説明】
【0083】
10 制御装置、12 スロットルバルブ、14 EGRバルブ、16 吸気バルブ、18 吸気圧センサ、20 制御部、21 スロットルバルブ用モータ、22 内燃機関、24 スロットルポジションセンサ、25 EGRバルブポジションセンサ、26 燃焼室、27 吸気バルブポジションセンサ、28 吸気管、29 取り込み口、30 エアクリーナ、32 サージタンク、36 EGRバルブ用モータ、38 排気管、40 排気還流管、42 EGRクーラー、44 触媒器、50 吸気バルブシステム、52 ロッカーアーム、54 ラッシュアジャスター、56 コントロールシャフト、58 揺動アーム、60 ローラーアーム、62 カムシャフト、64 カム、66 カム面、68 吸気ポート。
【技術分野】
【0001】
本発明は内燃機関の制御装置に関し、特に内燃機関に送り込む新気量や還流排気量を調整可能な制御装置に関する。
【背景技術】
【0002】
内燃機関から排出された排気の一部を吸気側に戻すことにより排気中の大気汚染物質の低減を図る排気再循環(EGR、Exhaust Gas Recirculation)と呼ばれる技術が従来から知られている。新気と排気が混合された吸気を用いることで内燃機関の燃焼室における燃焼温度を抑制させ、これにより、燃焼温度の上昇に伴って増加する窒素酸化物(NOx)等の大気汚染物質の発生を抑えることが可能となる。また、低負荷運転でのポンピングロスを低減することができ、燃費を改善することが可能となる。
【0003】
一方、吸気における還流排気の混合率(以下、これをEGR率と呼ぶ)が過度に高いと失火(ミスファイア)に繋がるおそれがある。失火とは燃焼室において吸気と燃料の混合気の少なくとも一部が未燃焼になる状態を指し、未燃焼の混合気が大気汚染物質を除去する触媒器に送られると触媒と混合気との酸化反応(加熱反応)等により触媒器の過熱に繋がるおそれがある。
【0004】
そこで、失火に至るEGR率の上限値(上限EGR率)よりも低い目標EGR率を設定するとともに、吸気のEGR率が目標EGR率となるように新気量と還流排気量が調整される。例えば燃焼室へ導入される吸気導入量と目標EGR率とに応じて目標新気量と目標還流排気量を求め、これらに応じて吸気管に新気を取り込むスロットルバルブの開度や吸気管への還流排気量を調整するEGRバルブの開度が設定される。
【0005】
ここで、例えばトルクを急減する旨の出力要求が発せられる等により吸気導入量を急減させる場合があり、吸気導入量の急減に伴ってスロットルバルブ及びEGRバルブの開度を絞る(低減させる)絞り制御を実行する。このとき、機械的な制約や指令信号の遅延等の理由によりEGRバルブの絞り速度がスロットルバルブよりも遅い場合、図8に示すように、スロットルバルブの絞り速度にEGRバルブが追従できなくなり、EGR率が増加して上限EGR率を超過するおそれがある。そこで例えば特許文献1等においては失火に繋がると判定されたときには燃料噴射を中止する燃料カットを行っている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2000−104595号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、燃料カットにより燃料と混合されなかった吸気は燃焼室内において燃焼反応を起こさずにそのまま触媒器に送られる。燃焼反応が行われなかった、つまり酸素を豊富に含む吸気が触媒器に送られた場合、触媒器中の還元剤と酸素が反応して触媒器の温度が上昇する。この温度上昇は未燃焼の混合気との反応時ほどではないにせよ排気との反応時と比較すると顕著なものであり、したがって触媒器の過熱を防止するためには失火に加えて燃料カットも避けることが好ましい。このようなことから、EGR率が上限EGR率を超過したら燃料カットを行うという制御よりもEGR率が上限EGR率を超過しないような制御を行うことが好ましい。
【0008】
そこで、スロットルバルブの絞り操作を遅延または緩やかにする、例えば図9に示すようにスロットルバルブの絞り込みの開始時点を遅延させることによりEGR率の上昇を防ぐことが考えられる。しかし、この手段によると新気の取り込み量が相対的に増加し、これに伴い内燃機関に取り込まれる吸気導入量が増加する。吸気導入量の増加により内燃機関の出力が出力要求よりも増加してしまい、運転者の運転指令に対する応答性(ドライバビリティ)が低下するという別の問題が発生するおそれがある。
【課題を解決するための手段】
【0009】
本発明は内燃機関の制御装置に関する。当該制御装置は、吸気管に取り込まれる新気量を調整するスロットルバルブと、内燃機関の排気の一部を前記吸気管に戻す還流排気量を調整するEGRバルブと、新気及び還流排気が混合された吸気を前記吸気管から前記内燃機関の燃焼室に導入する吸気導入量を調整する吸気バルブと、を備える。また、前記スロットルバルブ及び前記EGRバルブの開度を絞る際に、前記還流排気量の混合率であるEGR率の上限値を超過しないように前記スロットルバルブを制御するとともに前記吸気バルブの開度を絞るように制御する制御部を備える。
【0010】
また、上記発明において、前記制御部は、前記スロットルバルブ及び前記EGRバルブ及び前記吸気バルブの制御に応じて目標新気量、目標還流排気量及び目標吸気導入量に収束するまでの前記新気量、前記還流排気量、前記吸気導入量の時間的な変化を予測することが好適である。この場合において、前記EGR率が上限値を超過すると予測された場合には、前記新気量の減少開始時点を前記基準時より遅延させる又は前記新気量の時間的な減少率を予測における制御より緩やかにするように前記スロットルバルブを制御するとともに、前記予測における制御より前記吸気バルブの開度を絞るように制御することが好適である。
【0011】
また、上記発明において、前記制御部は、前記EGR率が上限値を超過すると予測された場合には、前記還流排気量の減少開始時点を前記基準時より早めるように前記EGRバルブを制御することが好適である。
【発明の効果】
【0012】
本発明によれば、ドライバビリティの低下を防ぎつつ、EGR率が上限EGR率を超過することを防止することが可能となる。
【図面の簡単な説明】
【0013】
【図1】本実施形態に係る内燃機関の制御装置を例示する図である。
【図2】吸気バルブシステムを例示する図である。
【図3】モデル予測制御を説明する図である。
【図4】モデル予測制御を説明する図である。
【図5】制御部による内燃機関の制御フローを説明する図である。
【図6】制御部による内燃機関の制御フローを説明する図である。
【図7】制御部による内燃機関の制御フローを説明する図である。
【図8】従来の内燃機関制御を説明する図である。
【図9】従来の内燃機関制御を説明する図である。
【発明を実施するための形態】
【0014】
図1に本実施形態に係る内燃機関の制御装置を例示する。制御装置10は、スロットルバルブ12と、EGRバルブ14と、吸気バルブ16と、吸気圧センサ18と、制御部20と、スロットルポジションセンサ24と、EGRバルブポジションセンサ25と、吸気バルブポジションセンサ27(図2参照)を含んで構成される。なお、本実施形態に係る制御装置10は例えば内燃機関22を駆動源とする車両に搭載される。
【0015】
スロットルバルブ12は内燃機関22に供給する新気(車外気)の流量を調整可能な弁体を含んで構成され、例えばバタフライバルブから構成される。スロットルバルブ12はモータ21等の駆動手段によって駆動され、この駆動に応じてスロットルバルブ12の開度が変化する。この開度変化に応じてスロットルバルブ12を通過する新気量が調整される。
【0016】
また、スロットルバルブ12は内燃機関22の燃焼室26に吸気を送り込む吸気管28内に設けることができる。本実施形態においては、吸気管28の空気取り込み口29近傍に設けられたエアクリーナ30とその下流に設けられたサージタンク32との間にスロットルバルブ12が設けられている。
【0017】
また、スロットルポジションセンサ24はスロットルバルブ12の開度を制御部20に送信する。スロットルポジションセンサ24は例えばモータ21の回転数を測定して当該回転数からスロットルバルブ12の開度を算出して制御部20に開度を送信する。
【0018】
EGRバルブ14は内燃機関22から排出された排気の一部を吸気側に還流する還流排気量を調整可能な弁体を含んで構成され、例えばニードルバルブから構成される。EGRバルブ14はモータ36等の駆動手段によって駆動され、この駆動に応じてEGRバルブ14の開度が変化する。この開度変化に応じてEGRバルブ14を通過する還流排気量が調整される。
【0019】
また、EGRバルブ14は排気還流管40内に設けることができる。例えば本実施形態では、排気還流管40を流れる還流排気を冷却するEGRクーラー42より下流側(吸気管側)にEGRバルブ14が設けられている。
【0020】
また、排気還流管40は排気管38と吸気管28とを結んでいる。本実施形態では排気還流管40は排気管38の部分のうち、排気中の大気汚染物質を除去する触媒器44よりも上流に接続されるとともに吸気管28のサージタンク32よりも下流に接続されている。
【0021】
また、EGRバルブポジションセンサ25はEGRバルブ14の開度を制御部20に送信する。EGRバルブポジションセンサ25は例えばモータ36の回転数を測定して当該回転数からEGRバルブ14の開度を算出して制御部20に開度を送信する。
【0022】
吸気圧センサ18は、サージタンク32内の吸気圧を計測して制御部20に送信可能なセンサを含んで構成されている。吸気圧センサ18は例えば半導体式圧力センサから構成することができる。また、本実施形態にでは吸気圧センサ18は絶対真空を0[kPa]とした絶対圧を電気信号に変換して制御部20に圧力信号を送信可能となっている。
【0023】
吸気バルブ16は、スロットルバルブ12を介して送られた新気及びEGRバルブ14を介して送られた還流排気が混合された吸気を内燃機関22の燃焼室26へ導入する際の吸気導入量を調整可能な弁体を含んで構成されている。吸気バルブ16の吸気導入量の調整手段として種々の手段が挙げられるが、例えば図2に示すようなリフト量可変の吸気バルブシステム50が用いられる。
【0024】
吸気バルブシステム50は、吸気バルブ16と、ロッカーアーム52と、ラッシュアジャスター54とを含んで構成される。さらに、コントロールシャフト56に支持された揺動アーム58及びローラーアーム60と、カムシャフト62に支持されたカム64を含んで構成されている。さらに吸気バルブシステム50は、吸気バルブ16のリフト量(進退量)を計測する吸気バルブポジションセンサ27を備えている。
【0025】
図示しないタイミングチェーンによってカムシャフト62が回転し、これに伴ってカム64が回転する。回転に伴ってカム64の突出部がローラーアーム60を押すことでローラーアーム60及び揺動アーム58がコントロールシャフト56を回転軸にして回動する。さらに揺動アーム58の回動に伴い揺動アーム58のカム面66がロッカーアーム52を押すことで吸気バルブ16とラッシュアジャスター54が直線方向に移動する。吸気バルブ16の移動に伴って内燃機関22の吸気ポート68が燃焼室26に対して開放され、吸気ポート68から燃焼室26に吸気が導入される。
【0026】
吸気バルブ16の進退量または移動量(図2にて矢印70で示す)はリフト量と呼ばれ、吸気バルブシステム50はこのリフト量を変更可能に構成されている。すなわち、揺動アーム58は図示しないアクチュエータによってコントロールシャフト56に対して回動可能となっている。すなわち、揺動アーム58はコントロールシャフト56に対する初期位置(あるいはローラーアーム60に対する開き角)を調整可能となっている。この調整可能な回動範囲を矢印72で示す。揺動アーム58の初期位置が変化することでロッカーアーム52に当接するカム面66の当接区間が変化する。
【0027】
カム面66は揺動アーム58の回転軸(つまりコントロールシャフト56)に対して非同心円の形状をしており、回転軸からの距離が当接区間によって異なるように形成されている。この様な形状を採ることにより、カム面66の当接区間の変更に伴って回動時にカム面66がロッカーアーム52を押す距離、言い換えるとロッカーアーム52の進退距離が変化し、これに伴って吸気バルブ16のリフト量が変化する。リフト量が変化することによって燃焼室26への吸気導入量が変化する。例えばリフト量が増加すればその分吸気バルブ16が吸気ポート68を開放する時間が長くなり、これに伴って燃焼室26への吸気導入量が増加する。
【0028】
図1に戻り、制御部20は情報を演算するための演算処理部や情報を記憶するための記憶部を備えている。演算処理部は吸気圧センサ18やスロットルポジションセンサ24、EGRバルブポジションセンサ25、吸気バルブポジションセンサ27等の計測機器から送られる情報を受け入れて演算処理し得るともに、スロットルバルブ12用のモータ21やEGRバルブ14用のモータ36、さらには吸気バルブ16のバルブシステム50等の周辺機器に対して開度指令を送信し得る機器から構成される。例えば制御部20はマイクロコンピュータを含んで構成される。このマイクロコンピュータは例えば車両に搭載される電子制御ユニット(ECU)から構成することが可能である。
【0029】
また、記憶部には新気量に対応するスロットルバルブ12の開度、還流排気量に対応するEGRバルブ14の開度、吸気導入量に対応する吸気バルブ16のリフト量等が関数またはマップ(テーブル、表)として記憶されている。さらに記憶部には内燃機関に対する駆動モード(エコモード、パワーモード等)に対応する空燃比及び目標EGR率や、後述する内燃機関の出力制御を実行する上での数式等が記憶されている。記憶部はこれらの情報を記憶可能な機器であればよく、例えばROMやRAM、EPROM、ハードディスク装置等の1つまたは複数の組み合わせから構成することができる。
【0030】
次に、制御部20による内燃機関22の出力制御について説明する。制御部20はアクセルペダル74の踏み込み量を検知するアクセルペダルポジションセンサ76から送信されるアクセルペダルの踏み込み量の変化を検知してこの変化に応じた内燃機関22の出力調整を行う。具体的には、スロットルバルブ12、EGRバルブ14の開度を調整することによって各バルブを通過する新気量、還流排気量を調整するとともに、吸気バルブ16の開度(リフト量)を調整することで新気と還流排気が混合された吸気を内燃機関22に取り込む吸気導入量を調整する。内燃機関22への吸気導入量が調整されることで内燃機関22の出力が制御される。
【0031】
ここで、制御部20はスロットルバルブ12、EGRバルブ14、吸気バルブ16に対する開度調整に際して、モデル予測制御を行うことによりその操作量を求める。モデル予測制御では操作量(入力)と、操作量によって変化する制御量(出力)との関係を表すモデル式(ダイナミクス)を立て、このモデル式に基づいて現在時から見た未来の制御量を予測し、この予測結果から実際の操作量を求める。
【0032】
現時刻をtとし、操作量を入力するステップを制御ステップとし、Npを1以上の整数とすると、現時刻tからt+Np−1の各制御ステップにそれぞれ操作量を入力したときの予測区間[t+1,t+Np]における制御量の予測値を求める。ここで、制御量の予測値を求める際には、当該予測値を設定値(目標値)にできるだけ近づけるように操作量を定める。例えば制御ステップt+Npにおける制御量の予測値と設定値が一致するように操作量を定める。
【0033】
制御量の予測値と設定値とをできるだけ近づけるための手法として、例えば参照軌道と評価関数を用いる。現時刻tにおける制御量y(t)を始点として予測区間[t+1,t+Np]内で制御量が設定値rに徐々に近づく理想的な応答として参照軌道yR(t+j)を設定する。参照軌道は制御の速応性とロバスト性(安定性)との両面を考慮して設定され、例えばむだ時間と一次遅れを考慮した増加率や減少率に基づき現在値から設定値に漸近するような曲線や直線が参照軌道として設定される。参照軌道が設定されると、予測区間[t+1,t+Np]において制御量の予測値yP(t+j)の軌道を参照軌道にできるだけ近づけるように操作量up(t+j)を定める。ここで、制御量の予測値と参照軌道の近さ、及び操作量の妥当性を測る指標として、例えば下記数式1のような評価関数Jを用いる。
【0034】
【数1】
【0035】
または下記数式2のように評価関数Jの表現形式をより簡明にしてもよい。
【0036】
【数2】
【0037】
ここで、Q、Rはともに荷重(重み付け)行列を表す。数式1の第1式及び数式2の第1項は制御量の予測値yPと参照軌道yRとの差を表し、第2項は操作変数uPの変化を表す。評価関数Jの値が小さいほど適切な操作であると規定すると、第1式の第1項は制御量の予測値と設定値とを近づける効果を持ち、第2項は操作量の急激な変動を抑制する効果を持つ。制御部20は種々の操作量及びこの操作量によって得られる制御量の予測値を評価関数に入力して評価関数Jの値を得る。そして入力した操作量及び制御量の予測値のうち評価関数Jの値が最小となった操作量を実際の操作量として用いる。
【0038】
評価関数Jの値を最小にする操作量を求める手段は種々挙げられるが、例えば一般的な二次計画問題の解法を適用することができる。例えば数式2に対して操作量Uに関する勾配∇uJを求める。当該勾配∇uJが0となるときの操作量が評価関数Jの値を最小値にする操作量となる。
【0039】
また、評価関数Jに種々の操作量及び制御量の予測値を入力するに当たり、種々の制約条件を考慮する。例えばEGRバルブ14、スロットルバルブ12、吸気バルブ16の各バルブを通過する流体の流量変化量を操作量とした場合を考える。バルブの機械的な構造等により、1制御ステップあたりの各バルブの開閉速度には上限や下限があり、したがって1制御ステップ当たりの操作変化量にも上限値や下限値が存在する。例えばバタフライバルブはモータを1/4回転させると開度が全開(100%)から全閉(0%)に絞られる。またスクリューバルブはあらかじめ定められたストローク分(例えば10回転)モータを回転させると開度が全開から全閉に絞られる。このことから、バタフライバルブを通過する流体の流量変化の最大値Δuvmaxは、スクリューバルブを通過する流体の流量変化の最大値Δusmaxより一般的には早くなる(Δuvmax>Δusmax)。
【0040】
また、制約条件は操作量のみならず制御量にも定められる場合がある。例えば管内を通過することのできる最大流量等がこれに該当する。さらに、実際の制御系に即した制約条件が加えられる。例えば予測区間において吸気のEGR率がEGR上限率を超過してはならない等の制約が考慮される。ここで、例えばEGR上限率は当該EGR率を超過した場合に失火が生じるおそれの大きい任意の数値が設定される。このようにバルブの構造等によって定まる制約条件をモデル式に加えてこれらの制約条件を満たすような予測値を入力する。制約条件を考慮した評価関数は一般的には下記数式3のように表される。
【0041】
【数3】
【0042】
ここで、各パラメータのアンダーバー(_)やアッパーバー( ̄)はそれぞれ下限値と上限値を表す。制御部20は制約条件を満足する範囲内において評価関数を最小にする操作量を求めるとともにこの操作量に基づく制御量の予測値を算出する。制御量の予測値の算出は所定の制御ステップ、例えば予測区間の最終ステップt+Npまで行う。予測区間において制御量の予測値が求められると、現時刻tにおける操作量up(t)を各バルブの操作量に反映させる。さらに制御ステップがひとつ進み、現時刻t+1において予測区間[t+2,t+Np+1]における制御量の予測値を求め、t+2における予測値yp(t+2)を与える操作量up(t+1)を現時刻における操作量として各バルブの操作量に反映させる。以下制御ステップが一つ進むたびにこれを繰り返す。
【0043】
なお、制約条件が課せられることに伴い、評価関数に入力する解を得られない場合がある。例えば制約条件を破らなければ予測区間内に制御量の予測値を設定値に収束させることができない場合などがこれに該当する。この場合においては制約条件を緩和する、または予測区間を延長するなどの緩和策を実行し、解を得られるようにする。
【0044】
上述したモデル予測制御を本実施形態に即して説明する。例えば図3のように内燃機関22の出力を急減させるような要求があった場合を考える。まず制御部20はモデル予測制御を行うに当たり制御量の現在値を取得する。具体的にはスロットルポジションセンサ24、EGRバルブポジションセンサ25、吸気バルブポジションセンサ27から各バルブの開度を取得する。さらにこれらの開度から各バルブを通過する新気量、還流排気量、吸気量を算出する。これらの値が制御量の現在値となる。
【0045】
さらに制御部20は出力要求に応じた目標吸気導入量、目標新気量、目標還流排気量を求める。例えば制御部20は内燃機関22に対する出力要求をアクセルポジションセンサ76から取得するとともに、内燃機関22の回転数(機関回転数)を取得する。さらに出力要求と回転数とに基づいて内燃機関22の燃焼室26に送り込む目標吸気導入量を決定する。この決定に当たっては出力と回転数に対する吸気導入量が定められたマップ(テーブル、表)や関数に基づいて行ってもよい。
【0046】
さらに制御部20は目標EGR率を取得する。目標EGR率は車両の走行モードによって異なる場合があり、例えば燃費向上を優先するエコモードや加速性能を優先するパワーモード等で目標EGR率が異なる。そこで制御部20は車両の運転者によって選択された走行モードに基づいてこれに対応する目標EGR率を取得する。さらに制御部20は目標吸気導入量と目標EGR率に基づいた目標還流排気量を決定するとともに目標新気量を決定する。これらの値が制御量の目標値となる。
【0047】
さらに制御部20は新気量、還流排気量、吸気量に対する参照軌道を作成する。参照軌道は現在値及び目標値及び参照軌道を作成する際の変化率を定めた条件式(例えば上述したようなむだ時間+一次遅れ系の基礎式)に基づいて作成される。図3では太い破線で示すように現在値から目標値までそれぞれの流量が単調減少するような軌道を参照軌道とする。
【0048】
次に制御部20は新気量、還流排気量、吸気量に対する制約条件を記憶部から呼び出す。具体的には各バルブを通過する流体の流量変化量の上限値及び下限値、EGR上限率、予測値による出力と要求出力との差異についての許容範囲(例えば出力要求値の±5%)を制約条件として記憶部から呼び出す。
【0049】
さらに制御部20はモデル予測制御を含む各バルブの制御を実行する。なお、本実施形態では演算負荷を軽減する目的で最初からEGRバルブ14(還流排気量)、スロットルバルブ12(新気量)、吸気バルブ16(吸気導入量)の3者に対してモデル予測制御を行わずに、予測制御の初期においてはモデル予測制御の対象となるバルブをEGRバルブ14のみとする。一方でスロットルバルブ12及び吸気バルブ16についてはモデル予測制御によらずに内燃機関22に対する出力要求や内燃機関22の回転数等に基づいて予め定められた最適開度や最適リフト量が適用される。そしてEGRバルブ14のみを対象とするモデル予測制御において制約条件を満足する解を得られない場合にはスロットルバルブ12や吸気バルブ16をモデル予測制御の対象バルブとして漸次追加する。
【0050】
例えばスロットルバルブ12について、新気量に対する参照軌道における制御量を予測区間における制御量として仮設定する。同様に吸気バルブ16について、吸気導入量に対する参照軌道における制御量を予測区間における制御量として仮設定する。さらにEGRバルブ14について、還流排気量の予測値をモデル予測制御によって求める。このとき、還流排気量の予測値を求める過程で制約条件を満足する予測値が得られない場合がある。例えば上述した制約条件に即して説明すると、図3に示すように還流排気量の減少率の上限値が還流排気量の参照軌道における減少率を下回り、その結果、制約を考慮した還流排気量の減少率は参照軌道における減少率よりも緩やかなものとなる。その一方で新気量の減少率は参照軌道に沿っている。このような違いから、新気と還流排気との混合気である吸気のEGR率が徐々に増加してEGR上限率を超過してしまう(制約を満足しない)場合がある。
【0051】
そこで制御部20はスロットルバルブ12をモデル予測制御の対象として追加する。つまり予測区間における新気量を参照軌道によるものから修正することでEGRバルブ14に関するモデル予測制御の解を得られるようにする。例えば図3に示すように新気量の減少開始時点を参照軌道の減少開始時点(t+1)よりも遅延させる。図3に示す例では基準時t+1から2制御ステップ分遅延させる。または図4に示すように減少開始時点は変更させずに新気量の時間的な減少率を所定割合で緩和する。このようにすることでEGR上限率の超過を防止できる。
【0052】
一方、新気量の予測値を修正(減少開始時点の遅延または減少率の緩和)することによって新気量が相対的に増加する。このとき、新気量の修正前後で吸気導入量を変えないとすると、新気量修正後において燃焼室26の吸気導入量が相対的に増加する。その結果、内燃機関22の出力が要求出力より増加してしまい、予測値に基づく出力と要求出力との差異が許容範囲を超過して制約条件を満たさない場合がある。
【0053】
そこで制御部20は吸気バルブ16をモデル予測制御の対象としてさらに追加する。つまり予測区間における吸気導入量を参照軌道によるものから修正することでEGRバルブ14及びスロットルバルブ12に関するモデル予測制御の解を得られるようにする。例えば吸気導入量の時間的な減少率を一時的に増加させる、つまり、新気量の修正前よりも吸気導入量を絞る。例えば図3、4の最下段に示すように一時的に参照軌道よりも吸気導入量を絞る。このようにすることで予測値による出力と要求出力との差異を許容範囲内に抑えることができる。
【0054】
以上のように、還流排気量(EGRバルブ14)単独でのモデル予測制御において制約条件を満足する予測値が得られない場合には、新気量(スロットルバルブ12)及び吸気導入量(吸気バルブ16)の予測値を参照軌道によるものから修正することで、いずれの制約にも反しない形で各バルブの予測区間における最適解を求めることができる。
【0055】
最適解が求められると、制御部20は予測区間における流体の変化量(操作量)の予測値のうち、現在時の操作量にあたる制御ステップtの新気量、還流排気量、吸気導入量の変化量を取得する。さらにこれらの流量を上述したマップにより各バルブの最適な開度に変換する。制御部20は変換された開度を現在時の指令値として各バルブに指令する。
【0056】
また、上述の実施形態に加えて、EGRバルブ14の絞り開始時点を繰り上げるような修正を行ってもよい。例えば参照軌道におけるEGRバルブ14の絞り開始時点が制御ステップt+1よりも後である(例えばt+3)ような場合には、それよりもEGRバルブ14の絞り開始時点を早めてEGR率の上昇を抑制するようにしてもよい。
【0057】
以上説明したモデル予測制御を含む制御部20による内燃機関22の制御フローを図5、6を用いて説明する。制御部20は内燃機関22に対する出力要求を取得するとともに、内燃機関22の回転数(機関回転数)を取得する(S1)。さらに出力要求と回転数とに基づいて内燃機関22の燃焼室26に送り込む目標吸気導入量を決定する(S2)。この決定に当たっては出力と回転数に対する吸気導入量が定められたマップ(テーブル、表)や関数に基づいて行ってもよい。さらに目標吸気導入量に合わせて燃焼室に導入する燃料噴射量を決定してもよい。
【0058】
さらに制御部20は目標EGR率を取得する(S3)。目標EGR率は車両の走行モードによって異なる場合があり、例えば燃費向上を優先するエコモードや加速性能を優先するパワーモード等で目標EGR率が異なる。そこで制御部20は車両の運転者によって選択された走行モードに基づいてこれに対応する目標EGR率を取得する。さらに制御部20は目標吸気導入量と目標EGR率に基づいた目標還流排気量を決定する(S4)とともに目標新気量を決定する(S5)。
【0059】
さらに制御部20はモデル予測制御を実行する。まず制御部20はEGRバルブ14にのみモデル予測制御を実行する(S7)。すなわち、還流排気量に関するモデル式、評価関数及び制約条件(還流排気量及びその変化量の上限値及び下限値に関する制約条件、EGR上限率、要求出力と予測出力との許容乖離割合等)を記憶部から呼び出すとともに、予測区間における新気量(スロットルバルブ12)及び吸気導入量(吸気バルブ16)の値を参照軌道の値に設定してEGRバルブ14に対するモデル予測制御を行う。この場合において制約に反することなく還流排気量(EGRバルブ14)が予測期間内に目標還流排気量に到達できるか、つまり解が存在するか否かを予測制御によって判定する(S8)。解が存在するのであれば制御部20は評価関数Jを用いて最適解を求めるとともに制御ステップtにおける最適解を現在時のEGRバルブ14に適用する(S9)。またこのとき、スロットルバルブ12及び吸気バルブ16については内燃機関22に対する出力要求や内燃機関22の回転数等に基づいて予め定められた最適開度や最適リフト量が適用される。
【0060】
ステップS8において解が存在しない場合は新気量(スロットルバルブ12)をモデル予測制御の対象として追加する。すなわち新気量に関するモデル式、評価関数、制約条件(新気量及びその変化量の上限値及び下限値)を記憶部から呼び出すとともに、EGRバルブ14及びスロットルバルブ12に対してモデル予測制御を実行する(S10)。さらに制御部20は解の有無(制約に反することなく予測期間内に目標還流排気量及び目標新気量に到達できるか否か)について判定する(S11)。解が存在するのであれば制御部20は評価関数Jを用いて最適解を求めるとともに制御ステップtの最適解を現在時のEGRバルブ14及びスロットルバルブ12に対して適用する(S12)。またこのとき、吸気バルブ16については上述した最適リフト量が適用される。
【0061】
ステップS11において解が存在しない場合は吸気導入量(吸気バルブ16)をモデル予測制御の対象として追加する。すなわち吸気導入量に関するモデル式、評価関数、制約条件(吸気導入量及びその変化量の上限値及び下限値)を記憶部から呼び出すとともに、EGRバルブ14、スロットルバルブ12、吸気バルブ16の3者に対してモデル予測制御を実行する(S13)。さらに制御部20は解の有無について判定し(S14)、解が存在するのであれば評価関数Jを用いて最適解を求めるとともに制御ステップtの最適解を現在時のEGRバルブ14、スロットルバルブ12、吸気バルブ16に対して適用する(S15)。また、解が存在しない場合はいずれかの制約を緩和させて、例えば出力要求を緩和させて再度予測制御を行う(S16)。
【0062】
なお、上述の実施形態においてはモデル予測制御の対象を最初はEGRバルブ14のみとし、解が得られない場合に漸次スロットルバルブ12、吸気バルブ16と対象を拡大していったが、この形態に限られない。例えば制御部20の演算能力に余裕がある場合等は図7に示すようにステップS6〜ステップS12までを省略して最初から3者に対してモデル予測制御を実行してもよい。
【0063】
次に、予測値や制約を考慮するうえで必要となる、各バルブ、流量、EGR率に対するモデル式を説明する。まず、内燃機関22に対する出力であるトルクτは下記数式4のように表すことができる。
【0064】
【数4】
【0065】
ここで、k1、k2は係数(以下、kiはいずれも係数とする)、Pmは吸気管圧、Peは排気集合部圧、Hfは低位発熱量(発熱量から潜熱を除いたもの)、αは空燃比(吸気/燃料)、Mcは吸気導入量(吸気バルブ16を通過する新気+還元排気の全量)を表している。
【0066】
また、吸気導入量Mcは下記数式5のように表すことができる。
【0067】
【数5】
【0068】
ここで、uvlは吸気バルブ16のリフト量、ωは内燃機関22の回転数(機関回転数)であって、f(uvl,ω)はこれらの値を変数とする関数(非線形関数)を表している。さらに、Mbackは吸気バルブ16と排気バルブのオーバーラップ時における排気の逆流量を表している。また、数式5の差分を求めることで1制御ステップ当たりの吸入導入量Mcの変化量δMcを求めることができる。
【0069】
また、スロットルバルブ12における新気量Mtは下記数式6のように表すことができる。
【0070】
【数6】
【0071】
ここで、utはスロットルバルブ開度を表し、At(ut)はスロットルバルブ開度utをパラメータとするスロットルバルブの有効開口面積の関数を表している。また、Poは大気圧、Toは大気温を表している。また、Ψ(Pm,Po,Toは)吸気管圧、大気圧、大気温をパラメータとするノズル式を表している。また、数式6の差分を求めることで1制御ステップ当たりの新気量Mtの変化量δMtを求めることができる。
【0072】
また、EGRバルブ14における還流排気量Megrは下記数式7のように表すことができる。
【0073】
【数7】
【0074】
ここで、uegrはEGRバルブ14の開度を表し、Aegr(uegr)はEGRバルブ14の開度uegrをパラメータとするEGRバルブ14の有効開口面積の関数を表している。また、PegrはEGRバルブ14の上流圧、TegrはEGRバルブ14の上流ガス温度を表し、Ψ(Pm,Pegr,Tegr)は吸気管圧、EGRバルブ14の上流圧、EGRバルブ14の上流ガス温度をパラメータとするノズル式を表している。また、数式7の差分を求めることで1制御ステップ当たりの還流排気量Megrの変化量δMegrを求めることができる。
【0075】
さらに、上記数式4−7における吸気管圧Pmは下記数式8のように表すことができる。
【0076】
【数8】
【0077】
ここで、tは現在時刻、hはサンプル時間(1制御ステップ)、Rはガス定数、Tmは吸気温度、Vmは吸気管28の容積を表している。
【0078】
さらに還流排気量に関して、EGRバルブ14から吸気バルブ16までの還元排気量のモデル式(ダイナミクス)は下記数式9にように表すことができる。
【0079】
【数9】
【0080】
ここで、Mcyregrは吸気バルブ16を通過する還流排気量、d(t)はむだ時間(入力から出力が応答し始めるまでに要する時間)、T(t)はダイナミクスの時定数(応答し始めてからの変化の割合)を表している。
【0081】
また、EGR率βegrは下記数式10のように表すことができる。
【0082】
【数10】
【符号の説明】
【0083】
10 制御装置、12 スロットルバルブ、14 EGRバルブ、16 吸気バルブ、18 吸気圧センサ、20 制御部、21 スロットルバルブ用モータ、22 内燃機関、24 スロットルポジションセンサ、25 EGRバルブポジションセンサ、26 燃焼室、27 吸気バルブポジションセンサ、28 吸気管、29 取り込み口、30 エアクリーナ、32 サージタンク、36 EGRバルブ用モータ、38 排気管、40 排気還流管、42 EGRクーラー、44 触媒器、50 吸気バルブシステム、52 ロッカーアーム、54 ラッシュアジャスター、56 コントロールシャフト、58 揺動アーム、60 ローラーアーム、62 カムシャフト、64 カム、66 カム面、68 吸気ポート。
【特許請求の範囲】
【請求項1】
吸気管に取り込まれる新気量を調整するスロットルバルブと、
内燃機関の排気の一部を前記吸気管に戻す還流排気量を調整するEGRバルブと、
新気及び還流排気が混合された吸気を前記吸気管から前記内燃機関の燃焼室に導入する吸気導入量を調整する吸気バルブと、
前記スロットルバルブ及び前記EGRバルブの開度を絞る際に、前記還流排気量の混合率であるEGR率の上限値を超過しないように前記スロットルバルブを制御するとともに前記吸気バルブの開度を絞るように制御する制御部と、を備えることを特徴とする、内燃機関の制御装置。
【請求項2】
請求項1に記載の内燃機関の制御装置であって、
前記制御部は、
前記スロットルバルブ及び前記EGRバルブ及び前記吸気バルブの制御に応じて目標新気量、目標還流排気量及び目標吸気導入量に収束するまでの前記新気量、前記還流排気量、前記吸気導入量の時間的な変化を予測し、
前記EGR率が上限値を超過すると予測された場合には、前記新気量の減少開始時点を前記基準時より遅延させる又は前記新気量の時間的な減少率を予測における制御より緩やかにするように前記スロットルバルブを制御するとともに、前記予測における制御より前記吸気バルブの開度を絞るように制御することを特徴とする、内燃機関の制御装置。
【請求項3】
請求項2に記載の内燃機関の制御装置であって、
前記制御部は、前記EGR率が上限値を超過すると予測された場合には、前記還流排気量の減少開始時点を前記基準時より早めるように前記EGRバルブを制御することを特徴とする、内燃機関の制御装置。
【請求項1】
吸気管に取り込まれる新気量を調整するスロットルバルブと、
内燃機関の排気の一部を前記吸気管に戻す還流排気量を調整するEGRバルブと、
新気及び還流排気が混合された吸気を前記吸気管から前記内燃機関の燃焼室に導入する吸気導入量を調整する吸気バルブと、
前記スロットルバルブ及び前記EGRバルブの開度を絞る際に、前記還流排気量の混合率であるEGR率の上限値を超過しないように前記スロットルバルブを制御するとともに前記吸気バルブの開度を絞るように制御する制御部と、を備えることを特徴とする、内燃機関の制御装置。
【請求項2】
請求項1に記載の内燃機関の制御装置であって、
前記制御部は、
前記スロットルバルブ及び前記EGRバルブ及び前記吸気バルブの制御に応じて目標新気量、目標還流排気量及び目標吸気導入量に収束するまでの前記新気量、前記還流排気量、前記吸気導入量の時間的な変化を予測し、
前記EGR率が上限値を超過すると予測された場合には、前記新気量の減少開始時点を前記基準時より遅延させる又は前記新気量の時間的な減少率を予測における制御より緩やかにするように前記スロットルバルブを制御するとともに、前記予測における制御より前記吸気バルブの開度を絞るように制御することを特徴とする、内燃機関の制御装置。
【請求項3】
請求項2に記載の内燃機関の制御装置であって、
前記制御部は、前記EGR率が上限値を超過すると予測された場合には、前記還流排気量の減少開始時点を前記基準時より早めるように前記EGRバルブを制御することを特徴とする、内燃機関の制御装置。
【図1】

【図2】
【図3】

【図4】

【図5】
【図6】

【図7】
【図8】
【図9】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−32741(P2013−32741A)
【公開日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願番号】特願2011−169375(P2011−169375)
【出願日】平成23年8月2日(2011.8.2)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願日】平成23年8月2日(2011.8.2)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]